2. Development Status of Concrete Construction Robots
2.1. Concrete Distribution Robots
According to the concrete distribution mode, construction robots can be categorized as pouring concrete robots and shotcrete construction robots. Concrete pouring refers to the process of pouring concrete into formworks or planes until they are plasticized [
37]. The distribution of concrete is important with regard to concrete pouring. The traditional manual distribution of concrete has problems such as a high working intensity, slow working speed, and uneven distribution of concrete. However, a concrete distribution robot can achieve the uniform distribution of mixed concrete on a large surface or template system [
38]. Shotcrete is a raw material that behaves the same as conventional concrete, but the construction process is special [
39]. This process sprays concrete mixed with a certain amount of accelerant into a tunnel rock layer or the surface of initial support by means of a jet mechanical arm, which can protect the rock or structure part.
2.1.1. Concrete Pouring Construction Robot
The commonly used concrete pouring construction robots include concrete pumping pouring robots and concrete tower crane pouring robots. Concrete pumping pouring robots require relatively high quality for a slump of concrete and need to move the conveying pipe in time. The concrete distribution height is limited, but it saves time and manpower.
The stationary concrete distribution robot developed by InaraMART consists of three parts: a base part that can be fixed to the ground, a middle part that consists of four motion joints and links, and an end concrete pouring actuator [
40]. Its towering crane structure can lift materials or equipment to appropriate positions and manually control the swing of joints and connecting rods to open the end concrete pouring actuator at the appropriate positions. Because of the large swing range of the connecting rod, it requires a large working space. However, due to its high structure, it is not suitable for construction in buildings.
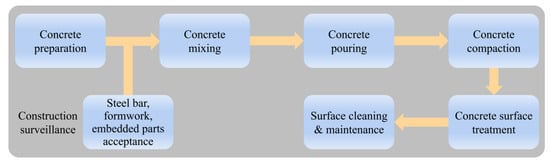
Shyam et al. introduced and analyzed the SP 1200D concrete pumping pouring robots (
Figure 2a) [
41], which can be mounted on a truck or placed on a trailer. This robot normally pumps concrete at lower volumes than boom pumps, which can be widely used for smaller-volume concrete placing applications such as swimming pools, sidewalks, single-family home concrete slabs, and most ground slabs. The Intelligent Steering mobile concrete pumping pouring robot (
Figure 2b) developed by SOMERO [
42] consists of several four-wheel mobile robot vehicles equipped with concrete pumping hoses, several of which are used for guidance and positioning. Moreover, an end vehicle is used for concrete pouring execution. The motion path of the robot vehicle can be controlled manually, and the concrete can be transported and distributed with the hose. It is suitable for the ground concrete pouring of large buildings with large areas. Developed by LIEBHERR [
43], the Crawler concrete pumping pouring robot 140 D-K (
Figure 2c) can be flexibly maneuvered with its sturdy construction and has been specially developed for concrete pile foundations in combination with a drilling rig.
Figure 2. Mobile concrete pumping pouring robots. (
a) SP 1200D concrete pumping pouring robots [
41], reproduced with permission from Shyam et.al., Improving the efficiency of stationary concrete pumps using whitworth quick return mechanism; published by IOP Publishing, 2021; (
b) Intelligent Steering mobile concrete pumping pouring robots [
42], reproduced with permission from SOMERO; 2022; (
c) Crawler concrete pumping pouring robots [
43], reproduced with permission from LIEBHERR; 2022.
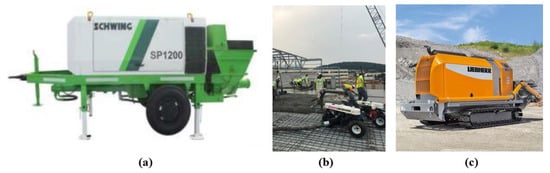
Cantilever concrete pouring robots are used on most larger construction projects because they are capable of pumping at very high volumes and because of the labor-saving nature of the placing boom. A cantilevered concrete pouring robot [
44,
45] uses a remote-controlled articulating robotic arm (called a boom) to place concrete accurately when attached to a truck, and longer units are attached to semi-trailers, as shown in
Figure 3. The robotic arm has complex redundant motion joints. In order to achieve intelligent construction, Kang et al. [
46] used a hybrid genetic algorithm for the optimal trajectory planning of redundant mechanisms. A thorough overview of the dynamic modeling of the manipulator was also introduced [
47,
48].
