Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
Subjects:
Engineering, Mechanical
Flexible strain sensors with high sensitivity, wide sensing range, and excellent long-term stability are highly anticipated due to their promising potential in user-friendly electronic skins, interactive wearable systems, and robotics.
- fluidic-type sensors
- conductive liquids
- wearable
- flexible
- robotics
1. Introduction
Flexible electronics is embarking on its journey by rapidly evolving in the field of electronics. The innovative methods of fabrication enable this field to be environmentally friendly, cost-effective, faster, and robust [1,2,3,4]. They can be reformed to tolerate mechanical deformations. They can bend [5], stretch [6], compress [7], twist [8], and warp [9] because the flex circuit or flex electronics are mounted on a flexible soft substrate [10]. Flexible electronics are becoming more popular since they are adaptable. They are inexpensive, customizable, and portable [11,12,13,14,15]. They have a whole new world of applications to set a benchmark, from collecting energy from temperature differences caused by our bodies and the environment, to folding phones, to wearable bioelectronics devices with sensors to evaluate and diagnose health issues [16,17,18,19,20,21,22]. They have huge potential for adoption in medicine, bioelectronics, or wearable devices [23].
Flexible devices draw great attention because of their efficiency, light weight, flexibility, and stretchability [24,25,26,27,28]. These devices are skin-friendly and made of soft materials attached to human skin, ensuring users’ comfort as much as possible while wearing them [29,30,31,32,33,34,35]. They are used in bioelectronics to calculate wrist pulses [36], glucose [25], body motion [37,38,39,40,41], temperature [40,42], and other physiological signals [43]. Among these devices, sensors [44,45,46] are popular because they have a wide variety of applications in bioelectronics as well as healthcare. They play an important role in these wearable devices because of their having of the capability of guaranteeing the accuracy of signal capture. Highly elastic sensors have been encouraged by wearable sensors for human activity detection, whereas strain sensors are super elastic and highly stretchable for wearable devices [47]. Among these strain sensors, fluidic sensors have been recently used in wearable devices [33,39,48,49,50,51,52] and a few robotic applications [44,45].
Recently, fluidic strain sensors have been in high demand because of their ability to monitor and sense physiological signals and are vital because they are cost-effective, highly compliant, weigh little, and can sense complex environments [26,49,53,54,55]. Because of their high sensitivity, mechanical flexibility, and stretchability, these strain sensors normally function by utilizing the resistive effect of conductive liquid [39,40,45,52,56]. Fluidic strain sensors combine conductive liquids within a flexible substrate’s narrow channel and fabricate specific patterns to improve stretchability [40,41,57]. Microfluidic strategies have been introduced lately because they are easy to fabricate with plastic and soft elastomers, and they are lightweight and consume less energy, which makes them suitable for large stretchable electronics [58]. Microfluidics is the main element in fluidic soft sensors. The conductive microfluidic fillers used by strain sensors can be ionic, metallic, or other chemically synthesized liquid solutions. Their detecting technique is based on the fact that when a particular amount of strain is given to the fluid, the fluid deviates from its original shape, allowing the sensor to perceive [59,60]. Flexible devices in challenging settings can use fluidic strain sensors in a broad range of ways. These sensors can be used in wearable electronics, surgical equipment, robot feedback sensing, and health monitoring systems [61,62,63].
2. Applications of Fluidic Type Strain Sensors
Fluidic strain sensors have been used in a wide range of applications, not only limited to wearable applications such as health monitoring, sports, and gaming, but also in robotics.
2.1. Wearable Devices
Fluidic strain sensors are widely applicable in motion detection applications by wearing them on different parts of the body, such as the knee, elbow, or finger. Sensors are attached to the skin, and adhesive tape is used to make them easily accessible. strain sensor designed to monitor movements [73] are shown in Figure 1a whereas In [40], the strain sensor was designed to detect the motion of the finger. Here, the sensor was attached to the index finger, detecting whether the fist is closed or the finger is extended as shown in Figure 1b. Similarly, finger movement, rotation of the wrist, and water drinking were detected in [31]. The sensor was attached to the skin to distinguish the static as well as dynamic motion of the body. Similarly, Choi et al. [39] showed a sensor applicable for health monitoring, smart clothing, and virtual reality systems by detecting the responses of the electrical resistance caused by deformations. Furthermore, low-cost and highly stretchable sensors were designed in [19,49,91] for medical, flexible, and wearable applications. Similarly, wearable sensor to detect elbow flexation [104] has been designed and shown in Figure 1c. Gao et al. in [100] present a sensor with outstanding mechanical deformability that can be attached to joints, fingers, wrists, etc., For the detection of skin movements. sensor worn to detect bicep muscle tuning were reported in [109] as shown in Figure 1d. For chronic monitoring applications, interfacing low-power wearable electronics with low sensor resistance but good strain sensors was presented in [76]. Moreover, wearable sensor to detect the motion of the knee was introduced in [91] and can be shown in Figure 1e. Another sensor has been designed in [110] for the firefighter’s glove for the motion detection which can be seen in Figure 1f.
