1. Traditional De-Handing Methods and Challenges
Banana de-handing is the action of separating the banana hand (fruit) from the bunch stalk (stalk). Traditionally, workers use a simple cutting tool to cut the node one by one along the central axis of bunch stalk from the first hand to the last/end hand to complete the task of de-handing whole banana bunches, as shown in
Figure 1. A banana bunch has complex morphological features. The banana hands grow and distribute nonlinearly in both the axial and circumferential directions of the bunch stalk
[1]. The overall quality of the bunch is varied and the fruit is easily mechanically damaged.
Figure 1. Manual de-handing mode of banana bunches using a simple cutting tool.
Manual de-handing is labor-intensive and physically challenging. Not only does the de-handing quality vary due to workers’ skills and experience, but repetitive motion in a small operating space will cause potential hazards to workers’ health that cannot be ignored
[2]. In addition, some de-handed banana hands do not meet the quality requirements for fresh market consumption, and therefore they are usually subjected to secondary cutting, which inevitably increases the labor use and production cost. The current manual de-handing mode, therefore, hinders the sustainability of banana postharvest operation and the entire industry. The banana industry urgently needs to transform from the traditional de-handing mode/technique to a modern mechanical de-handing operation.
2. Mechanical De-Handing
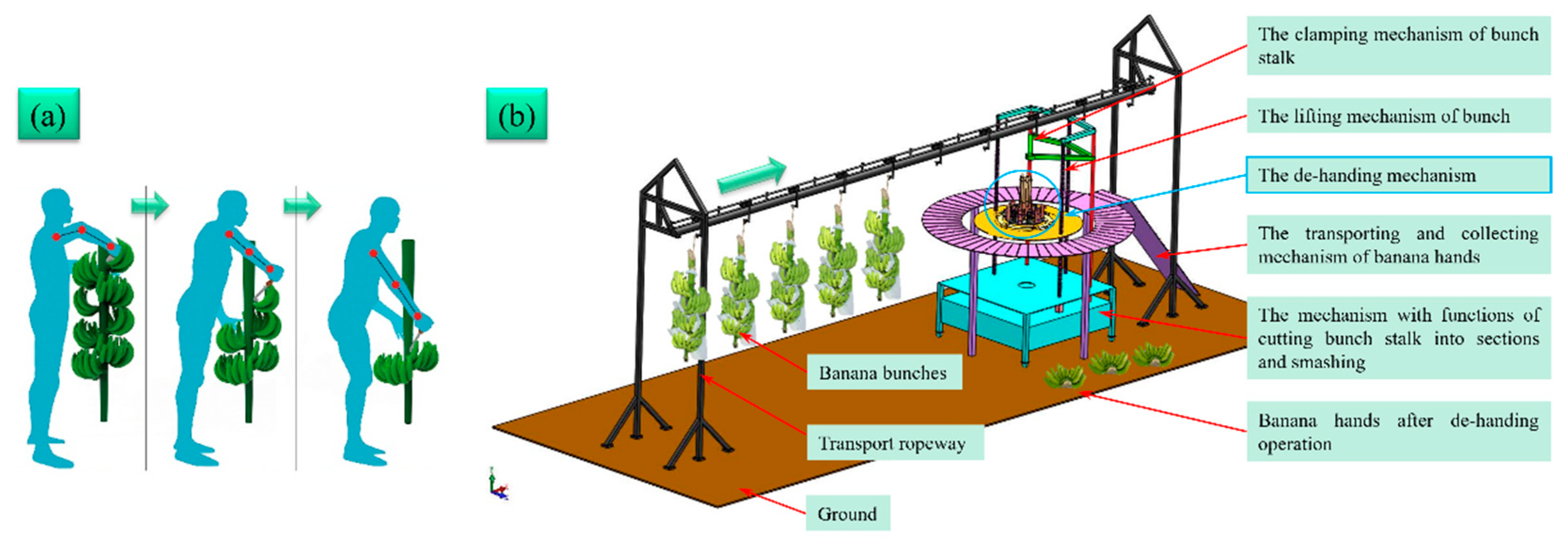
There have been some efforts in developing mechanical de-handing techniques to replace manual work. In order to effectively connect the cableway transportation and the cleaning of the banana hands, the mechanical de-handing equipment usually includes the clamping mechanism of bunch stalk, the lifting mechanism for the bunch, the de-handing mechanism, the collection mechanism for banana hands and the crushing mechanism for bunch stalk, as shown in Figure 2. Before working, the banana farmer places the de-handing machine at the bottom of the ropeway, hangs the banana bunches picked from orchards on the transportation ropeway and gradually approaches the de-handing machine. The position of the bunch closest to the de-handing machine is slightly adjusted, so that its central axis basically coincides with the center of the machine. Then the clamping mechanism is adjusted to the top of bunch stalk, and the de-handing mechanism to the first banana hand at the bottom of bunch stalk. Finally, the liftable legs of the de-handing machine are adjusted to locate the flexible conveyor belt below the de-handing mechanism, so as to complete the preparatory work for the de-handing operation.
Figure 2. Schematic diagram of manual de-handing
[2] (
a); and virtual prototype of mechanical de-handing systems
[3] (
b).
When the banana bunches hanging on the transportation ropeway are transported from left to right, the clamping mechanism clamps the bunch stalk, and then the de-handing mechanism completes the cutting operation of the first banana hand. In the process of de-handing from bottom of the bunch to top, the diameter of the bunch stalk gradually increases, the profiling cutters of the de-handing mechanism move radially to adapt to the changing diameter of the stalk, and then the de-handing is complet4d hand by hand in the bunch. The remaining bunch stalks fall into the cutting and pulverizing mechanism at the bottom of the de-handing machine and are cut and pulverized on the spot, which is convenient for the subsequent unified operation of returning the stalks to the field. After the de-handing work is over, the flexible conveyor belt and the collection mechanism of banana hands are put away, and the de-handing machine is moved to the workshop to prepare for the next job.
The de-handing mechanism is an important part of the de-handing machine and it is the core of realizing the banana de-handing operation. Since the diameters and curvatures of the same bunch stalk where banana hands grow are different, the above parameters are also different between different bunch stalks. Therefore, self-adaptive profiling performance of the cutting tool in the de-handing mechanism, with regards to a bunch stalk with irregular geometric shapes, directly determines the success rate of de-handing and the incision quality of the banana hand, and also indirectly affects the smoothness of the de-handing operation and the fruit quality of the banana hand. The chopped banana hands and the fruit with mechanical damage cannot be stored and sold for fresh market consumption. Therefore, this paper provides a detailed analysis and evaluation of the mechanical de-handing cutters and equipment that have been reported so far, and recommendations for future research will be made based on the findings of these studies.
2.1. Circumferentially Rotating Mechanical De-Handing
The banana hands are distributed in the circumferential and axial directions on the bunch stalk; the circumferential angles are different for different bunches and among different banana hands on the same bunch
[1]. Based on this hand configuration, mechanical de-handing methods have been investigated based on circumferential rotation along the bunch stalk. It is noted that the performance of these de-handing mechanisms is assessed based on how well the mechanism avoids cutting into the bunch stalks and banana hands, and avoids damaging the banana fingers.
