Car-following behavior is the result of the interaction of various elements in the specific driver-vehicle-environment aggregation. Under the intelligent and connected condition, the information perception ability of vehicles has been significantly enhanced, and abundant information about the driver-vehicle-environment factors can be obtained and utilized to study car-following behavior. Therefore, it is necessary to comprehensively take into account the driver-vehicle-environment factors when modeling car-following behavior under intelligent and connected conditions.
- traffic flow theory
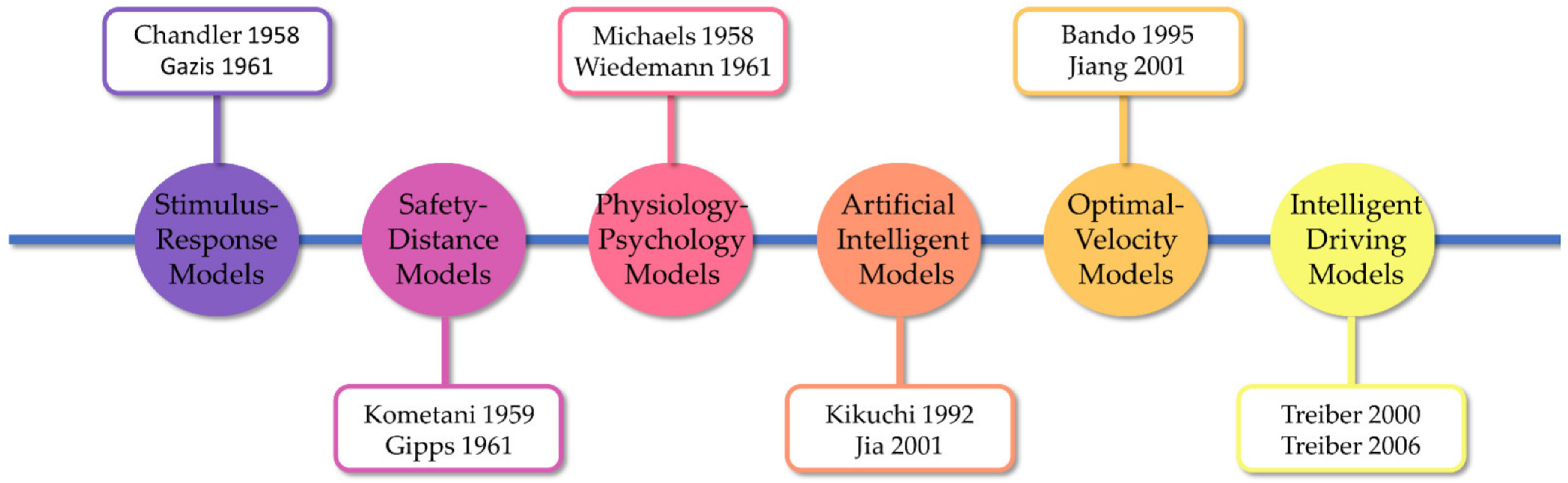
- car-following model
- traffic information
1. Introduction
2. Factors in Modeling the Car-Following Behavior
2.1. Driver
2.1.1. External Heterogeneity
2.1.2. Internal Heterogeneity
2.2. Vehicle
2.2.1. Types
2.2.2. Sorts
2.3. Environment
2.3.1. Road
Road condition
Different from the traffic conditions that indicate traffic congestion on the road, road conditions are the technical conditions of the main body, surface, structure, and accessories of the road. In traffic flow theory, a good road condition is regarded as the normal road condition. According to driving experiences, when the road condition deviates from the normal condition, the car-following behavior will be affected and show different characteristics. Therefore, in the research on car-following behavior, the road condition refers to the damage to road surface or other components.
- (1)
-
Micro level. The vehicle’s acceleration/deceleration/velocity/headway/energy consumption/exhaust emissions in the starting, driving, and braking process are all affected by the road conditions. Specifically, the lasting time will enlarge, and the velocity along with acceleration/deceleration will decline in the starting and braking process. There will be a disturbance in the velocity and headway in the driving process, which will cause an increase of energy consumption and exhaust emissions.
- (2)
-
Macro level. The stability of traffic flow will be enhanced, and the shock wave will be alleviated when the road condition is good. It is noteworthy that there are negative impacts of good road condition on stability when the traffic flow is evaluated for the stop-and-go state.
2.3.2. Weather
In addition to the road conditions, there are significant impacts of weather on car-following behavior. Good weather is generally regarded as normal weather in the research on car-following behavior. When the weather gets worse, it will increasingly affect the car-following behavior. The impacts of bad weather on driving behavior are significant and widely acknowledged. Because of this, traffic managers around the world will send alerts to drivers when they detect bad weather. The previous norm organized weather according to type, such as rain, snow, and fog. In fact, no matter what type of weather, its impacts on driving behavior can be divided into two aspects: visibility and adhesion. Compared with good weather, the presence of liquid and solid particles in the air in the rain, snow, fog, and other weather will lead to the decline of visibility, which will affect the driver’s perception of traffic conditions and then affect his/her car-following and other driving behaviors.