Figure 3. Cantilever concrete pouring robot. (
a) Mobile cantilever concrete pouring robot [
44], reproduced with permission from Wanner et al., Tool-center-point control of a flexible link concrete pump with hydraulic limitations using quadratic programming; published by IEEE, 2019; (
b) Cantilever concrete pouring robot components [
45], reproduced with permission from Wu et al., Fatigue life prediction for boom structure of concrete pump truck; published by Elsevier, 2016.
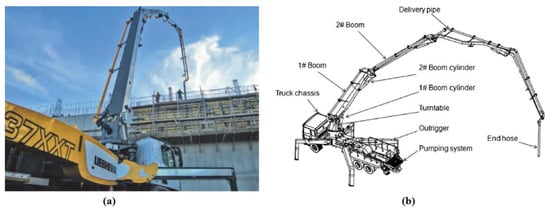
The intelligent follow-up concrete distribution robot (
Figure 4a) developed by Bright Dream Robotics [
49] is composed of a large arm and a small arm driven by a motor, a platform with an adjustable building height, and a hose for pumping concrete. By controlling the combined movement of the upper and lower arms, workers can easily change the position of the end hose to quickly carry out construction and concrete distribution. Additionally, it is suitable for pouring concrete on the flat floor of a building without a roof.
Figure 4. Concrete tower crane pouring robots. (
a) The intelligent follow-up concrete distribution robot [
49], reproduced with permission from Bright Dream Robotics; 2022; (
b) Traditional concrete tower crane pouring robots with site layout [
50], reproduced with permission from Yang et al., Vision-Based Tower Crane Tracking for Understanding Construction Activity; published by American Society of Civil Engineers, 2014.
Concrete tower crane pouring robots have low requirements on the collapse degree of concrete, and the quality of concrete is well controlled in the distribution process. The height of distribution is not restricted, and there is generally no need for handling. Yang et al. [
50] exploited a model-based visual pose estimation algorithm to track the jib angle versus time that determines the crane process model and site layout. In order to improve the construction time and precision of concrete distribution, Shapira et al. [
51] designed a tower crane-mounted live video system to enhance the visibility of the operator for both daytime and night-time operations.
2.1.2. Shotcrete Construction Robot
Shotcrete is used to spray concrete mixed with a certain amount of accelerant into a tunnel rock layer or onto the surface as initial support by means of the mechanical arm of a jet machine to protect the rock or the structure. This construction process is simple and fast, which improves the construction speed and reduces the disassembly process of formwork construction. The concrete density is high with good impermeability, and economic benefits are significantly improved. Shotcrete is widely used in the construction of both conventional railway and highway tunnels that play a supporting role in special hydraulic tunnel projects. In contrast to concrete pouring construction robots, this placement method enables shotcrete to be placed in vertical or overhead positions with irregular geometry and little or no formwork [
52].
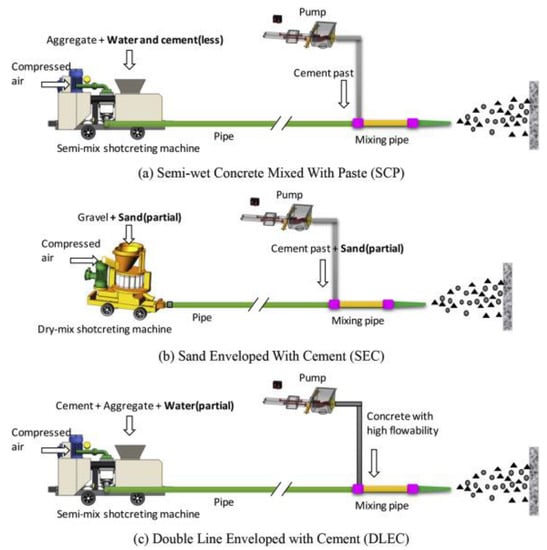
For instance, Zhu et al. introduced the evolution of the shotcrete construction robot (
Figure 5) construction process [
53]. According to the construction method, shotcrete can be applied with a dry method or a wet method [
54]. Wet construction mixes the concrete with good workability and accelerator and sprays it onto the surface of the structure with the help of a jet [
55]. Dry construction can introduce dust and other serious pollution, causing great harm to the human body and increasing the rebound rate. Compared with dry spraying, wet spraying produces less rebound and dust and can achieve higher coating quality [
56]. Therefore, engineers have been focusing on the development of wet-spraying robots.