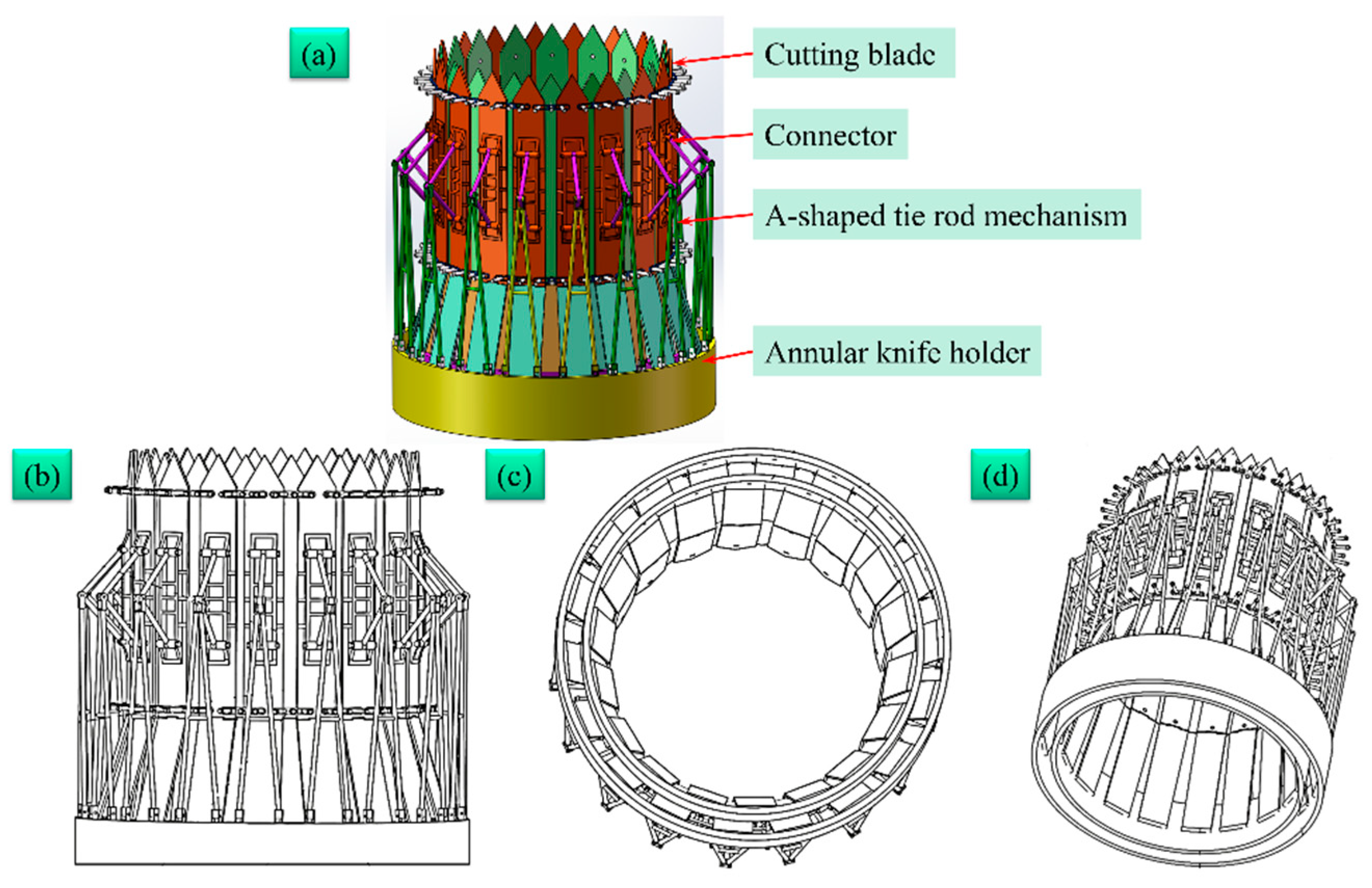
Referring to the working principle of aircraft engines in the aerospace field, Yang et al. designed a banana de-handing cutter with an annular shape and a circle with variable enveloping diameter, as shown in
Figure 3 [4]. This de-handing cutter included double-edged cutting blade, annular knife holder, connector and an A-shaped tie rod mechanism. The cutting blades are installed on the guide groove of the annular knife holder to form an annular enveloping structure capable of wrapping the bunch stalk. The cutting blades were staggered and each blade was divided into upper and lower parts, the upper part a vertical blade body with double edges on the top, and the lower part an outwardly inclined adjustment. Through the adjusting part, the annular enveloping structure can be contracted inward or expanded outward, so as to realize the function of adaptively varying the diameter. In addition, the distance between the annular knife holder and the central axis can be changed by the swinging of the A-shaped tie rod mechanism, thereby ensuring that the shape of the annular enveloping structure is circular or approximately circular. The de-handing cutter can automatically adjust the diameter of the annular enveloping structure according to the change of the diameter of bunch stalk, and can avoid missing cutting nodes.
Figure 3. Rotary de-handing cutter with variable enveloping diameter
[4]. (
a) 3D model, (
b) Front view, (
c) Bottom view, (
d) Side view.
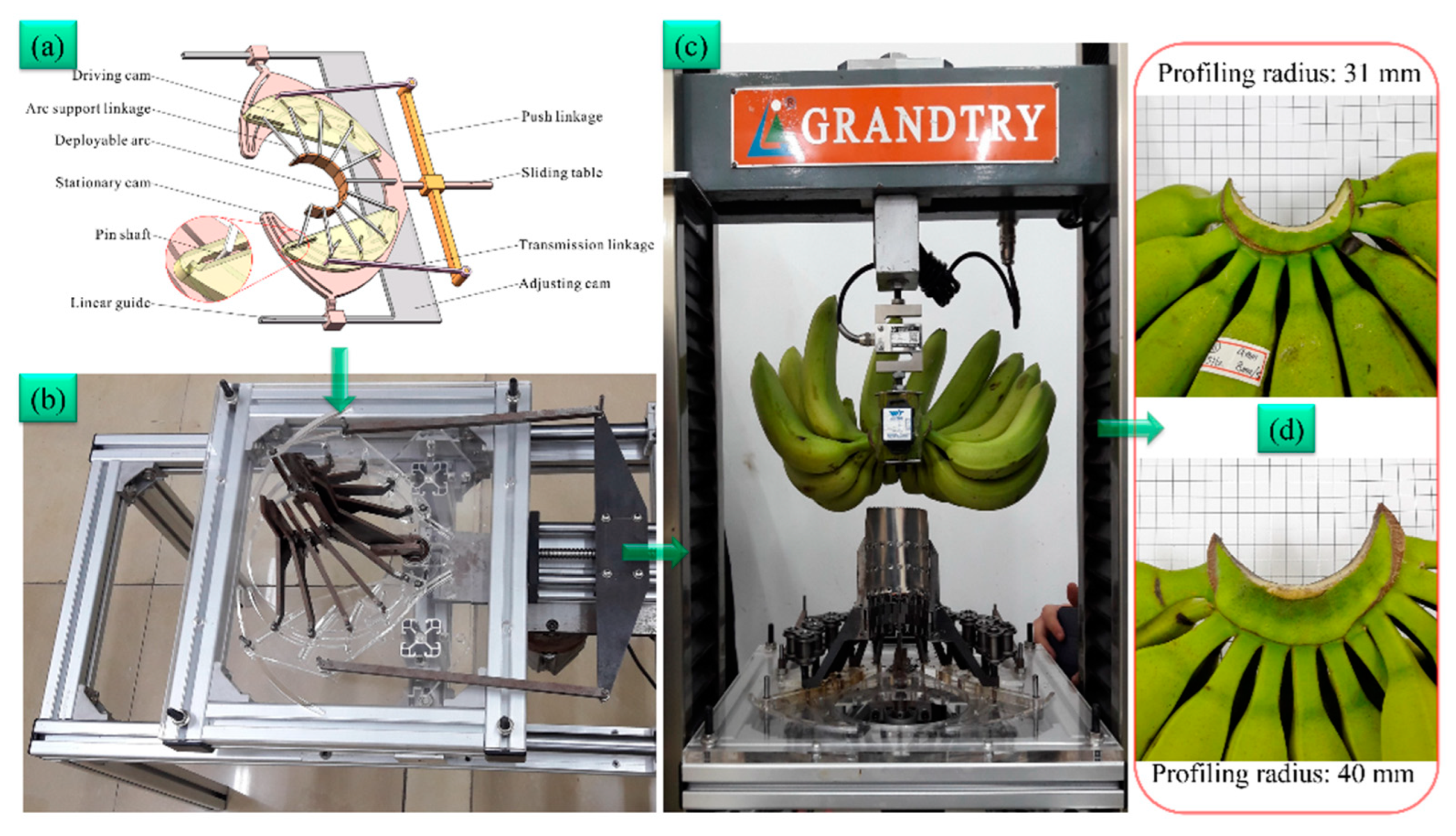
Xu et al. designed a circular arc profiling mechanism based on the working principle of the expandable mechanism, and manufactured a circumferentially expandable banana de-handing platform on this basis
[5]. The circular arc profiling mechanism they proposed was composed of upper, middle and lower layers of plane slides. The upper layer of the mechanism was composed of an expandable arc, arc support rods and driving slides; the middle layer of the mechanism was composed of fixed slides, linear guides, push rods and transmission rods; the lower layer was composed of adjusting slides and linear guides.
