The Mars Helicopter Scout (MHS) is a planned robotic helicopter that will test the technology to scout interesting targets for study on Mars, and help plan the best driving route for future Mars rovers. The small drone helicopter will be deployed in 2021 from the planned Mars 2020 rover. It is expected to fly up to five times during its 30-day test campaign, early in the rover's mission, as it is primarily a technology demonstration. Each flight will take no more than 3 minutes, at altitudes ranging from 3 m to 10 m above the ground, but it could potentially cover a maximum distance of about 600 m (2,000 ft) per flight. It will use autonomous control and communicate with the Mars 2020 rover directly after each landing. If it works as expected, NASA will be able to build on the design for future Mars missions. MiMi Aung is the project lead. Other team members are AeroVironment Inc., NASA Ames Research Center, and NASA Langley Research Center.
- autonomous control
- technology
- mhs
1. History
NASA's JPL and Caltech have been exploring the potential of sending an airborne scout robot to accompany the Mars 2020 rover, publishing the conceptual design of this helicopter in 2014.[1][2] By mid 2016, $15 million was being requested to keep development of the helicopter on track.[3] By December 2017, engineering models of the vehicle had been tested in a simulated Martian atmosphere[4][5] and models were undergoing testing in the Arctic, but its inclusion in the mission had not yet been approved nor funded.[6]
The United States federal budget announced in March 2018, provided $23 million for the helicopter,[7][8] and it was announced on 11 May 2018 that the helicopter can be developed and tested in time to be included in the Mars 2020 rover mission.[9]
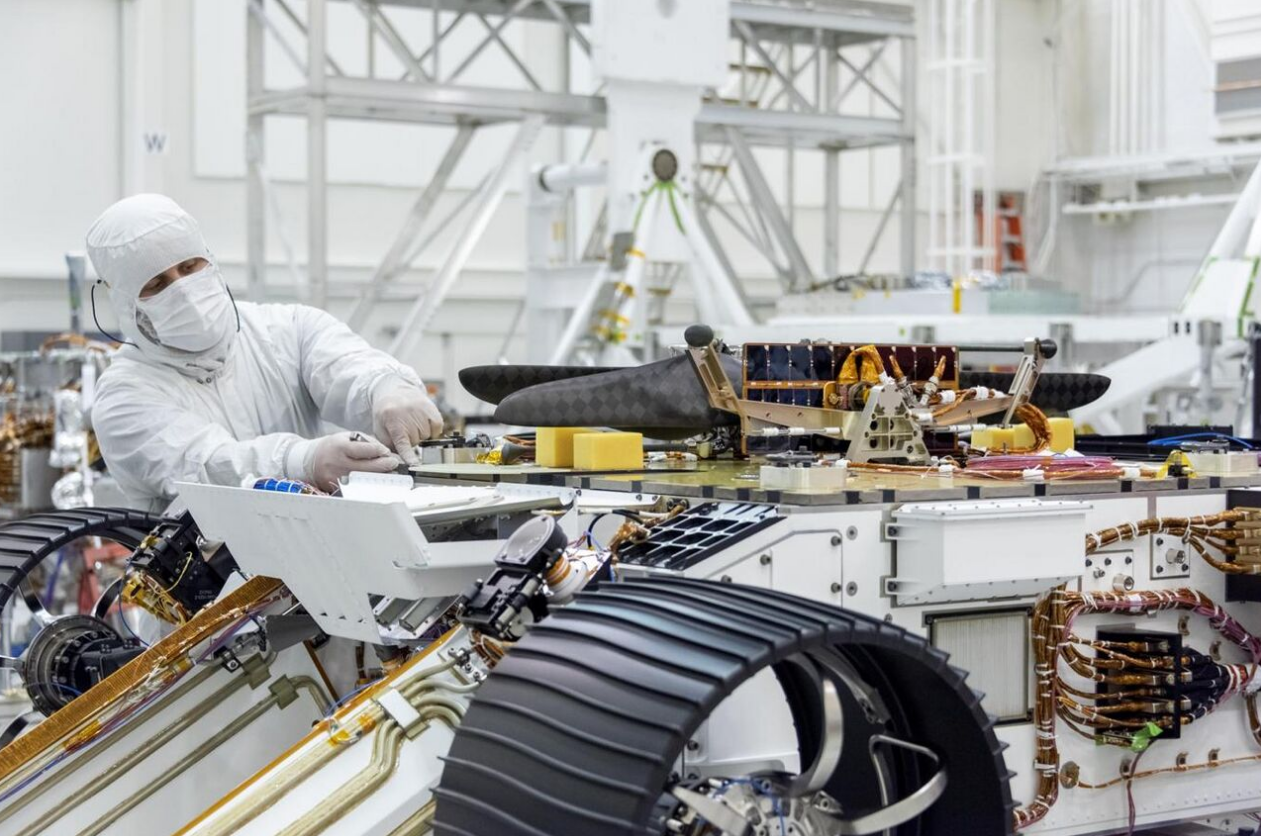
The helicopter underwent extensive flight-dynamics and environment testing,[4][10] and was then mounted on the underside of the rover in August 2019.[11] Its mass is just under 1.8 kg (4.0 lb)[10] and it will make up to 5 flights.[9][12]
2. Objectives
The Mars Helicopter Scout (MHS) is a technology demonstrator by JPL that will assess whether this technology can fly safely, and provide better mapping and guidance that would give future mission controllers more information to help with travel routes planning and hazard avoidance, as well as identifying points of interest for the rover.