Tree Information Modeling (TIM) is conceived as a digital representation of the physical and functional characteristics of a tree. It is a framework following the same tree description system (TDS) to create the digital twins of trees in real life. This framework enables easier data exchange and knowledge-sharing about trees cross multiple related professions such as urban forestry, arboriculture, and botanic plant modeling. With interdisciplinary cooperations in TIM applications, decision-making and supporting tools can be developed to guide trees' planning and life-long management.
- tree information modeling
- tree engineering
- building information modeling
- computational design
- urban green infrastructure
1. Motivation for Initiating TIM
1.1 The Trend of Integrating Trees in Urban Spaces and Buildings
Trees integrated into buildings and dense urban settings have become a trend in recent years worldwide. In Figure 1a, a tree is planted close to a building façade in Munich, growing only one side of its canopy; in Figure 1e, ficus trees that take vertical walls as their foundation are preserved in Hong Kong. Buildings with trees integrated into the envelope appear recently in practice, like Bosco Verticale in Milan, designed by Boeri Studio (see Figure 1b) [1] and Kö-Bogen II in Düsseldorf designed by Ingenhoven Architects [2]. Living Architecture, especially Baubotanik [3] (i.e., the house of future proposed for a museum in Berlin by Ludwig Schönle, shown in Figure 1f), go one step further, exploring trees as load-bearing structure. In Figure 1g, the tree façade forms a vertical open space. In this way, the ESS of urban trees lies not only in their general biomass and canopy volume for increasing biodiversity and thermal comfort but also in configurations of roots and branches as a sustainable material to enclose, support and co-create living spaces.
Without a thoughtful design, however, conflicts between green and gray infrastructures can take place in two aspects: (1) tree crown compete with living space above ground; (2) built underground environment, the other way round, affect tree’s health and security. Therefore, project planning and maintenance will play a key role in its success.
1.2 A Novel Workflow for Tree Design and Management
As illustrated in Figure 2, a typical contemporary architecture design is a set of definitive solutions based on boundary conditions and clients’ requirements. This common workflow is seen in most of nowadays building projects. But to design and build with living trees, projects by Ludwig and Schwertfreger [3] followed an iterative design approach. It means designers repetitively check tree growth (every 1–3 years) and accordingly make adaptions to the design proposal. This proposed workflow requires an appropriate knowledge and data base about tree management.
Figure 2. Proposed workflow for a dynamic design to deal with tree growth and death. Unlike a contemporary architecture design (shown on the top), the design decision (see dark orange rectangles) in the new workflow will no longer be made only once but multiple times through the tree’s life cycle (shown on the bottom).
Although various data about urban trees are collected by different professions for multiple purposes, the communication between them is still limited by unmatched scales and formats. For example, forestry scientists analyze trees’ role in an ecosystem [4]; arboriculturists ensure trees’ safety and health [5][6]; biologists simulate the physiological process of tree growth [7][8]; computer graphic experts contribute to tree geometries and visualizations. For such purposes, they independently collect relevant data about trees to build their own models in various scales, LoD and functions. However, cross-disciplinary communication remains limited owing to unmatched scales and data formats. Cross-platform media, which allows data exchange and model sharing between tree-related professions, is of great importance.
To address this, tree information modeling (TIM) is proposed, aiming at a standardized tree description system in a high level of detail. It serves as a platform to exchange data and share knowledge about tree growth models.