Figure 4 shows the schematic diagram of the arc profiling mechanism and the de-handing platform. Herein, the study showed that the de-handing platform has good profiling accuracy (>96.5% within the profiling range of the bunch stalk). In addition, the incision quality of the banana hand after de-handing is greatly improved compared with that of the manual operations. It is significant in guiding the de-handing operation of a single banana hand. However, in commercial banana orchards, banana bunches are usually required to be de-handed continuously throughout the whole bunch to achieve the desired throughput for practical adoption, which could be a direction for future advancement of this technique.
Figure 4. Design and application of the circumferentially expandable de-handing platform. (a) Schematic diagram of the profiling mechanism, (b) Prototype of the de-handing platform, (c) Schematic of an indoor experiment, (d) Incision of banana hands with different profiling radius.
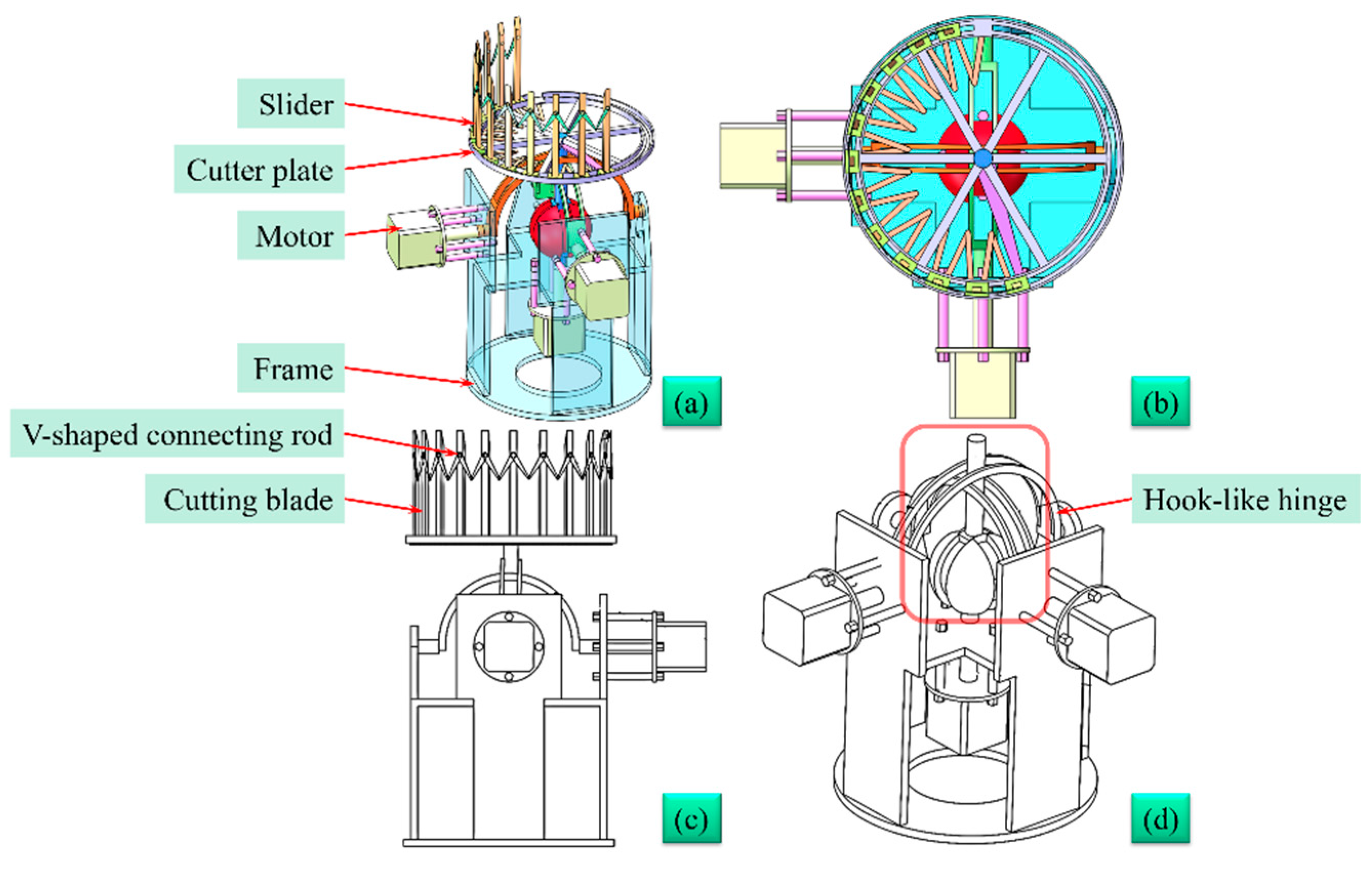
Duan et al. also designed a de-handing platform with self-adaptive function for the banana bunch stalk, which primarily consists of a cutter plate, slider, V-shaped connecting rod, cutting blade, Hook-like hinge, motor and frame, as shown in
Figure 5 [6]. Through the rotation of the Hooke-like hinge, the cutter plate and the cutting blade of the de-handing platform can rotate by a corresponding angle in space, so as to adapt to the change in the curvature of the bunch stalk. Since the rotation angle is controlled by motors, the profiling effect is more precise. In addition, the cutting blade can adjust its expansion area according to the circumferential angle of the growth of the banana hand, so as to complete the cutting operation of banana hands with different circumferential angles. This feature of the de-handing mechanism substantially improved the performance, which was valuable in addressing: (i) the poor profiling effect of existing de-handing mechanisms on the curvature of bunch stalk; (ii) low cutting accuracy of the cutting blade in the circumferential direction.
Figure 5. Schematic diagram of de-handing platform that can adapt to variable diameters of bunch stalk. (a) Virtual prototype, (b) Top view, (c) Left view, (d) Axonometric view of key components.