3. Conclusions
There are differences in the car-following behavior when the vehicle is in various driver-vehicle-environment aggregations, which suggests that it is difficult to use one model to comprehensively and precisely describe the car-following behavior of a vehicle with enhanced information perception ability. Generally speaking, (i) the reality that the car-following behavior is comprehensively affected by various driver-vehicle-environment factors has not been adequately considered, and (ii) the processing approaches of impacts of driver, vehicle, or environment on car-following behaviors were relatively simple in previous studies. Therefore, the comprehensive consideration of driver, vehicle, and environmental factors from a global perspective, fully incorporating the characteristics of various factors’ influence, the evolution of modeling and evaluation methods, and the construction of the new generation datasets are the more urgent needs for future works.
This entry is adapted from the peer-reviewed paper 10.3390/su14138179
References
- Brackstone, M.; McDonald, M. Car-Following: A Historical Review. Transp. Res. Part F Traffic Psychol. Behav. 1999, 2, 181–196.
- Wang, D.-H.; Jin, S. Review and Outlook of Modeling of Car Following Behavior. China J. Highw. Transp. 2012, 25, 115–127. (In Chinese)
- Yang, L.; Zhang, C.; Qiu, X.; Li, S.; Wang, H. Research progress on car-following models. J. Traffic Transp. Eng. 2019, 19, 125–138. (In Chinese)
- He, Z.; Xu, R.; Xie, D.; Zong, F.; Zhong, R. A Review of Data-driven Car-following Models. J. Transp. Syst. Eng. Inf. Technol. 2021, 21, 102–113. (In Chinese)
- Han, J.; Shi, H.; Chen, L.; Li, H.; Wang, X. The Car-Following Model and Its Applications in the V2X Environment: A Historical Review. Future Internet 2022, 14, 14.
- Kerner, B.S.; Klenov, S.L. Spatial-Temporal Patterns in Heterogeneous Traffic Flow with a Variety of Driver Behavioural Characteristics and Vehicle Parameters. J. Phys. -Math. Gen. 2004, 37, 8753–8788.
- Brackstone, M. Driver Psychological Types and Car Following: Is There a Correlation? Results of a Pilot Study. In Proceedings of the 2nd International Driving Symposium on Human Factors in Driver Assessment, Training and Vehicle Design: Driving Assessment, Park City, UT, USA, 21–24 July 2003; University of Iowa: Park City, UT, USA, 2005; pp. 245–250.
- Ossen, S.; Hoogendoorn, S.P. Heterogeneity in Car-Following Behavior: Theory and Empirics. Transp. Res. Part C-Emerg. Technol. 2011, 19, 182–195.
- Doroudgar, S.; Chuang, H.M.; Perry, P.J.; Thomas, K.; Bohnert, K.; Canedo, J. Driving Performance Comparing Older versus Younger Drivers. Traffic Inj. Prev. 2017, 18, 41–46.
- Qi, G.; Guan, W. Quantitatively Mining and Distinguishing Situational Discomfort Grading Patterns of Drivers from Car-Following Data. Accid. Anal. Prev. 2019, 123, 282–290.
- Zhang, D.; Li, K.; Wang, J. A Curving ACC System with Coordination Control of Longitudinal Car-Following and Lateral Stability. Veh. Syst. Dyn. 2012, 50, 1085–1102.
- An, S.; Xu, L.; Chen, G.; Shi, Z. A New Car-Following Model on Complex Road Considering Driver’s Characteristics. Mod. Phys. Lett. B 2020, 34, 2050182.
- Cheng, Q.; Jiang, X.; Wang, W.; Dietrich, A.; Bengler, K.; Qin, Y. Analyses on the Heterogeneity of Car-Following Behaviour: Evidence from a Cross-Cultural Driving Simulator Study. Iet Intell. Transp. Syst. 2020, 14, 834–841.
- Hamdar, S.H.; Treiber, M.; Mahmassani, H.S.; Kesting, A. Modeling Driver Behavior as Sequential Risk-Taking Task. Transp. Res. Rec. 2008, 2088, 208–217.
- Zhu, H.B.; Dai, S.Q. Analysis of Car-Following Model Considering Driver’s Physical Delay in Sensing Headway. Phys.-Stat. Mech. Its Appl. 2008, 387, 3290–3298.
- Yu, L.; Li, T.; Shi, Z.-K. Density Waves in a Traffic Flow Model with Reaction-Time Delay. Phys.-Stat. Mech. Its Appl. 2010, 389, 2607–2616.
- Wang, H.; Wang, W.; Chen, J.; Jing, M. Using Trajectory Data to Analyze Intradriver Heterogeneity in Car-Following. Transp. Res. Rec. 2010, 2188, 85–95.
- Laval, J.A.; Toth, C.S.; Zhou, Y. A Parsimonious Model for the Formation of Oscillations in Car-Following Models. Transp. Res. Part B-Methodol. 2014, 70, 228–238.