2. Tree Description System in TIM
Similar to the definition of Building Information Modeling (BIM) [9], Tree Information Modeling (TIM) is conceived as a digital representation of the physical and functional characteristics of a tree. Researchers define TIM as a data exchange and knowledge-sharing platform about trees, aiming at a solid basis for decision-making in their planning and life-long management. TIM does not limit to any specific tool or software to convey and calculate the tree data. It is a framework following the same tree description system (TDS) to create the digital twins of trees in real life. A unified updating version of TDS enables the maximum compatibility of all TIM users. The first version of the TDS is stated below (see also Figure 3): A digital tree consists of basic information tags and a geometric representation; basic information tags should include at least tree species, tree age (or years after the first planting), location by longitude and latitude, date of documentation (not necessary for a virtual tree at its planning phase). Information tags must also support additional attributes such as tree images, transplanting history and results of pulling tests in risk assessment. Geometric representations have three compartments: branch (including trunk), leaf canopy, and root; trunk and branch (incl. aerial roots visible above the ground) are represented by the topological skeleton and cylindrical pipelines; leaf canopy is represented by voxel noted with leaf area density; root underground is represented by iso-density layers. Each geometric element can be attached with additional attributes if they are measured, such as decay, sap flow rate, the concentration of phytohormones and electrical resistivity.
Figure 3. Role of TIM and its data structure. TIM integrates tree information required in multiple professions (see also Table 1, e.g., [7], [6], [8]). It functions as a media between trees in reality and their digital twins for specific applications.
Table 1. Comparison between common tree models used in multiple fields and TIM.
| Common Geometric Representation (for Structural Model) |
Common Physiological Parameters (for Functional Models) |
Common Environmental Factors |
|||
|---|---|---|---|---|---|
| Leaf | Branch (Incl. Stem) |
Root | |||
| Forestry science | Crown as an elliptical sphere by its height and diameter | Trunk as a cylinder by DBH and crown height | Not involved | Leaf surface area; sap flux; | Climate; temperature; population density |
| FSPM | Individual leaf as a rectangle by its length, width, and position | L-system with turtle interpretation | L-system with turtle interpretation | Water transit; carbon assimilation and allocation | Gravity; light rays; |
| Mechanical calculation | Windward area, leaf density and drag | Trunk as a unilaterally fixed, tapered cantilever beam | A joint with viscoelastic properties | Not involved | Wind velocity, temperature, moisture content |
| Land resource management | Leaf area index in pixels | Not involved | Not involved | Not involved | Near-infrared spectroscopy; red spectrum; |
| BIM | Crown as an elliptical sphere | Trunk as a cylinder | Not involved | Not involved | Not involved |
| TIM | Voxel by leaf area density | Topological skeleton and pipelines | Layer by iso-density curves and depth | Water transit; to be developed | To be developed |
3. Tools to Acquire a TIM Model
For creating the geometric representation of a tree, the branch (incl. trunk or aerial root) and leaf are visible compartments above the ground, while the root is invisible beneath. So, the surveying methods are different.
3.1 Tools and Methods for Capturing Tree Geometries Above the Ground
Documenting the topological geometry of branches consists of 3 steps. (1) By LiDAR or photogrammetry scanning [11], a point cloud model of the visible compartment (trunk, branch, aerial root and leaf) can be created. (2) To abstract the topological skeleton of branches out of the point cloud, Cornea [12] compared multiple automatic skeletonization methods; L1-medial skeleton [13] is efficient on point cloud that is not over complex containing too large an amount of points; Guo et al. [14] developed an approach to restore a speculative skeleton without segmenting point clouds into branches and leaves; Wu et al. [15] then achieved an accurate median-axis skeleton abstraction based on the foliage–woody separation by convolutional neural networks [16]; Liu et al. [17] developed a neural network to reconstruct tree geometry out of a point cloud robust to noise, outliers and incompleteness; besides, voxel thinning is able to preserve the precise topological structure of tree branches while estimating approximate diameters of branches during the thinning process [18]. (3) After skeletonization, pipelines can be generated by cylinder fitting. Some tools have already integrated all these steps to reconstruct quantitative structural models (QSMs) of trees out of point cloud: Raumonen [19] developed their own method using “cover sets” to reconstruct tree topology (an example is shown if Figure 4); similar to the cover-set idea, PypeTree [20] rebuilt trunk and branches by their “segment” based on skeleton curves in python and then used semi-supervised adjustment to correct the errors; SimpleTree [21] built cylindrical tree models in C++ by voxel-grid and Euclidean clustering, it also developed crown calculation tool to estimate canopy volume; cylinder fitting was proved robust in shape fitting for tree trunk and branches [22]; AdTree [23] was another skeleton related approach fitting cylinders to point cloud model of a single tree.