2.2. Mechanical De-Handing with Axial Plunge-Cutting
In addition to the circumferentially rotating mechanisms discussed above, a number of studies have reported on the axial plunge-cutting mechanism for mechanical de-handing along the bunch stalk. There is a big difference between the two mechanical de-handing methods. The former realizes the de-handing operation of a single banana hand according to the different circumferential angles of banana hands growing on the bunch stalk. The research focuses on the circumferential profiling design of the cutting tool. The latter is based on the characteristic that the banana hands are staggered along the axial direction on the bunch stalk, and realizes the de-handing operation of all banana hands one by one for the whole bunch. The research focuses on the self-adaptive performance of de-handing equipment to changes in the curvature and diameter of the bunch stalk. Considering the various requirements of the actual de-handing operation in banana orchards, it was found that the axial plunge-cutting mechanical de-handing method along the bunch stalk has more potential for long-term development.
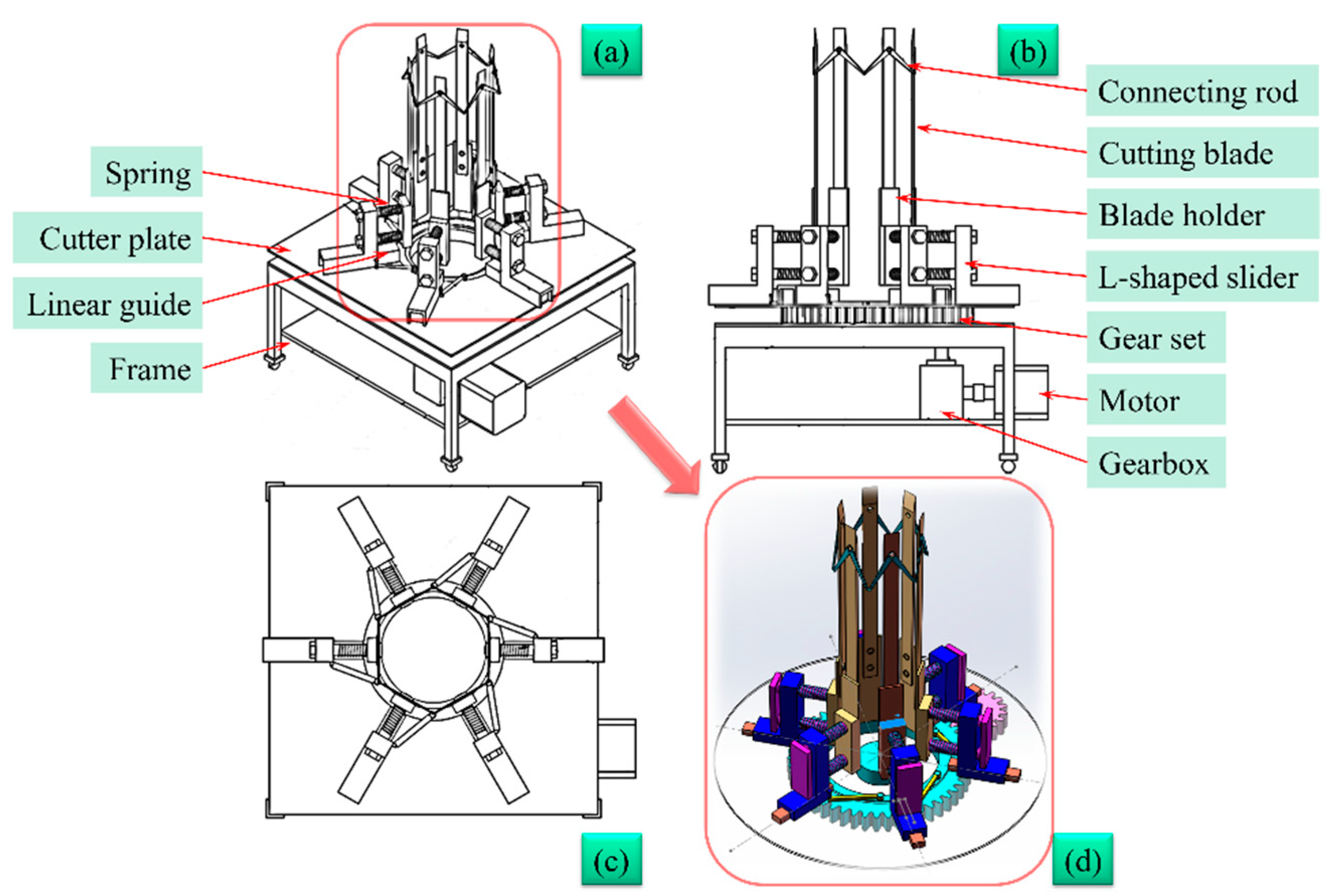
Yang et al. designed a stalk diameter-adaptive de-handing mechanism consisting of frames, motor, cutter plate, gear set, connecting rods, linear guides, L-shaped slider, springs and cutting blades, as shown in
Figure 6 [7]. The gear set is installed under the frame and consists of a driving gear and a corresponding mesh. The linear guides are arranged on the cutter plate in a circular array with the center of the cutter plate as the center of the circle. Each blade holder can move in the radial direction with the varying diameter of the bunch stalk, so as to adjust the expansion area of the annular envelope and profile the bunch stalk. By introducing the crank-slider mechanism, the six cutting blades evenly distributed around the circumference can move synchronously in the radial direction using the gear drive, which provides a reference for the design of the cutter, self-adapting to the varying diameters of the bunch stalk.
Figure 6. A de-handing mechanism that can adapt to changes in the diameter of bunch stalk. (a) Axonometric view, (b) Front view, (c) Top view, (d) Axonometric view of key components.
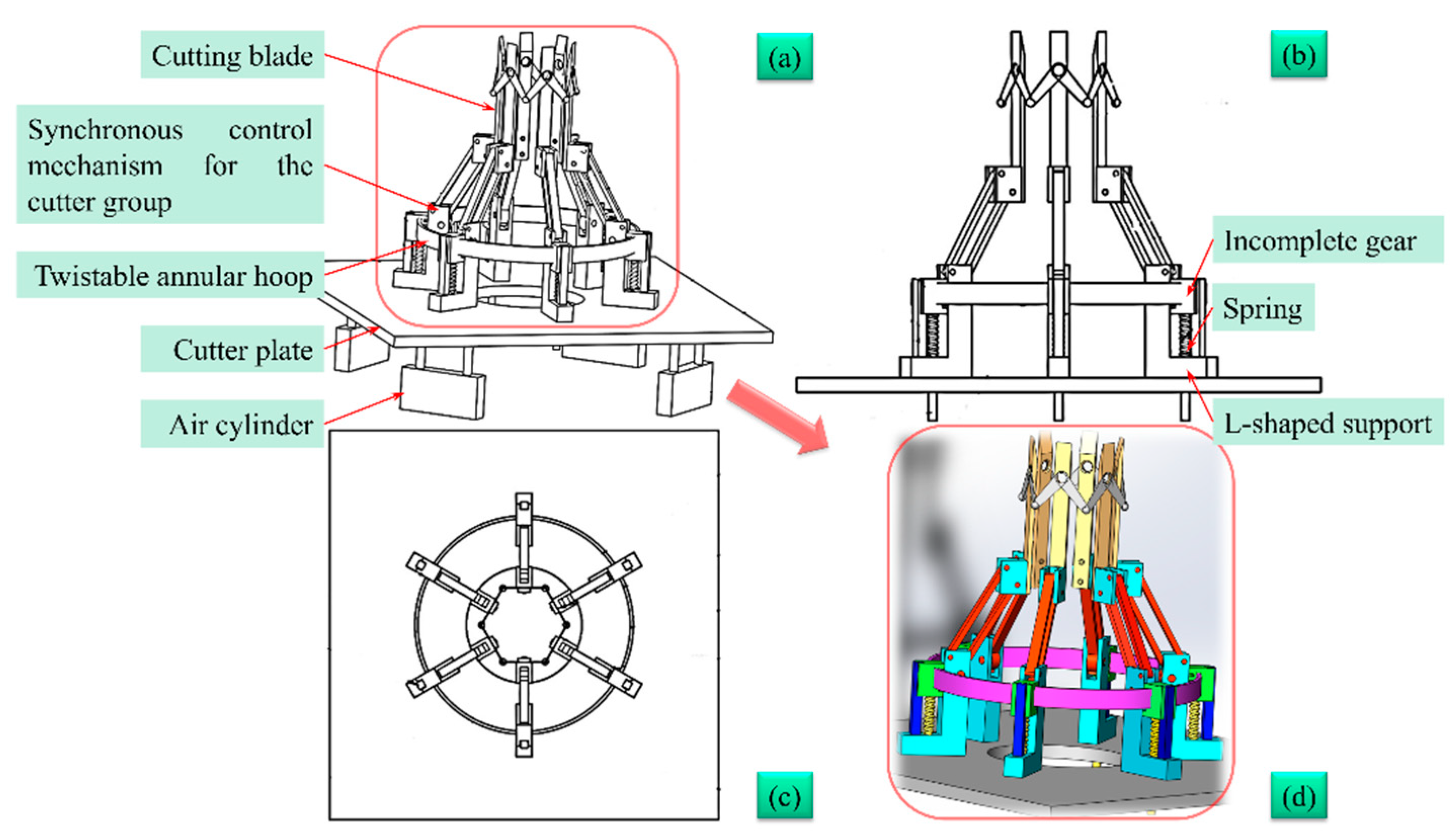
Yang et al. designed another plunge-cutting de-handing mechanism with variable diameter, as shown in