[13][14][15] The helicopter will provide overhead images with approximately ten times the resolution of orbital images, and would display features that may be occluded from the rover cameras.[16] It is expected that such scouting may enable future rovers to safely drive up to three times as far per sol.[17]
This test will form the foundation on which more capable helicopters can be developed for aerial exploration of Mars and other planetary targets with an atmosphere.[4][13][18]
3. Design
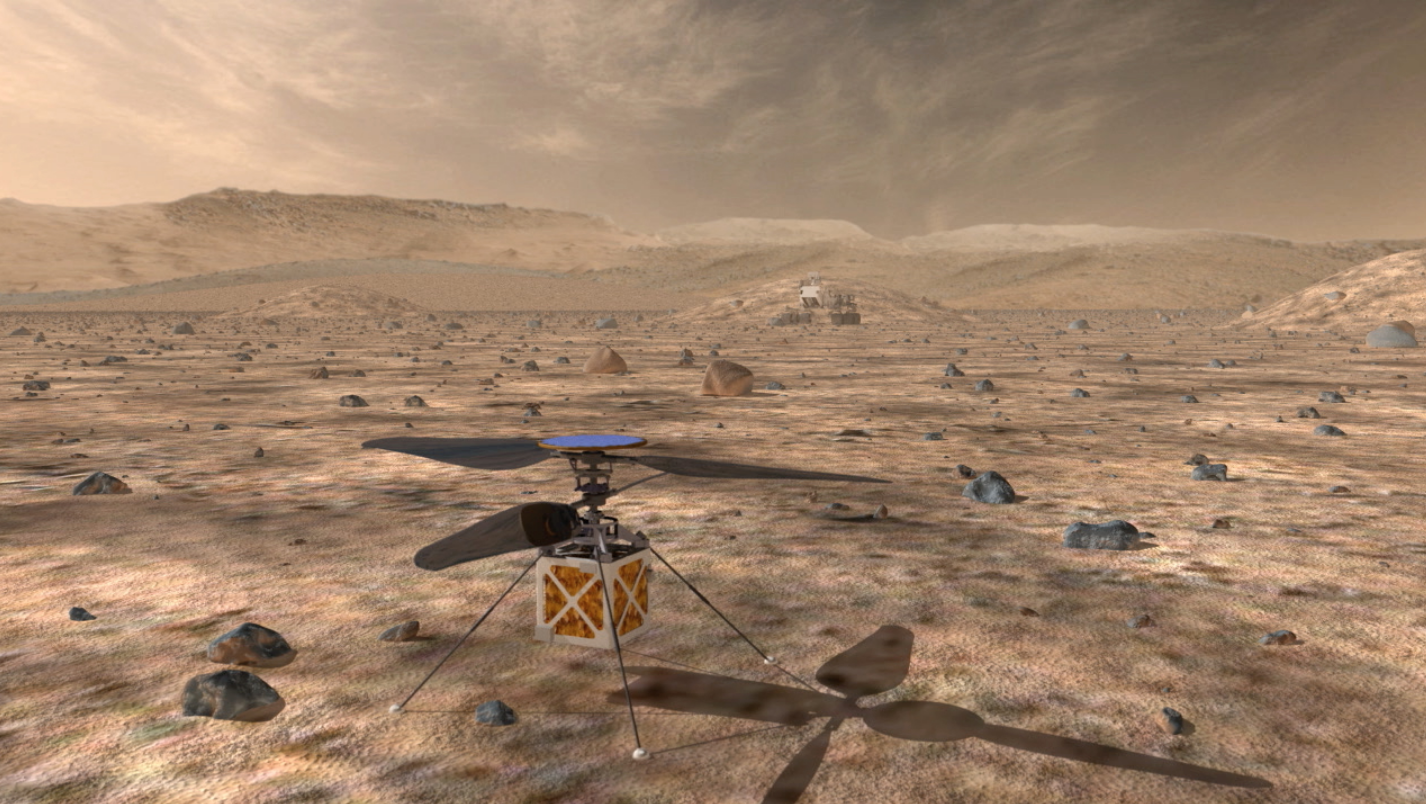
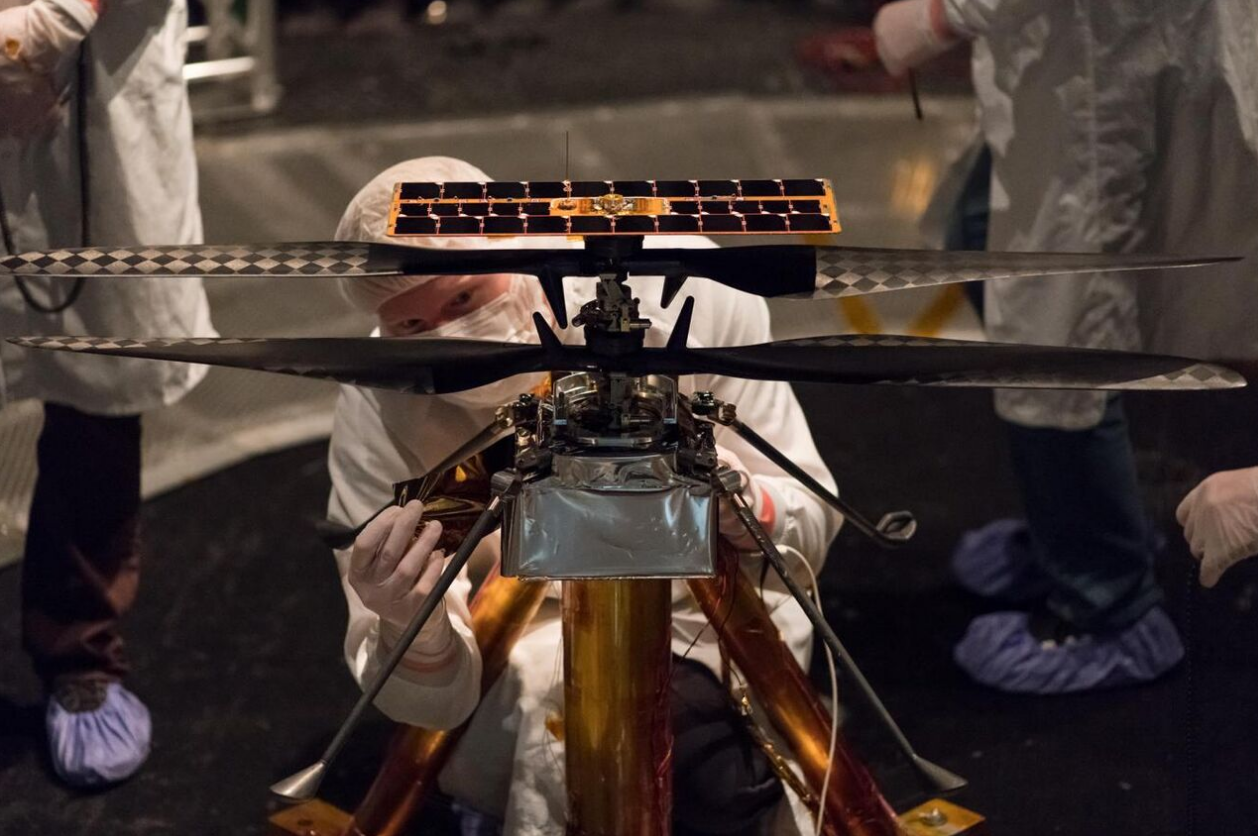
The helicopter uses counter-rotating coaxial rotors about 1.1 m (3 ft 7 in) in diameter. Its payload will be a high resolution downward-looking camera for navigation, landing, and science surveying of the terrain, and a communication system to relay data to the 2020 Mars rover.[19] Although it is an aircraft, it is being constructed as a spacecraft in order to endure the g-force and vibration during launch. It also includes radiation-resistant systems capable of operating in the frigid environment of Mars.