Figure 4. Data abstraction of a tree at TUM campus in Munich with the tool TreeQSM developed by Raumonen et al. [19].
Voxel-based descriptions of tree canopies were first developed to represent only the volume [24]. To derive LAD at the voxel scale, the Monte-Carlo simulation is a classic approach [25]. Béland, Widlowski [26] proposed the VoxLAD model instead of ray tracing algorithms, enabling the estimation from discrete returning data from any type of TLS; Wu, Phinn [27] used this method on multiple species of fruit trees; Hosoi and Omasa [28] developed voxel-based canopy profiling method to estimate LAD in voxels. The precision according to the voxel size is assessed by Li and Dai [29].
3.2 Tools for Detecting Roots Underground
To detect roots underground, ground-penetrating radar is required. It transmits and receives electromagnetic waves. The returning signals indicate boundaries of overlaying objects [30]. The precision and maximum depth depend on the wave frequency and soil type. Inhomogeneous soil, commonly seen in urban areas, usually produces poor results. New methods like multi-electrode resistivity imaging used for detecting decay inside trunks [31] can also show a rough distribution of roots underground, but they are not yet applicable in practice.
4. How to Transfer a TIM Model into L-System
L-system is a string rewriting mechanism. It recursively replaces certain parts of the strings according to given rules. In this way, it produces patterns with self-similarity, thus being widely used for modeling plants [7].
Interpreting pipelines into a L-system language such as language XL [32] has three steps: (1) translating each pipeline (see Figure 5); (2) combining branches in the order of topology (see Figure 6); (3) adding defined tree organs to the model.
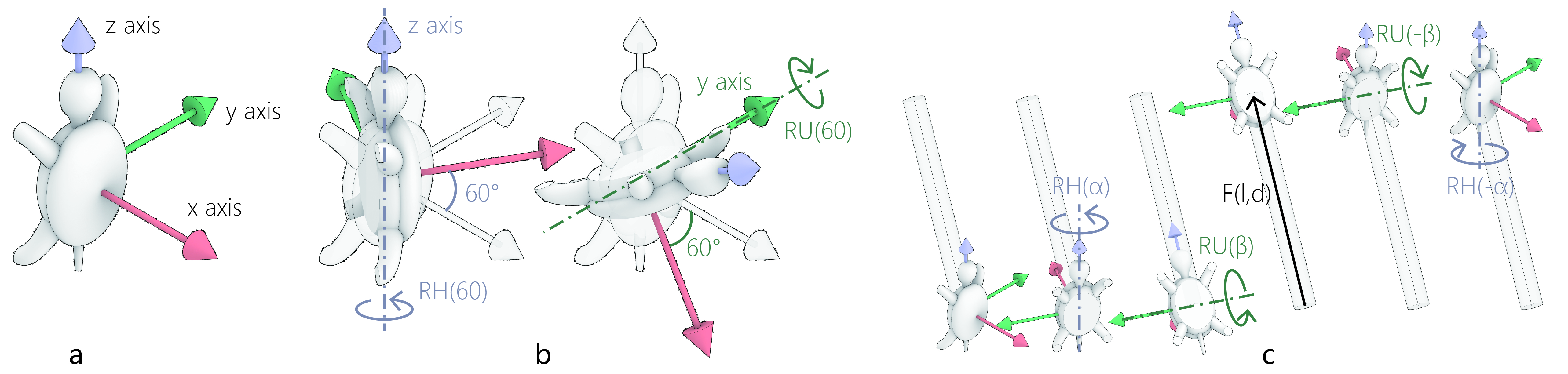
Figure 5. Turtle state and Euler rotation in the interpretation of pipelines. (a) the initial heading of the turtle in Language XL; (b) rotating the turtle’s heading along its z and y axis with command RH (α) and RU (β), respectively; (c) visualization of one set of commands for describing one single pipeline.