Figure 7 [8]. This mechanism primarily included cutting blades, cutter plate, synchronous control mechanism for the multiple cutters, air cylinder and twistable annular hoop. The cutter group synchronization control mechanism is arrayed on the cutter plate with the center of the cutter plate as the center, and is mainly composed of L-shaped supports, U-shaped blocks, connecting rods, incomplete gears, sliders, vertical guides and springs. During the de-handing process, the annular blade that wraps the bunch stalk moves radially under the drive of the synchronous control mechanism of the cutter group. Once a hand is de-handed, the bunch stalk at the center of the mechanism is moved down manually or mechanically, and the expansion area of the annular envelope is adjusted by the joint action of the torsional deformation of the twistable annular hoop and the deformation mechanism, so as to achieve the purpose of self-adapting to the varying diameters of bunch stalks.
Figure 7. Plunge-cutting de-handing mechanism with variable diameter. (a) Side view, (b) Front view, (c) Top view, (d) Side view of key components.
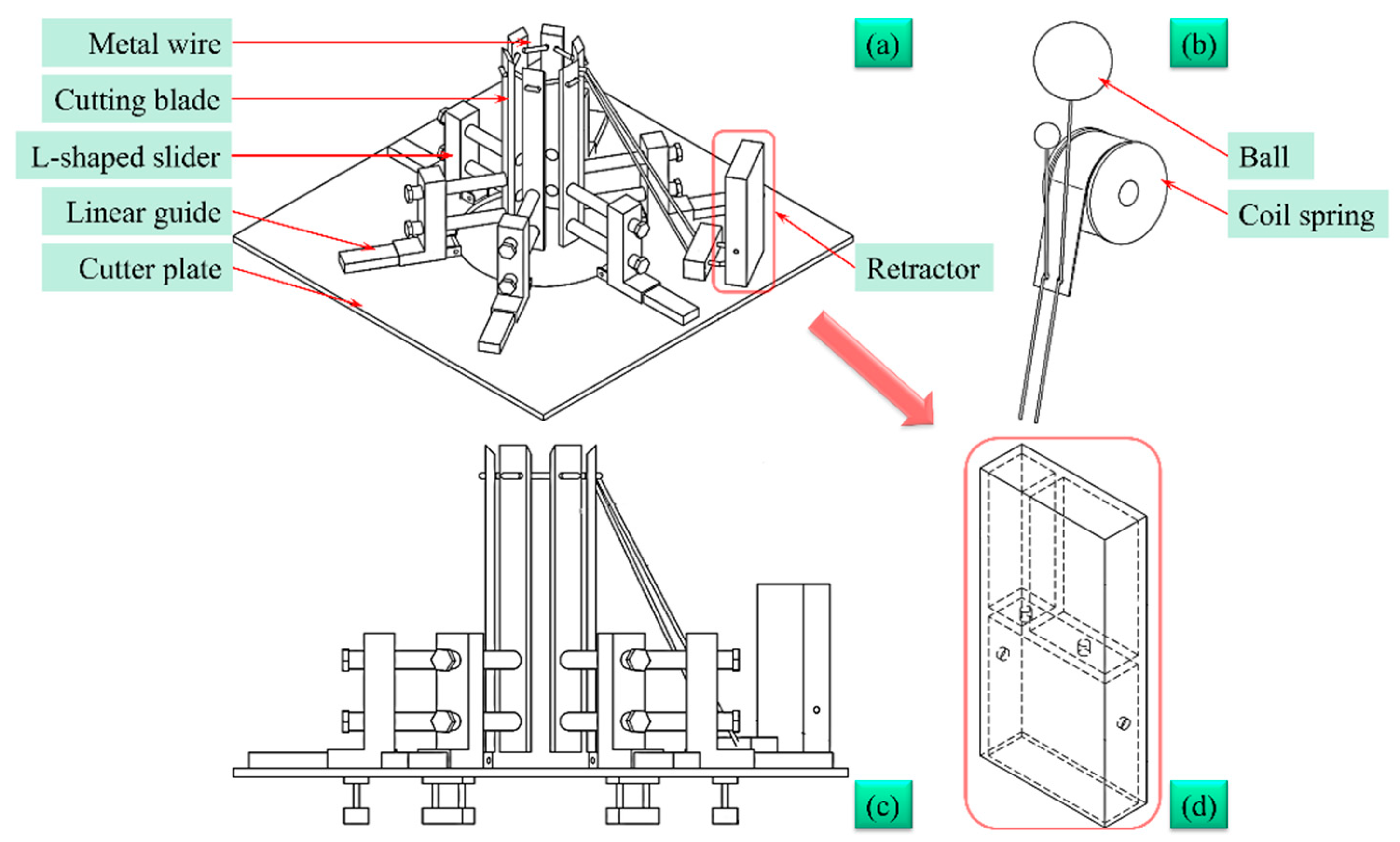
Yang et al. proposed a wire-cutting mechanism for de-handing that consisted of, primarily, a cutter plate, linear guide, L-shaped slider, constant force coil spring, cutting blade and retractor with metal wire (
Figure 8)
[9]. The retractor can be installed between any two linear guides and fixed on the cutter plate, and it can quickly and automatically retract or extend the wire. The cutting blades are connected in series by a metal wire. The cutting blades and the metal wire form an annular envelope, and the metal wire between adjacent blades is used for cutting. For a gradually increasing stalk diameter, the L-shaped slider moves radially, and the length of the metal wire between the cutting blades is elongated to adapt to the change of the diameter of bunch stalk. The cylinders installed under the cutter plate provide power to move the cutter plate upward as a whole. The metal wire in the retractor is tensioned at the moment when the blades cut the node, and finally the blade and the metal wire complete the de-handing operation together. When the whole bunch is completely de-handed, the bunch stalk is removed, the L-shaped slider is reset under the action of the coil spring and the excess metal wire is automatically recovered into the retractor. Using the method of combining the cutting blade and the metal wire, the gap formed by the blade during the radial movement can be made up to ensure that there is always a metal wire between the adjacent blades, so that the banana node will not be missing. Retractors with balls and coil spring allow for rapid wire tensioning and retraction, reducing blade recovery time and improving work efficiency. Therefore, this mechanism minimizes or avoids issues such as short radial expansion stroke of the whole blade, large cutting gap between adjacent blades and long recovery time of blades.