Figure 5. Schematic of evolved processes for shotcrete construction robot [
53], reproduced with permission from Zhu et al., Effect of Doped Glass Fibers on Tensile and Shear Strengths and Microstructure of the Modified Shotcrete Material: An Experimental Study and a Simplified 2D Model; published by MDPI, 2021.
2.2. Concrete Leveling and Compaction Robots
Because the concrete pouring process will inevitably lead to the existence of internal voids and uneven pouring surfaces, it is necessary to determine the leveling and compaction before concrete solidification. Manual leveling and compaction usually involve pouring concrete. Then, workers with spades that are preliminarily lying flat perform slurry beating so that sand and stone are evenly distributed, concrete bubbles are released, and the overall concrete is compacted [
57]. These steps require workers with excellent experience, which is difficult to obtain. The final concrete leveling effect and structural strength are related to the technology of the workers [
58]. Concrete leveling and compaction robots can improve the flatness of the building plane, optimize the uniform distribution of coarse and fine materials in the concrete, and improve the durability of the concrete [
59]. A concrete compacting robot can optimize the uniform distribution of coarse and fine materials in concrete and improve the durability of concrete [
60]. This process partially or fully automates a highly repetitive and labor-intensive task.
With the progress of laser calibration and control technology, autonomous concrete floor treatment equipment (laser leveling machines) has appeared on the market, which is used to replace traditional manual work [
24]. Laser flat heads are divided into scrapers, cloth screws, vibrators, and leveling beam modules. According to traditional methods of construction, after pouring concrete, it is necessary to scrape the excess concrete, roll it with a roller, spray a cement slurry, rub it with wood, and finally wipe it. These comprise multiple construction procedures. The use of laser leveling machine construction integrates these multiple procedures together, with one machine significantly improving construction progress and quality.
In the 1950s, an engineer with the Kansas State Highway Commission invented the first autonomous concrete floor screeds. By changing the indicator, the operator can adjust the height of the leveling mechanism by adjusting the screw in order to obtain a relatively smooth concrete pavement. The maximum span of the equipment in the ground leveling operation can reach 7.4 m [
61]. Caterpillar is one of the most representative screen-leveling equipment and production enterprises in the world, and the most representative product is the M series screeds [
62]. The screeds are characterized by a number of operation gears, such as high speed and low torque or high torque and low speed, according to the consistency of the concrete.
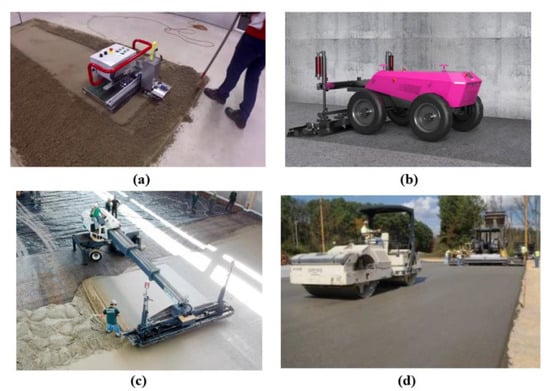
The leveling equipment and leveling devices (
Figure 6a) developed by Floor master corporation are designed as a crawler car, with a leveling mechanism and a compacting mechanism in front of the car [
63]. The spiral device of the flattening mechanism is controlled by the motor and is used for dispersing the excess concrete materials accumulated in front of the vehicle to form a primary mortar surface. The motor drives the ball screw to rotate, which further drives the compacting plate of the compacting mechanism to vertically beat the concrete surface. In addition, the laser receiver and the photoelectric sensor can accurately control the concrete compacting height and the self-running position. Workers are only needed to control the machine, which reduces the labor intensity. Moreover, this equipment is suitable for leveling and compacting the ground.