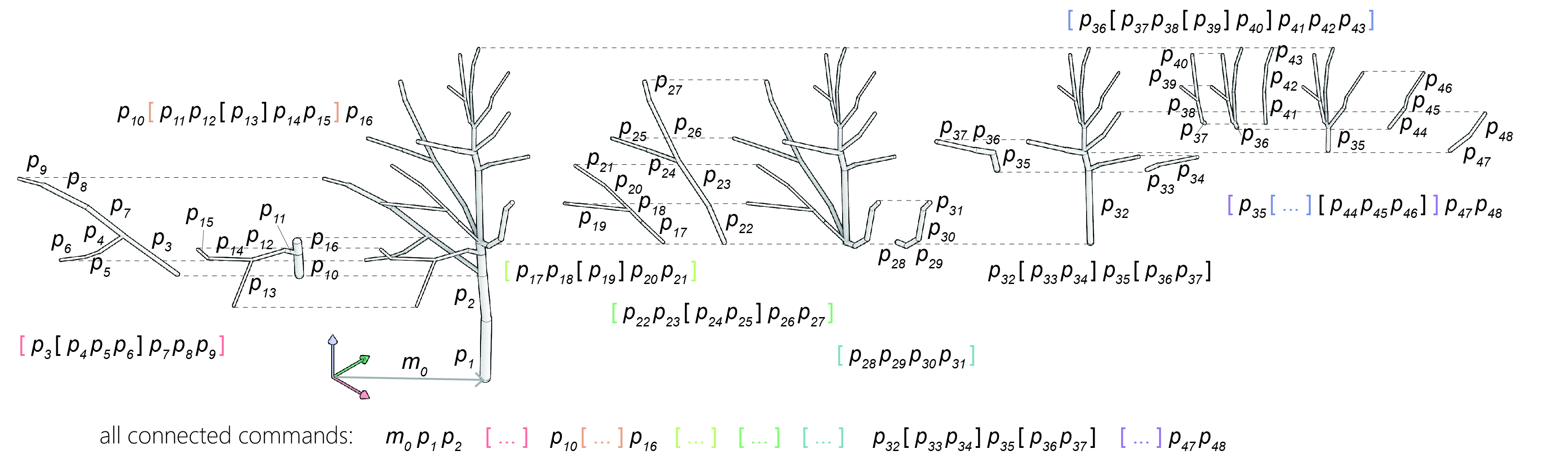
Figure 6. Connecting all turtle commands to represent the topology of a tree.
The third step is to enable functions like tree growth in Functional Structural Plant Model (FSPM) by adding defined tree organs and parameters to the string. Different simulation purpose requires different definitions and parameters of these organs. Commonly used ones in FSPM are internode, bud, leaf and so on. Buds, flowers, and fruits, due to their very targeted use, are not documented in the current TDS. Therefore, such organs must be manually inserted into the interpreted strings for FSPMs. Even parameters for the internodes except its geometry are not included (i.e., the sap flow rate through the internode) in TDS neither. They can be documented as additional attributes on every geometric element of TIM and then be interpreted into the strings (i.e., “F(l,d,sapflow rate,other additional attributes…)”). Some of the organ defining processes like inserting bud could be, in the future, replaced by programs that make automatic tree organ cognition.
5. Vision of TIM
A design workflow in a project is as important as the design itself. Achieving multifunctional use of urban trees requires more than datasets and methods. Designers and planners must be able to engage in tree planning by taking advantage of digital tools. As voxels are intuitive in showing spatial distributions of leaves and are used in environmental simulations [33], researchers hold a strong vision that designers could design tree canopies and their rough density in voxels for urban space (see Figure 7). This design serves as a target parameter for tree status in the long term (i.e., 10–20 years).