Figure 8. De-handing cutter based on wire-cutting. (a) Axonometric view, (b) Assembly schematic of the wire, coil spring and ball, (c) Front view, (d) Structure diagram of the casing of the retractor.
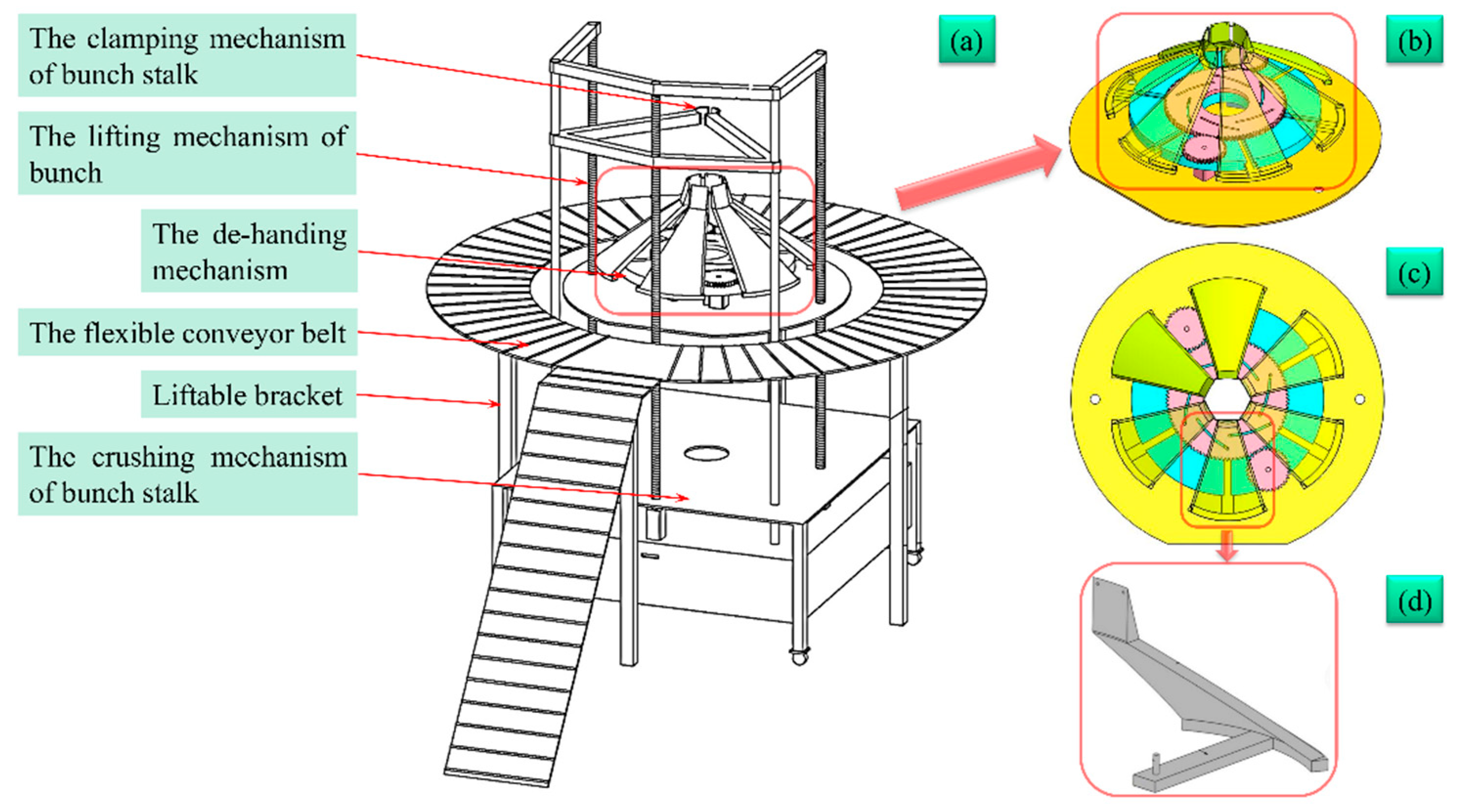
In order to better connect the de-handing operation with the cableway transportation operation and the cleaning operation of banana hands, Yang et al. designed an iris-gear-like mechanism for de-handing based on the working principle of the iris mechanism
[10]. This de-handing machine was primarily composed of a clamping mechanism for the bunch stalk, a lifting mechanism, a de-handing mechanism, a flexible conveyor belt with liftable brackets and a crushing mechanism, as shown in
Figure 9. This mechanism can realize the radial opening and closing of the arc blades, thereby improving the self-adaptability to the varying diameters of the bunch stalks. In addition, the de-handing machine also has the functions of collecting banana hands and crushing bunch stalk. The de-handed banana hands can be safely transported away by the flexible conveyor belt, which reduces the mechanical damage to the fruit. The remaining bunch stalk is crushed in-situ, which is convenient for the subsequent stalk returning operation. This design can effectively integrate the overall operations in a banana postharvest environment.
Figure 9. De-handing machine based on iris-gear-like mechanism. (a) Schematic diagram of the structure of de-handing machine, (b) Axonometric view of de-handing mechanism, (c) Top view of de-handing mechanism, (d) 3D model of arc blade.
