Labor shortage and increasing labor cost are serious problems in today’s society. With the concept of Industry 5.0, it is imperative to promote industrial transformation and accelerate the automation and intelligent development of equipment in order to reduce the pressure brought by the rapid rise in labor costs, so more and more intelligent equipment is used in factories and storage environments. Nowadays, the status of logistics equipment is increasing, and forklifts, as the main force of logistics handling equipment, have been widely used in many fields, such as factories, ports, and warehouses. However, as the requirements of the operating environment continue to increase, the handling equipment can no longer be operated by human hands, especially in special environments, such as high temperature, and hazardous and explosive environments. Along with the development of driverless technology, forklifts are also slowly approaching advanced technologies, such as intelligent identification, wireless transmission, and autonomous navigation and positioning. Intelligent forklifts can enhance the compound ability of forklifts, improve the overall operation level of forklifts, and gradually add more added value. Therefore, intelligent forklifts are the main development direction of forklifts in the future.
- computer vision and its practical applications
- robotics
- deep learning
1. Introduction
-
Existing methods are more costly for determining whether a pallet is available at a certain location, while the recognition rate is low and also susceptible to interference by environmental factors [1].
-
When the intelligent forklift inserts the pallet, there are problems of high implementation cost [2], low algorithm robustness and insufficient accuracy for the calculation of the relative position between the pallet and the forklift.
-
When controlling the intelligent forklift to insert the pallet after the accurate position is calculated, a fixed control amount is usually used without considering the vehicle running state, which makes the control process deviate and eventually leads to errors in the inserting results [3].
-
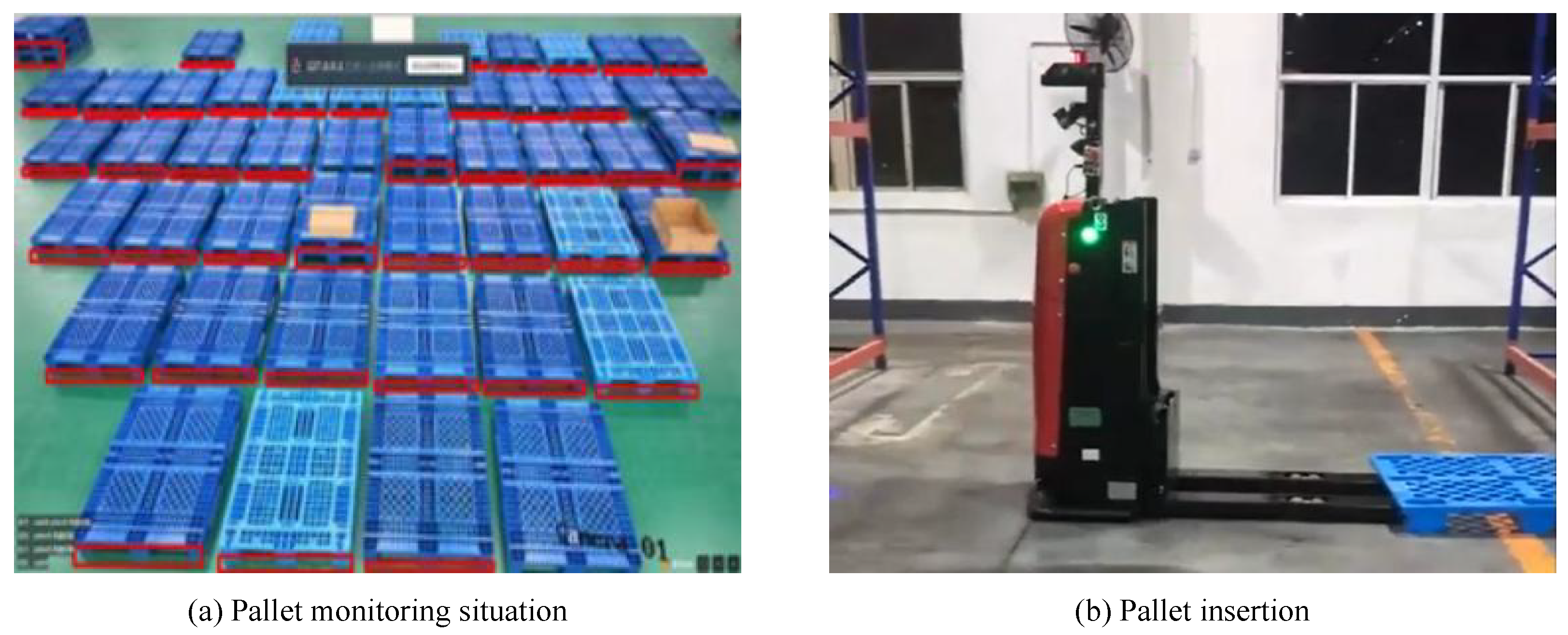
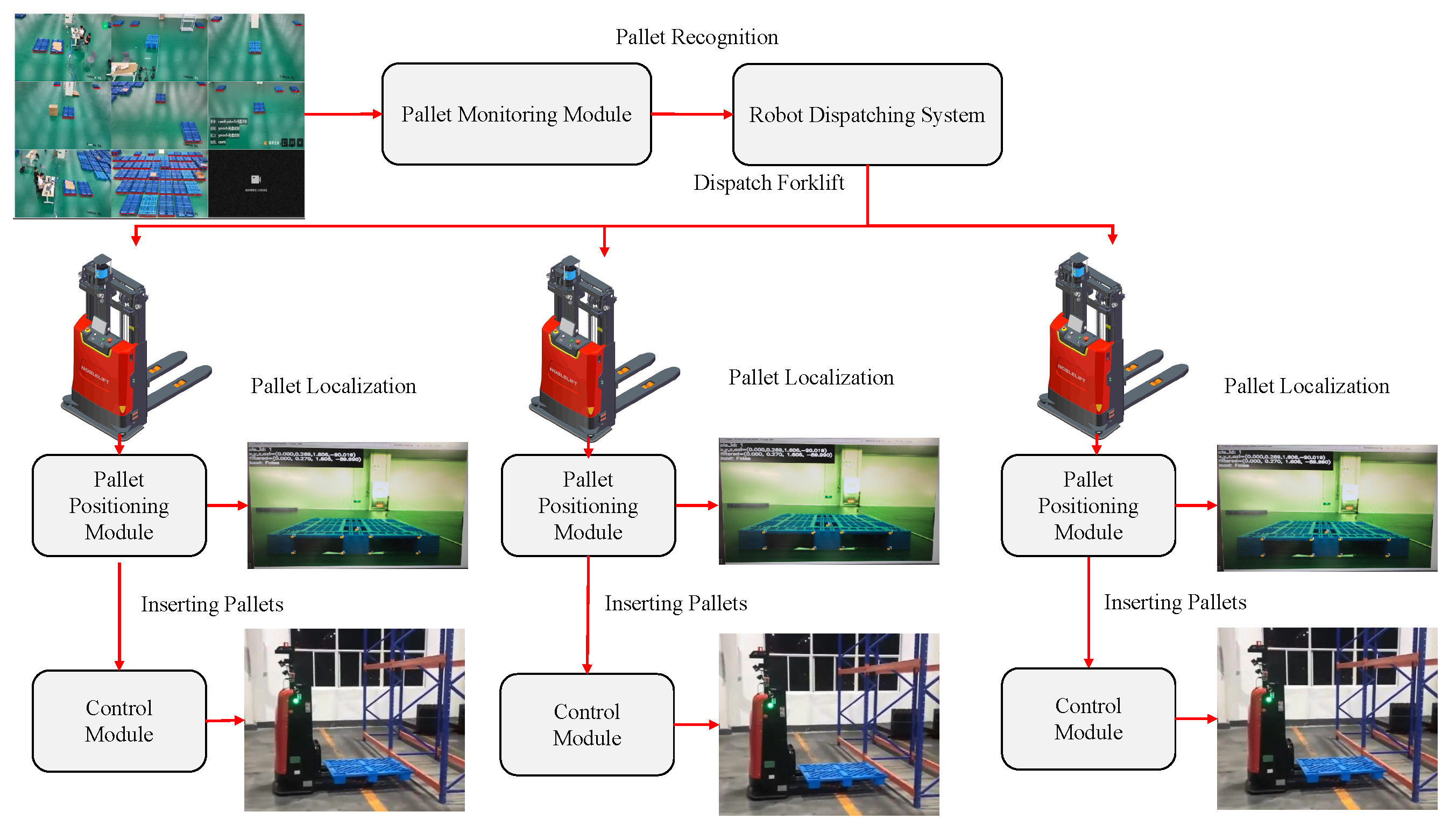
To precisely determine whether there are pallets to be transported in the pallet storage area, the researchers employ a Yolov5-based [4] pallet monitoring system and small target detection module, and its accuracy rate reaches more than 99.5%.
-
To ensure that the final pallet insertion accuracy is within 6 mm, the researchers calculate the real-time pallet position in relation to the intelligent forklift using the pallet position recognition system based on 3D Hough network [5].
-
The researchers present a high-precision tracing control approach for intelligent forklifts in order to increase the control accuracy, and the docking results obtained from 1000 experiments have an error of no more than 6 mm.