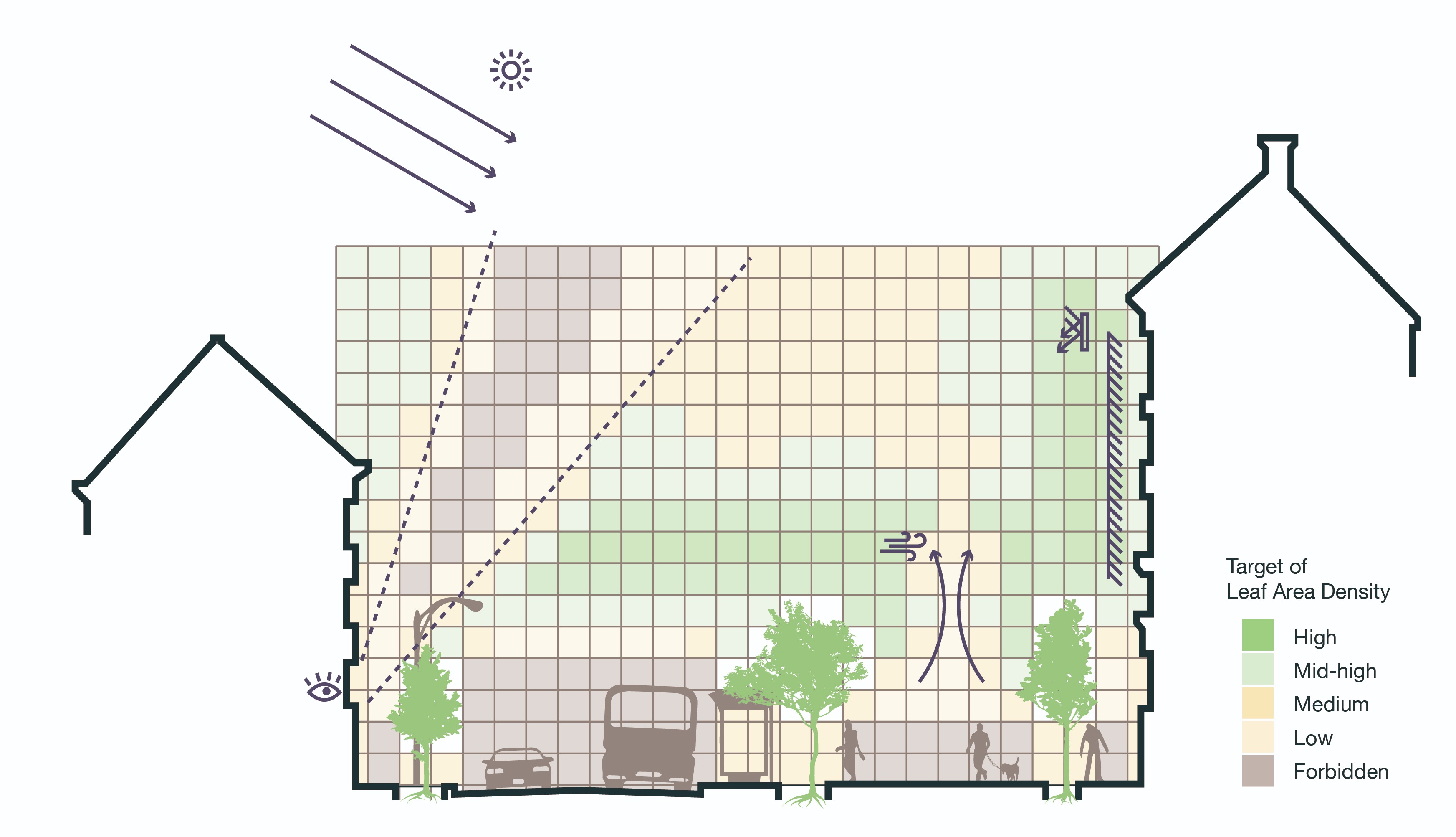
Figure 7. An example of designing street green space with voxels containing leaf area density: the north-facing apartments have access to sunlight and sky view; the motorway and south-facing façade are shaded against high radiation; ventilation at the sidewalk is not blocked. Designers can set target values such as rough leaf area densities to these voxels for various design purposes.