Figure 6. Concrete leveling and compaction robots. (
a) Micro-concrete leveling robots [
63], reproduced with permission from Floormaster; 2021; (
b) Medium-scale concrete leveling robots [
64], reproduced with permission from Ifdesign; 2021; (
c) Large-scale concrete leveling robots [
65], reproduced with permission from Fortepiso; 2018; (
d) Concrete compaction robots [
66], reproduced with permission from Mehta et al., Advancements in concrete technology; published by American Concrete Institute, 1999.
The ground leveling robot (
Figure 6b) developed by Guangdong Bojiatuo Construction Technology Co., Ltd. (Foshan, China) is designed as a four-wheeled trolley [
64]. The actuator in front of the robot includes a scraper for pre-leveling the concrete surface and a whole plate for releveling. It has a unique two-degree-of-freedom (2-DoF) adaptive system, high-precision laser identification and measurement system, and a real-time control system. This system can dynamically adjust and accurately control the end of the actuator so that it can always maintain a millimeter-level accuracy. Based on the self-developed GNSS navigation system, the ground leveling robot can automatically set the planning path of concrete leveling and achieve the autonomous leveling construction of concrete ground. It could be used for smaller industrial projects, commercial work, and residential slab-on-grade.
Large-scale concrete leveling robots (
Figure 6c) have been developed by the Fortepiso Corporation [
65]. The robot travels over an area to be paved, similar to a train on a track. This operation requires the placement of concrete and the speed of the pavers. A special paving system provides the appropriate vibration and consolidation for each layer, resulting in a smooth surface. Patented molds incorporate double paving into a single mold design. The system avoids not only the need to use more equipment for the job but also the need to extend the pavers to a great length between the front and back for a second layer of paving. Though the large laser leveling machine technology only needs reference point control, it can ensure the ground smoothness of a large area of work. Laser technology reduces the errors caused by human factors and solves the conventional contradiction of a large area and short period, poor smoothness, low construction process molding, and no construction joints. With a high degree of mechanization, laser technology can effectively liberate productivity and greatly reduce construction costs. Abhishek et al. introduced a concrete compaction robot [
66] with two rolling barrels (
Figure 6d). The two barrels at the rear side are compacted twice, and the last rolling barrel is driven by a motor. This can only control its forwards or backward movement and needs to be carried by workers to change direction. It is suitable for the compaction of ground concrete.
2.3. Concrete Floor Finishing Robots
2.3.1. Semi-Autonomous Concrete Floor Finishing Robot
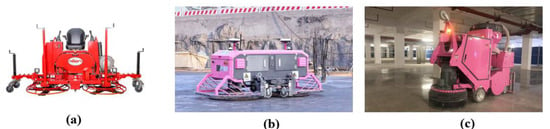
The Polishing Rider (
Figure 7a), developed by the Allen Engineering Corporation, is driven by workers for a concrete polishing process [
69]. Under the car, there are two sets of mud blades that can rotate at high speed and high torque. Each blade forms a small angle with the ground, which presses the concrete surface under high-speed rotation, extrudes water, and fills the surface gap. In addition, it is equipped with standard features of power steering control and jacks to ensure that workers can easily drive indoors and complete the steering. The operator riding the machine needs the skill to drive it and must endure the violent vibrations of its engine and trowel.
Figure 7. Concrete surface treatment robots. (
a) The polishing rider [
69], reproduced with permission from Allen Engineering; 2020; (
b) The basement glazing robot [
49], reproduced with permission from Bright Dream Robotics; 2022; (
c) The floor grinding robot [
70], reproduced with permission from Bright Dream Robotics; 2022.
The basement glazing robot (
Figure 7b) developed by Guangdong Bojiatuo Construction Technology Co., Ltd. achieves the autonomous construction of concrete floor glazing through an intelligent motion control algorithm and integrated navigation technology [
49]. It is also actuated by two sets of blades that rotate at high speed. The robot moves according to a pre-programmed path for polishing, but at the edge of the wall, the robot spatula cannot move. Thus, it needs to be handled manually.