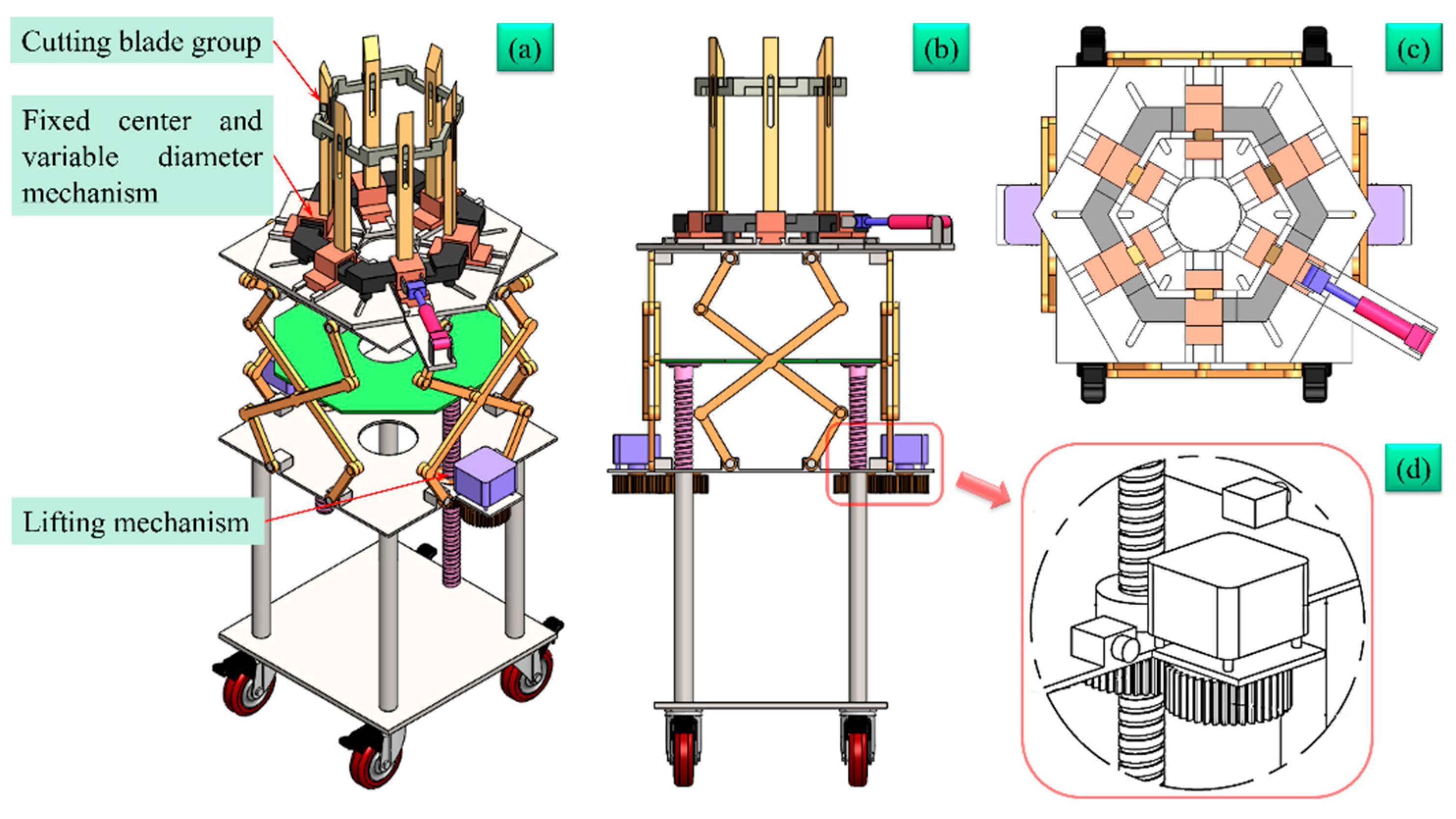
Yang et al. also designed a de-handing mechanism in which the cutting blades can move synchronously in the radial direction and vertically in the axial direction
[11]. Its core components included lifting mechanism, fixed center and variable diameter mechanism and cutting blade group. Before starting the de-handing operation, the banana farmer fixes the end of the bunch vertically in the working space of the cutting blade group, and ensures that the center of the bunch stalk and the center line of the cutter plate coincide. The motor drives the entire de-handing plate to raise it slowly and then the node is severed by the cutting blade group. The schematic diagram of this de-handing mechanism is shown in
Figure 10. This mechanism was able to de-hand one hand at a time or de-hand the whole bunch continuously without external labor or devices to lift the bunch. In addition, the self-centering and adapting mechanism for variable-diameter stalks can realize the synchronous radial expansion or contraction of the cutting blade group. The staggered connection form is adopted between adjacent cutting blades, so that the blades can always be effectively connected during the radial movement. This design ensures that there is no missed cutting phenomenon in the de-handing process in the circumferential direction, thus improving the de-handing efficiency and cutting quality.
Figure 10. The de-handing mechanism with the functions of radial synchronous movement of blades and vertical lifting of the axial direction. (a) Schematic diagram of the structure of de-handing mechanism, (b) Front view of de-handing mechanism, (c) Top view of de-handing mechanism, (d) Partial enlarged view of the structure of the lifting mechanism.
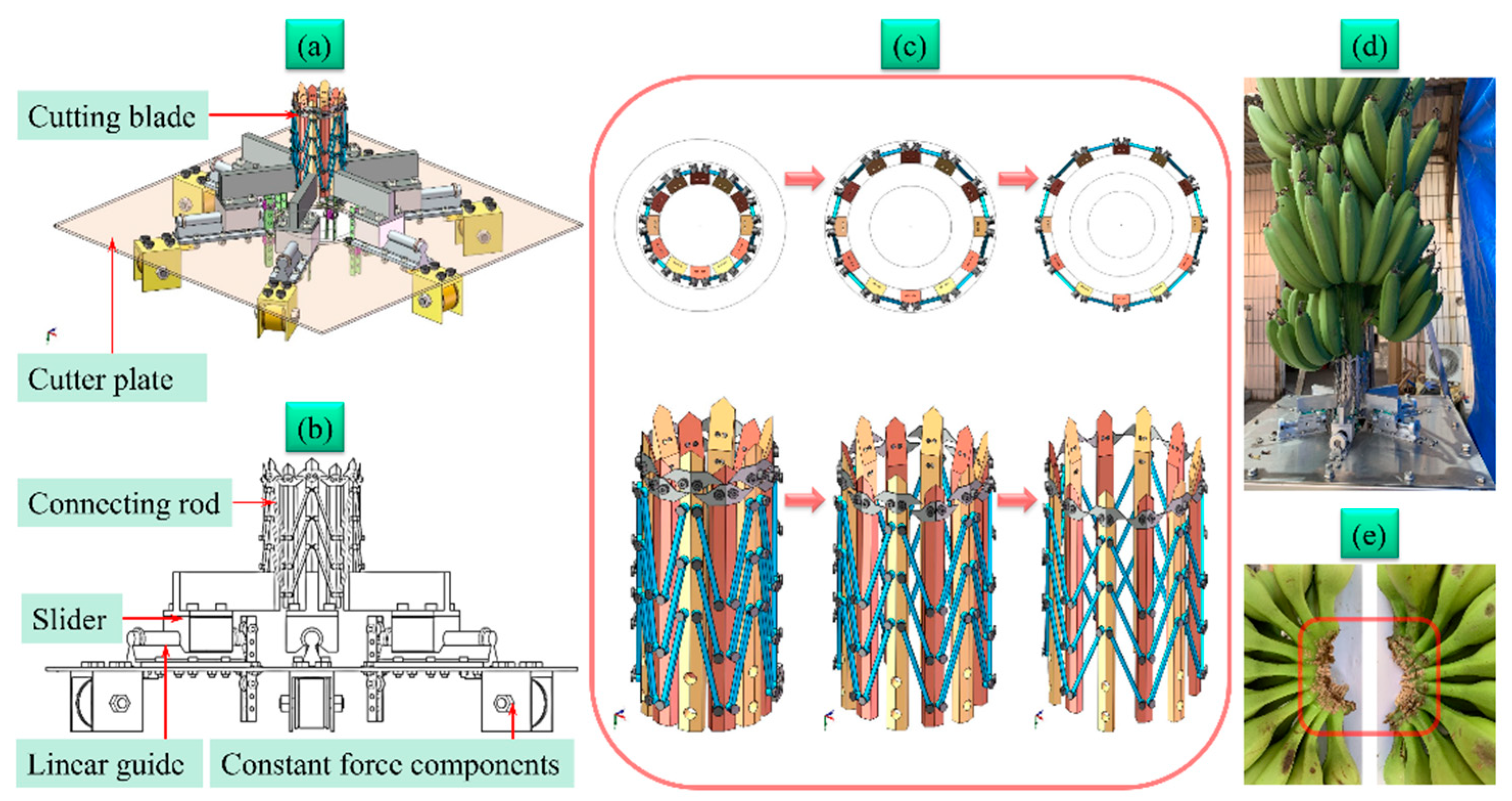
Guo et al. designed a de-handing mechanism based on the working principle of the expandable mechanism widely used in the aerospace industry, which is composed of a cutter plate, linear guides, sliders, cutting blades, connecting rods and constant force components
[12]. The schematic diagram of this mechanism is shown in
Figure 11. Two cutting blades and two connecting rods form a parallel four-bar linkage mechanism, a plurality of parallel four-bar linkage mechanisms form a symmetrically shaped expandable mechanism and the radial extension or retraction of the expandable mechanism is achieved by sliders. When the diameter of the bunch stalk varies, the slider moves radially on the linear guide, and the diameter of the envelope circle formed by the annular cutting blade group changes synchronously with the diameter. Each slider corresponds to a constant force component, which is used to ensure that the clamping force of the annular cutting blade group on the bunch stalk remains constant during the radial movement. The automatic retraction function of the constant force coil spring can also help the cutting blade group to retract and reset after completing de-handing. This de-handing mechanism accommodated a stalk diameter range of 40 to 84 mm and was suitable for continuously de-handing entire bunches.