This entry is adapted from the peer-reviewed paper 10.3390/f13111955
References
- Belcher, R.N.; Fornasari, L.; Menz, S.; Schroepfer, T. Birds use of vegetated and non-vegetated high-density buildings—A case study of Milan. J. Urban Ecol. 2018, 4, juy001.
- IngenhovenArchitects. Ingenhoven Architects—Kö-Bogen II Düsseldorf. 2020. Available online: https://www.ingenhovenarchitects.com/projekte/weitere-projekte/koe-bogen-ii-duesseldorf/description (accessed on 29 June 2022).
- Ludwig, F.; Schwertfreger, H.; Storz, O. Living systems: Designing growth in Baubotanik. Archit. Des. 2012, 82, 82–87.
- Rötzer, T.; Moser-Reischl, A.; Rahman, M.A.; Grote, R.; Pauleit, S.; Pretzsch, H. Modelling urban tree growth and ecosystem services: Review and perspectives. Prog. Bot. 2020, 82, 405–464.
- Detter, A.; Rust, S. Aktuelle Untersuchungsergebnisse zu Zugversuchen. Jahrbuch der Baumpflege; Haymarket Media: Braun-schweig, Germany, 2013, 87–100.
- Peltola, H. M. (2006). Mechanical stability of trees under static loads. American journal of botany, 93(10), 1501-1511.
- Prusinkiewicz, P.; Lindenmayer, A. The Algorithmic Beauty of Plants; Springer Science & Business Media: New York, NY, USA, 2012.
- Godin, C. Representing and encoding plant architecture: A review. Ann. For. Sci. 2000, 57, 413–438.
- Messner, J.; Anumba, C.; Dubler, C.; Goodman, S.; Kasprzak, C.; Kreider, R.; Leicht, R.; Saluja, C.; Zikic, N. BIM Project Execution Planning Guide (v. 2.2); Computer Integrated Construction Research Program, Pennsylvania State University: University Park, PA, USA, 2019.
- Lasseck, M. Image-based Plant Species Identification with Deep Convolutional Neural Networks. In CLEF (Working Notes), CEUR Workshop Proceedings Vol-1866 ; Dublin, Ireland, September 11-14, 2017.
- St‐Onge, B.; Vega, C.; Fournier, R.A.; Hu, Y. Mapping canopy height using a combination of digital stereo‐photogrammetry and lidar. Int. J. Remote Sens. 2008, 29, 3343–3364.
- Cornea, N.D.; Silver, D.; Min, P. Curve-skeleton properties, applications, and algorithms. IEEE Trans. Vis. Comput. Graph. 2007, 13, 530.
- Huang, H.; Wu, S.; Cohen-Or, D.; Gong, M.; Zhang, H.; Li, G.; Chen, B. L1-medial skeleton of point cloud. ACM Trans. Graph. 2013, 32, 65:1–65:8.
- Guo, J.; Xu, S.; Yan, D.-M.; Cheng, Z.; Jaeger, M.; Zhang, X. Realistic procedural plant modeling from multiple view images. IEEE Trans. Vis. Comput. Graph. 2018, 26, 1372–1384.
- Wu, B.; Zheng, G.; Chen, Y.; Yu, D. TreeSke: A Structural-Lossless Skeleton Extraction Method for Point Cloud Data of Canopy Woody Materials. Preprint. Available online: https://www.researchsquare.com/article/rs-78239/v1 (accessed on 13 November 2022) ..
- Jin, S.; Su, Y.; Gao, S.; Wu, F.; Ma, Q.; Xu, K.; Hu, T.; Liu, J.; Pang, S.; Guan, H.; et al. Separating the structural components of maize for field phenotyping using terrestrial LiDAR data and deep convolutional neural networks. IEEE Trans. Geosci. Remote Sens. 2019, 58, 2644–2658.