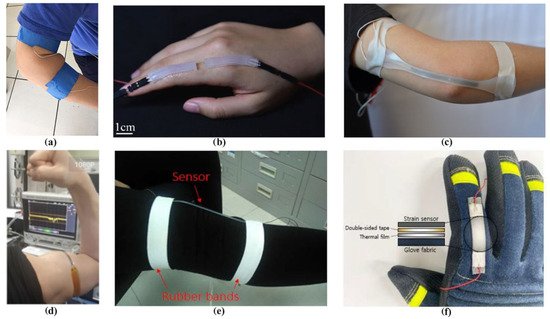
Figure 1. Applications of wearable strain sensors: (a) strain sensor designed to monitor movements [73]; (b) wearable strain sensor to detect finger movement [40]; (c) wearable sensor to detect elbow flexation [103]; (d) sensor worn to detect bicep muscle tuning [109]; (e) wearable sensor to detect the motion of the knee [91]; (f) attaching a sensor to a firefighter’s glove to detect motion [110].
A robust strain sensor using a simple fabrication methodology was designed in [44] for high-end feedback applications such as monitoring the fingers, arm, joints (elbow and knee), and neck of the human.
2.2. High-End Feedback for Soft Robotics Systems
Fluidic strain sensor applications are not limited to health monitoring and other medical applications only but have broad applications in the field of robotics too. Soft sensors are necessary for wearable robots or other functional robots to allow for soft human–robot contact and feedback control of the robotic actions. These robots might be therapeutic wearable robots, transporting robots, or soft robotic grippers. These fluidic sensors are applied in conventional as well as soft robotics. Wu et al. in [72] tried to remotely control the position of the robotic hand by providing gestures with a glove-mounted sensor, as shown in Figure 2a where different motions of the fingers were analyzed by making a hard fist as shown in Figure 2a(I) and analyzing the motion by closing and opening number of fingers as shown in Figure 2a(II–V). Furthermore, for soft robotics, the stretchable strain sensor was designed in [77,94], showing the potential to implement the strain sensors in soft robotics as shown in Figure 2b where the study in [77] presented a robot which is designed with the help of strain sensors to analyze the motion of the robot joint.
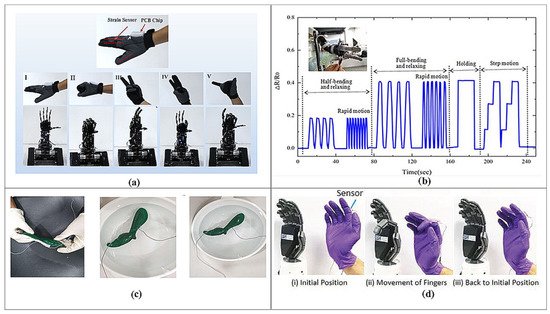
Figure 2. Flexible strain sensor application in robotics: (a) controlling a robotic hand from the remote position [72]; (I) original state (II) hard fist (III) bending 3 fingers (IV) bending 2 fingers and (V) and bending 4 fingers (b) the sensor is attached to the robot joint to analyze the movement [77]; (c) the sensor attached to the legs under water [45]; (d) to move the robotic finger as feedback, the sensor is attached in the human finger [37].
Similarly, Soomro et al. in [45] presented a sensor that is applicable in motion detection as well as robotics applications. The designed sensor was attached to the adhesive bandages for detection purposes, whereas the sensor was used to mimic a robotic leg, which was designed by using a commercial 3D printer that was tested and analyzed underwater, as is shown in Figure 2c. To determine the displacement of the robot’s grippers and pneumatic as well as hydraulic actuators, a fluidic strain sensor was designed by Keulemans et al. in [50]. However, the study in [37] have designed a robotic hand where the sensor is attached to the human finger to get the feedback from the robotic finger as shown in Figure 2d. Similarly, The studies in [73,103,106] showed that the relative change responses in the deformation of strain sensors represent a high potential for small-scale robotics systems. In one study, a fluidic strain sensor [102] with high elasticity and deformation (to some extent) offers applications in smart textiles, healthcare/fitness, and remote sensing of a robot’s motion, or expansion and contraction of building and bridges. There are other varieties of applications that involve flexible strain sensors based on conductive liquids such as in artificial skin [45,113,114], where the conductive liquid-based strain sensors are embedded or attached to the skin, where strain sensors work with a textile called e-textile [92,115] for a wide range of purposes, as well as in physical training [97,116] to detect the bending and motion.
This entry is adapted from the peer-reviewed paper 10.3390/electronics11182903
This entry is offline, you can click here to edit this entry!