A floor grinding robot (
Figure 7c) developed by Guangdong Bojiatuo Construction Technology Co., Ltd. is used to remove floating slurry on the surface of the concrete after solidification to carry out subsequent floor surface construction work [
70]. The main purpose is to replace the grinding mill. The body also carries a water tank. Motor control for high-speed spinning mills that remove the floating pulp in the process can reduce dust pollution and helps to prolong the service life of grinding. This robot is not easy to scratch and can improve the quality of grinding, perform a relatively dumb light effect, and provide the daily maintenance of the ground. Only one person is required to control the construction of the grinding robot. It is applied to the construction of epoxy floors, solidified floors, and emery floors of underground garages and indoor workshops.
2.3.2. Autonomous Concrete Floor Finishing Robot
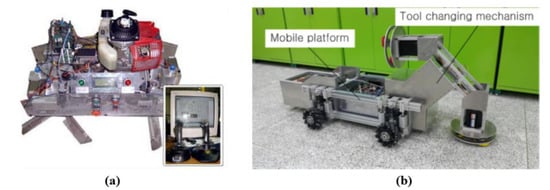
Woo et al. designed a small concrete floor finishing trowel robot (
Figure 8a) consisting of a mobile platform central unit with electric motors [
71]. The units are located on the front and back of the central unit, and the measuring and control units are located on the top of the mobile platform central unit. The end-effector mounted at the bottom of the work unit performs floor finishing. The end-effector uses an ultrasonic vibration unit connected to a spatula, which squeezes the concrete surface to achieve a polishing effect. The robot can be operated remotely by a worker or by a pre-programmed movement path.
Figure 8. Concrete surface treatment robots. (
a) Small concrete floor finishing trowel robot [
71], reproduced with permission from Woo et al., Experiment of Concrete Floor Finishing Robot; published by Institute of Control, Robotics and Systems, 2004; (
b) Concrete polishing robot system [
72], reproduced with permission from Cho et al., Performance Evaluation of Concrete Polishing Robot with Omnidirectional Mobile Mechanism; published by The Korean Society of Manufacturing Technology Engineers, 2016.
Cho et al. designed a concrete polishing robot system (
Figure 8b) as a mobile trolley driven by four Macanum wheels [
72]. There are two wheels on each side that can move forward/backward and rotate according to the direction of rotation of the left and right wheels. A scraper is installed on the front side of the trolley to make the concrete surface smoother. It works through a preset motion trajectory without manual operation. This robot is suitable for residential floors, warehouses, basements, factories, airports, shopping malls, and other areas that need high-precision concrete ground constructions.
2.4. Concrete Surface Painting Robots
When the concrete is solidified, according to the environmental requirements, it may be necessary to spray paint on the surface of the solidified concrete to achieve a better visual perception [
73]. The painting color can be adjusted according to the environmental needs, and the compatible color can be sprayed to produce color patterns. After spraying, a protective film is added to the surface of the concrete, which can increase the wear resistance of the concrete surface. This film is conducive to surface cleaning and maintenance. Furthermore, rich colors can be used to coordinate with the surrounding scenery. At present, existing concrete surface painting is mainly performed through manual scraping or rolling [
74]. This method is laborious, costly, and inefficient, and the construction effect is too dependent on the technology of construction personnel to ensure the uniformity of the coating. If the external wall is sprayed, the construction personnel need to be hoisted at a high altitude with a crane, which has a potential safety hazard [
75]. The use of robots for this type of work is stable, safe, and reliable, resulting in high efficiency and lower construction costs. Spraying construction is a common process in decoration engineering, including indoor spraying, exterior spraying, floor coating, and other processes [
76]. The common moving modes are guide rail, climbing wall, and mobile [
77].
Warszawsky et al. [
78] developed a robot for interior finishing tasks named “TAMIR”, composed of six-degree-of-freedom robotic arms and a removable chassis. Kahane et al. [
79] adopted human–computer interaction to optimize the working efficiency of the robot and set three working scenes, which can realize the switching and movement of different working scenes. In 2018, Asadi et al. [
80] developed a man–machine collaborative indoor spraying robot called Pictobot based on this classic structure, as shown in
Figure 9a. Pictobot consists of six components: a mobile chassis, an airless spraying system, a self-lifting structure (maximum lifting height of 10 m), a mechanical arm, and a sprinkler head device. Operator perception and judgment are responsible for setting spraying parameters (pressure, thickness, etc.) through remote operation control of the changing robot work site to cope with the changing working environment. The robot is responsible not only for the low wall and corner painting operations but also for spraying at the height of the wall to reduce the heavy work of the workers, such as climbing and bending. With the help of the sensor device, the scene is reconstructed, the 3D characteristics of the wall are analyzed, the height of the lifting mechanism is then automatically controlled, and the movement of the arm of the spraying gun is finally planned. In construction sites without manual participation, an APP remote control robot can be used for manual operations and autonomous spraying operations.