Figure 11. De-handing mechanism based on expandable mechanism. (a) Axonometric view of de-handing mechanism, (b) Front view of de-handing mechanism, (c) Radial expanding process of cutting blade group, (d) Schematic diagram of de-handing experiment, (e) Incision of banana hands after de-handing.
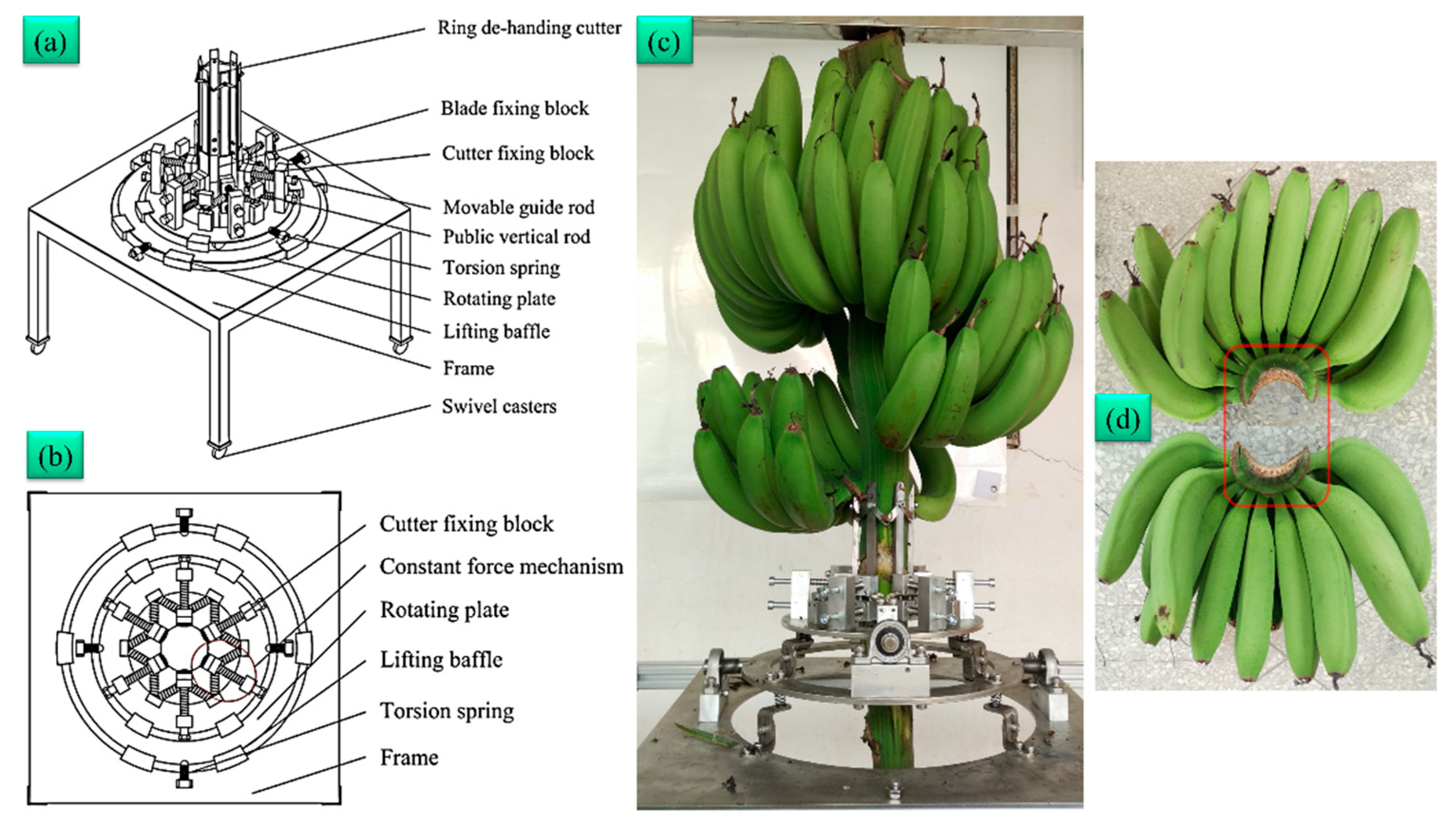
According to the working principle of the three-spring parallel mechanism, Yang et al. and Guo et al. designed a de-handing mechanism, which consisted of cutter plate, torsion springs, horizontal compression springs, uprights, inclined compression springs and cutting blades, as shown in
Figure 12 [3][13]. The cutter plate, cutting blade and frame formed a two-degree-of-freedom series compliance mechanism. The two cutter plates that were rotated around their fixed axes released the rotational freedom in two directions, which ensured self-adapting to the varying curvature of bunch stalk. The torsion spring could be adjusted to reduce the impact of the cutter plate and make the rotation of the cutter plate more stable. Under the action of the constant force mechanism, the ring-shaped cutting blade group can achieve a constant clamping force on bunch stalks, thereby making the continuous de-handing process smoother. The experimental results showed that the constant force mechanism and the rotating cutter plates with Hooke hinge in the self-adaptive system are modeled correctly and the mechanism can ensure de-handing quality while self-adapting to variations in bunch stalk. The success rate of de-handing is 100.0% and the pass rate of node incision is 81.3%.
Figure 12. De-handing mechanism based on constant force mechanism. (a) Axonometric view of de-handing mechanism, (b) Top view of de-handing mechanism, (c) Schematic diagram of de-handing experiment, (d) Incision of banana hands after de-handing.
2.3. Evaluation of Mechanical De-Handing Technologies
Since there’s no common evaluation system/criteria available currently for the banana de-handing operation, after reviewing the ten banana de-handing technologies and equipment, we evaluated each system/mechanism using three performance measures
[3]: success rate of de-handing, incision quality and self-adaptive profiling effect. The design of the circumferentially rotating de-handing cutter shown in
Figure 2 draws on the working principle of the axisymmetric vector nozzle, and the ring-shaped cutting blades can be radially expanded or unfolded synchronously to cope with changes in the diameter of the bunch stalk, which is expected to be applied to the continuous de-handing of whole bunches. At present, this de-handing cutter has been authorized by the China National Intellectual Property Administration; however, there is no report on its processing, manufacturing and actual operation. The circumferentially expandable de-handing platform shown in
Figure 4 uses a thin blade made by stainless steel as a cutting component, which can be opened or closed in the circumferential direction under the drive of the expandable mechanism. This de-handing platform has better profiling and cutting effects for individual banana hands, and the success rate of de-handing is 100%. However, no studies have been reported with this technique on the continuous de-handing of all banana hands in the whole bunch. The de-handing platform shown in
Figure 5 includes an expandable cutting blade to deal with the circumferential growth characteristics of the banana hand and a support base to accommodate the change in the curvature of the bunch stalk. The design of the cutting blade draws on the working principle of the expandable mechanism, and three motors arranged at 90° in space are introduced into the support base to drive the Hook-like hinge. The de-handing platform based on this design may be used as an end-effector of a robot manipulator to complete the de-handing task.
This entry is adapted from the peer-reviewed paper 10.3390/agriculture12111821