- Liu, Y.; Guo, J.; Benes, B.; Deussen, O.; Zhang, X.; Huang, H. TreePartNet: Neural decomposition of point clouds for 3D tree reconstruction. ACM Trans. Graph. 2021, 40, 1–16.
- Middleton, W.; Shu, Q.; Ludwig, F. Representing living architecture through skeleton reconstruction from point clouds. Sci. Rep. 2022, 12, 1–13.
- Raumonen, P.; Kaasalainen, M.; Åkerblom, M.; Kaasalainen, S.; Kaartinen, H.; Vastaranta, M.; Holopainen, M.; Disney, M.; Lewis, P. Fast automatic precision tree models from terrestrial laser scanner data. Remote Sens. 2013, 5, 491–520.
- Delagrange, S., C. Jauvin, and P. Rochon, PypeTree: A tool for reconstructing tree perennial tissues from point clouds. Sensors 2014, 14, 4271–4289.
- Hackenberg, J.; Spiecker, H.; Calders, K.; Disney, M.; Raumonen, P. SimpleTree—An efficient open source tool to build tree models from TLS clouds. Forests 2015, 6, 4245–4294.
- Åkerblom, M.; Raumonen, P.; Kaasalainen, M.; Casella, E. Analysis of geometric primitives in quantitative structure models of tree stems. Remote Sens. 2015, 7, 4581–4603.
- Du, S.; Lindenbergh, R.; Ledoux, H.; Stoter, J.; Nan, L. AdTree: Accurate, detailed, and automatic modelling of laser-scanned trees. Remote Sens. 2019, 11, 2074.
- Vonderach, C.; Voegtle, T.; Adler, P. Voxel-based approach for estimating urban tree volume from terrestrial laser scanning data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, 451–456.
- Van der Zande, D.; Stuckens, J.; Verstraeten, W.W.; Muys, B.; Coppin, P. Assessment of light environment variability in broadleaved forest canopies using terrestrial laser scanning. Remote Sens. 2010, 2, 1564–1574.
- Béland, M.; Widlowski, J.-L.; Fournier, R.A. A model for deriving voxel-level tree leaf area density estimates from ground-based LiDAR. Environ. Model. Softw. 2014, 51, 184–189.
- Wu, D.; Phinn, S.; Johansen, K.; Robson, A.; Muir, J.; Searle, C. Estimating changes in leaf area, leaf area density, and vertical leaf area profile for mango, avocado, and macadamia tree crowns using terrestrial laser scanning. Remote Sens. 2018, 10, 1750.
- Hosoi, F.; Omasa, K. Voxel-based 3-D modeling of individual trees for estimating leaf area density using high-resolution portable scanning lidar. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3610–3618.
- Li, S.; Dai, L.; Wang, H.; Wang, Y.; He, Z.; Lin, S. Estimating leaf area density of individual trees using the point cloud seg-mentation of terrestrial LiDAR data and a voxel-based model. Remote Sens. 2017, 9, 1202.
- Hruska, J.; Čermák, J.; Šustek, S. Mapping tree root systems with ground-penetrating radar. Tree Physiol. 1999, 19, 125–130.
- Amato, M.; Basso, B.; Celano, G.; Bitella, G.; Morelli, G.; Rossi, R. In situ detection of tree root distribution and biomass by multi-electrode resistivity imaging. Tree Physiol. 2008, 28, 1441–1448.
- Kniemeyer, O.; Buck-Sorlin, G.; Kurth, W. GroIMP as a platform for functional-structural modelling of plants. Frontis, 2007, 22, 43–52.
- Vos, P.E.; Maiheu, B.; Vankerkom, J.; Janssen, S. Improving local air quality in cities: To tree or not to tree? Environ. Pollut. 2013, 183, 113–122.