Figure 9. Concrete surface painting robots. (
a) The indoor spraying robot [
80], reproduced with permission from Asadi et al., Pictobot: A cooperative painting robot for interior finishing of industrial developments; published by IEEE, 2018; (
b) the OutoBot robot [
81], reproduced with permission from Cho et al., Wind resistance performance analysis of automated exterior wall painting robot for apartment buildings; published by Korean Society of Civil Engineers, 2015.
Cho et al. [
81] developed the suspended structure OutoBot robot (
Figure 9b), which is hoisted outdoors with a rope during operation. The hydraulic cylinder is supported by four legs to maintain the main body away from the wall. The main body is designed with a manipulator equipped with a camera and a nozzle that can clean the surface or spray with high-pressure water. The working process requires only one worker to remotely control it on the ground. Deploying multiple systems to work together can speed up the process and shorten the construction period. Wang et al. [
82] developed an intelligent spraying robot with an autonomous motion function, as shown in
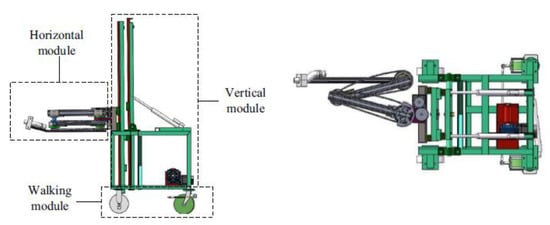
Figure 10. A face-to-face parallel adjustment algorithm based on laser ranging is used to keep the robot parallel to the wall during the spraying process. The polar coordinate transformation method based on LiDAR data enables the robot to automatically identify the areas that do not need spraying. No manual control or handling is required during the entire spraying process.
Figure 10. Overall structure of the 2G robot [
82], reproduced with permission from Wang et al., Intelligent spraying robot for building walls with mobility and perception; published by Elsevier, 2022.
In order to study how spraying can be more flexible in space construction, the statics [
83,
84], kinematics [
85,
86], and dynamics [
87,
88] of deployable structures are studied in depth. Wei et al. [
89] used the collapsible structure of spiral algebra for flexibility in changing their workspace. Lu et al. built deployable components using Myard linkages [
90] and designed a series and parallel manipulator [
91]. Agrawal et al. [
92] and Chen et al. [
93] analyzed and discussed the application of polyhedron geometry to the foldable structure in this respect.
Small-scale indoor spraying robots have also become a focus, as they claim to work at full scale without a reduction in performance [
94,
95,
96]. The 6-DOF manipulator was mounted on a 2-DOF hexapod robot in the horizontal direction, but there was no actual spraying experiment. Compared with an indoor spraying sequence, outer wall spraying is more dangerous. In a special scenario of working at high altitudes outside, an exterior wall painting robot has higher performance requirements in terms of stability, safety, and reliability. In order to achieve efficient and stable operation, an exterior wall spraying robot needs to have the functions of adsorption and free movement of the exterior wall. The common structures are absorption-type structures and suspended structures.
As for the adsorption structure robot, the world’s first wall-climbing robot using vacuum adsorption was developed in 1966 [
97]. Developed by Auto Craw LLC [
98], Auto Crawler adopts the crawler adsorption mode, and a sucker is installed on the outside of the crawler. The crawler and the external wall remain relatively static when walking. During movement, it can adapt to the concave and convex changes of the wall, but the omnidirectional movement ability is poor, and sharp turns will cause damage to the belt. Moreover, the Harbin Institute of Technology has successfully developed a tracked magnetic adsorption robot [
99] and a wall-climbing robot [
100].