The inconsistent Mars magnetic field precludes the use of a compass for navigation, so it will use a solar tracker camera integrated to JPL's visual inertial navigation system. Some additional inputs include gyros, visual odometry, tilt sensors, altimeter, and hazard detectors.[20] It will use solar panels to recharge its batteries, which are six Sony Li-ion cells with a nameplate capacity of 2 Ah.[4]
The prototype uses the Snapdragon processor from Intrinsyc with a Linux operating system,[4] which also implements visual navigation via a velocity estimate derived from features tracked with a camera.[4] The processor is connected to two flight-control Microcontroller Units (MCU) to perform the needed flight-control functions.[4] Communications with the rover are through a radio link called Zig-Bee, a standard 900 MHz chipset that are mounted in both the rover and helicopter.[4] The communication system is designed to relay data at 250 kbit/s over distances of up to 1,000 m (3,300 ft).[4]
The helicopter will travel to Mars attached to the underside of the rover, and will be deployed to the surface between 60 and 90 Martian days after the landing. Then, the rover will drive approximately 100 m (330 ft) away for the test flights to begin.[21][22]
| Mars Helicopter Scout |
Units/performance[23] |
|---|---|
| Mass | Total: 1.8 kg (4.0 lb)[23] Batteries: 273 g [4] |
| Height | 0.8 m (2 ft 7 in)[5] |
| Coaxial rotor diameter | 1.2 m (3 ft 11 in)[5] |
| Revolutions/min | 1,900 - 2,800 rpm[9] |
| Blade tip speed | < 0.7 Mach |
| Chassis dimension | 14 cm (5.5 in) cube |
| Power | 220 W (battery, solar power charged) |
| Flight time | Up to 90 seconds, once per day |
| Operational time | ~5 flights in ~30 days |
| Maximum range | Flight: 600 m (2,000 ft) Radio: 1,000 m (3,300 ft) |
| Maximum altitude | 400 m (1,300 ft) |
| Maximum speed[1] | Horizontal: 10 m/s (33 ft/s) Vertical: 3 m/s (9.8 ft/s) |
| 2 cameras | High resolution imagery in color. Navigation.[5] |
4. Future
This technology demonstration will form the foundation on which more capable helicopters can be developed for more ambitious missions to planets and moons with an atmosphere.[4][18] The next generation of rotorcraft may be in the range between 5 and 15 kg with science payloads between 0.5 and 1.5 kg. These potential aircraft could have direct communication to an orbiter and may or may not continue to work with a landed asset.[22] Future helicopters could be used to explore special regions with exposed water ice or brines where Earth microbial life could potentially survive.
Mars helicopters may also be considered for fast retrieval of small sample caches back to a Mars ascent vehicle for return to Earth.[4]
5. Gallery
The content is sourced from: https://handwiki.org/wiki/Astronomy:JPL_Mars_Helicopter_Scout
References
- Generation of Mars Helicopter Rotor Model for Comprehensive Analyses. (PDF) Witold J. F. Koning, Wayne Johnson, Brian G. Allan. NASA Rotorcraft. 2018. https://rotorcraft.arc.nasa.gov/Publications/files/Koning_2018_TechMx.pdf
- J. Balaram and P. T. Tokumaru, "Rotorcrafts for Mars Exploration," in 11th International Planetary Probe Workshop, 2014.
- Berger, Eric (24 May 2016). "Four wild technologies lawmakers want NASA to pursue". ARS Technica. https://arstechnica.com/science/2016/05/four-wild-technologies-lawmakers-want-nasa-to-pursue/. Retrieved 24 May 2016.
- Mars Helicopter Technology Demonstrator. (PDF) J. (Bob) Balaram, Timothy Canham, Courtney Duncan, Matt Golombek, Håvard Fjær Grip, Wayne Johnson, Justin Maki, Amelia Quon, Ryan Stern, and David Zhu. American Institute of Aeronautics and Astronautics (AIAA), SciTech Forum Conference; 8–12 January 2018, Kissimmee, Florida. doi:10.2514/6.2018-0023. https://rotorcraft.arc.nasa.gov/Publications/files/Balaram_AIAA2018_0023.pdf
- Helicopter to accompany NASA's next Mars rover to Red Planet. Stephen Clarke, Spaceflight Now. 14 May 2018. https://spaceflightnow.com/2018/05/14/helicopter-to-accompany-nasas-next-mars-rover-to-red-planet/
- Dubois, Chantelle (29 November 2017). "Drones on Mars? NASA Projects May Soon Use Drones for Space Exploration". All About Circuits. https://www.allaboutcircuits.com/news/nasa-projects-may-soon-use-drones-for-space-exploration-mars/.