2. Pallet Monitoring, Pallet Position Recognition, and Intelligent Forklift Control
2.1. Pallet Monitoring
2.2. Pallet Position Recognition
2.3. Forklift Precision Control Algorithm
3. Intelligent Forklift Cargo Precision Transfer System
This entry is adapted from the peer-reviewed paper 10.3390/s22218437
References
- Wu, C.H.; Tsang, Y.P.; Lee, C.K.M.; Ching, W.K. A Blockchain-IoT Platform for the Smart Pallet Pooling Management. Sensors 2021, 21, 6310.
- Motroni, A.; Buffi, A.; Nepa, P.; Pesi, M.; Congi, A. An Action Classification Method for Forklift Monitoring in Industry 4.0 Scenarios. Sensors 2021, 21, 5183.
- Lamooki, S.R.; Cavuoto, L.A.; Kang, J. Adjustments in Shoulder and Back Kinematics during Repetitive Palletizing Tasks. Sensors 2022, 22, 5655.
- Zhu, X.; Lyu, S.; Wang, X.; Zhao, Q. TPH-YOLOv5: Improved YOLOv5 based on transformer prediction head for object detection on drone-captured scenarios. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Virtual, 11–17 October 2021; pp. 2778–2788.
- Liebelt, J.; Schmid, C.; Schertler, K. Viewpoint-independent object class detection using 3d feature maps. In Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 1–8.
- Hussain, M.; Al-Aqrabi, H.; Munawar, M.; Hill, R.; Alsboui, T. Domain Feature Mapping with YOLOv7 for Automated Edge-Based Pallet Racking Inspections. Sensors 2022, 22, 6927.
- Crețu-Sîrcu, A.L.; Schiøler, H.; Cederholm, J.P.; Sîrcu, I.; Schjørring, A.; Larrad, I.R.; Berardinelli, G.; Madsen, O. Evaluation and Comparison of Ultrasonic and UWB Technology for Indoor Localization in an Industrial Environment. Sensors 2022, 22, 2927.
- Li, Y.Y.; Chen, X.H.; Ding, G.Y.; Wang, S.; Xu, W.C.; Sun, B.B.; Song, Q. Pallet detection and localization with RGB image and depth data using deep learning techniques. In Proceedings of the 2021 6th International Conference on Automation, Control and Robotics Engineering (CACRE), Dalian, China, 15–17 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 306–310.
- Joo, K.J.; Pyo, J.W.; Ghosh, A.; In, G.G.; Kuc, T.Y. A pallet recognition and rotation algorithm for autonomous logistics vehicle system of a distribution center. In Proceedings of the 2021 21st International Conference on Control, Automation and Systems (ICCAS), Jeju, Korea, 12–15 October 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1387–1390.
- Borstell, H.; Kluth, J.; Jaeschke, M.; Plate, C.; Gebert, B.; Richter, K. Pallet monitoring system based on a heterogeneous sensor network for transparent warehouse processes. In Proceedings of the 2014 Sensor Data Fusion: Trends, Solutions, Applications (SDF), Bonn, Germany, 8–10 October 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–6.
- Garibott, G.; Masciangelo, S.; Ilic, M.; Bassino, P. Robolift: A vision guided autonomous fork-lift for pallet handling. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS’96, Osaka, Japan, 8 November 1996; IEEE: Piscataway, NJ, USA, 1996; Volume 2, pp. 656–663.
- Garibotto, G.; Masciangelo, S.; Bassino, P.; Ilic, M. Computer vision control of an intelligent forklift truck. In Proceedings of the Conference on Intelligent Transportation Systems, Boston, MA, USA, 12 November 1997; IEEE: Piscataway, NJ, USA, 1997; pp. 589–594.
- Minav, T.A.; Laurila, L.I.; Pyrhönen, J.J. Self-Tuning-Parameter Fuzzy PID Speed Controller Performance in an Electro-Hydraulic Forklift with Different Rule Sets. 2010. Available online: https://www.researchgate.net/profile/Tatiana-Minav/publication/260952145_Self-Tuning-Parameter_Fuzzy_PID_Speed_Controller_Performance_in_an_Electro-Hydraulic_Forklift_with_Different_Rule_Sets/links/5540a17a0cf2736761c280c2/Self-Tuning-Parameter-Fuzzy-PID-Speed-Controller-Performance-in-an-Electro-Hydraulic-Forklift-with-Different-Rule-Sets.pdf (accessed on 9 October 2022).
- Jiang, Z.; Xiao, B. Electric power steering system control strategy based on robust H control for electric forklift. Math. Probl. Eng. 2018, 2018, 7614304.