- NASA Mars exploration efforts turn to operating existing missions and planning sample return. Jeff Foust, Space News. 23 February 2018. http://spacenews.com/nasa-mars-exploration-efforts-turn-to-operating-existing-missions-and-planning-sample-return/
- NASA to decide soon whether flying drone will launch with Mars 2020 rover. Stephen Clarke, Spaceflight Now. 15 March 2018. https://spaceflightnow.com/2018/03/15/nasa-to-decide-soon-whether-flying-drone-will-launch-with-mars-2020-rover/
- Mars Helicopter to Fly on NASA's Next Red Planet Rover Mission. Karen Northon, NASA News. 11 May 2018. https://www.nasa.gov/press-release/mars-helicopter-to-fly-on-nasa-s-next-red-planet-rover-mission
- Agle, AG; Johnson, Alana (28 March 2019). "NASA's Mars Helicopter Completes Flight Tests". NASA. https://www.jpl.nasa.gov/news/news.php?feature=7361. Retrieved 28 March 2019.
- NASA's Mars Helicopter Attached to Mars 2020 Rover. NASA News - JPL. 28 August 2019. https://www.jpl.nasa.gov/news/news.php?feature=7489
- Yes, NASA Is Actually Sending a Helicopter to Mars: Here's What It Will Do. Sarah Lewin, Space. 12 May 2018. https://www.space.com/40570-nasa-sending-helicopter-to-mars.html
- Brown, Dwayne; Wendel, JoAnna; Agle, DC; Northon, Karen (11 May 2018). "Mars Helicopter to Fly on NASA's Next Red Planet Rover Mission". NASA. https://www.nasa.gov/press-release/mars-helicopter-to-fly-on-nasa-s-next-red-planet-rover-mission. Retrieved 11 May 2018.
- Chang, Kenneth. "A Helicopter on Mars? NASA Wants to Try". The New York Times. https://www.nytimes.com/2018/05/11/science/mars-helicopter-nasa.html. Retrieved 12 May 2018.
- Gush, Loren (11 May 2018). "NASA is sending a helicopter to Mars to get a bird's-eye view of the planet - The Mars Helicopter is happening, y'all". The Verge. https://www.theverge.com/2018/5/11/17346414/nasa-mars-2020-helicopter-atmosphere. Retrieved 11 May 2018.
- Helicopter Could be 'Scout' for Mars Rovers. NASA News. 22 January 2015. https://solarsystem.nasa.gov/news/2015/01/22/helicopter-could-be-scout-for-mars-rovers
- Review on space robotics: Toward top-level science through space exploration (PDF). Y Gao, S Chien - Science Robotics, 2017. http://epubs.surrey.ac.uk/841669/1/ScienceRobotics-SpaceRoboticsSurvey%20GaoChien_no%20figure_final.pdf
- Mars Helicopter a new challenge for flight. NASA JPL: Universe Bulletin, July 2018. Accessed: 9 August 2018. https://www.jpl.nasa.gov/universe/archive/universe1807.pdf
- Volpe, Richard. "2014 Robotics Activities at JPL" (PDF). Jet Propulsion Laboratory. https://www-robotics.jpl.nasa.gov/publications/Richard_Volpe/isairas%202014%20paper,%20volpe,%20v8.pdf. Retrieved 1 September 2015.
- Heading Estimation via Sun Sensing for Autonomous Navigation. Parth Shah. 2017. https://thesis.library.caltech.edu/10338/1/Parth_Shah_2017Thesis.pdf
- "NASA's Mars Helicopter: Small, Autonomous Rotorcraft To Fly On Red Planet". Shubham Sharma, International Business Times. 14 May 2018. http://www.ibtimes.com/nasas-mars-helicopter-small-autonomous-rotorcraft-fly-red-planet-2680575
- Mars Helicopter a new challenge for flight. Universe - JPL - July 2018". Accessed: 20 July 2018. https://www.jpl.nasa.gov/universe/archive/universe1807.pdf
- Mars Helicopter Scout. video presentation at Caltech. https://www.uasvision.com/2016/09/06/nasa-chooses-helicopter-for-mars-drone/