- Saifuzzaman, M.; Zheng, Z.; Haque, M.M.; Washington, S. Revisiting the Task-Capability Interface Model for Incorporating Human Factors into Car-Following Models. Transp. Res. Part B-Methodol. 2015, 82, 1–19.
- Pekkanen, J.; Lappi, O.; Itkonen, T.H.; Summala, H. Task-Difficulty Homeostasis in Car Following Models: Experimental Validation Using Self-Paced Visual Occlusion. PloS ONE 2017, 12, e0169704.
- Huang, Y.-X.; Jiang, R.; Zhang, H.; Hu, M.-B.; Tian, J.-F.; Jia, B.; Gao, Z.-Y. Experimental Study and Modeling of Car-Following Behavior under High Speed Situation. Transp. Res. Part C Emerg. Technol. 2018, 97, 194–215.
- Lindorfer, M.; Mecklenbraeuker, C.F.; Ostermayer, G. Modeling the Imperfect Driver: Incorporating Human Factors in a Microscopic Traffic Model. Ieee Trans. Intell. Transp. Syst. 2018, 19, 2856–2870.
- Peeta, S.; Zhang, P.C.; Zhou, W.M. Behavior-Based Analysis of Freeway Car-Truck Interactions and Related Mitigation Strategies. Transp. Res. Part B-Methodol. 2005, 39, 417–451.
- Li, S.; Wang, J.; Li, K.; Lian, X.; Ukawa, H.; Bai, D. Modeling and Verification of Heavy-Duty Truck Drivers’ Car-Following Characteristics. Int. J. Automot. Technol. 2010, 11, 81–87.
- Zhu, W.-X.; Zhang, H.M. Analysis of Mixed Traffic Flow with Human-Driving and Autonomous Cars Based on Car-Following Model. Phys.-Stat. Mech. Appl. 2018, 496, 274–285.
- Li, Y.; Zhang, L.; Peeta, S.; He, X.; Zheng, T.; Li, Y. A Car-Following Model Considering the Effect of Electronic Throttle Opening Angle under Connected Environment. Nonlinear Dyn. 2016, 85, 2115–2125.
- Qin, Y.; Wang, H.; Ran, B. Stability Analysis of Connected and Automated Vehicles to Reduce Fuel Consumption and Emissions. J. Transp. Eng. Part-Syst. 2018, 144, 04018068.
- Qin, Y.; Wang, H.; Ran, B. Impact of Connected and Automated Vehicles on Passenger Comfort of Traffic Flow with Vehicle-to-Vehicle Communications. Ksce J. Civ. Eng. 2019, 23, 821–832.
- Seraj, M.; Li, J.; Qiu, Z. Modeling Microscopic Car-Following Strategy of Mixed Traffic to Identify Optimal Platoon Configurations for Multiobjective Decision-Making. J. Adv. Transp. 2018, 2018, 7835010.
- Xing-Li, L.; Tao, S.; Hua, K.; Shi-Qiang, D. Phase Transition on Speed Limit Traffic with Slope. Chin. Phys. B 2008, 17, 3014–3020.
- Li, C.; Shimamoto, S. An Open Traffic Light Control Model for Reducing Vehicles’ CO2 Emissions Based on ETC Vehicles. IEEE Trans. Veh. Technol. 2012, 61, 97–110.
- Komada, K.; Masukura, S.; Nagatani, T. Effect of Gravitational Force upon Traffic Flow with Gradients. Phys.-Stat. Mech. Its Appl. 2009, 388, 2880–2894.
- Zhu, W.-X.; Yu, R.-L. Nonlinear Analysis of Traffic Flow on a Gradient Highway. Phys. Stat. Mech. Appl. 2012, 391, 954–965.
- Wen-Xing, Z.; Rui-Ling, Y. Solitary Density Waves for Improved Traffic Flow Model with Variable Brake Distances. Commun. Theor. Phys. 2012, 57, 301–307.
- Zhu, W.-X. Analysis of CO2 Emission in Traffic Flow and Numerical Tests. Phys.-Stat. Mech. Appl. 2013, 392, 4787–4792.
- Ehsani, M.; Gao, Y.; Gay, S.; Emadi, A. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles: Fundamentals, Theory, and Design; CRC Press: Boca Raton, FL, USA, 2004; ISBN 978-0-429-12819-6.
- Yang, S.C.; Li, M.; Lin, Y.; Tang, T.Q. Electric Vehicle’s Electricity Consumption on a Road with Different Slope. Phys. Stat. Mech. Its Appl. 2014, 402, 41–48.
- Tan, J.; Gong, L.; Qin, X. An Extended Car-Following Model Considering the Low Visibility in Fog on a Highway with Slopes. Int. J. Mod. Phys. C 2019, 30, 1950090.
- Zhang, P.; Xue, Y.; Zhang, Y.-C.; Wang, X.; Cen, B.-L. A Macroscopic Traffic Flow Model Considering the Velocity Difference between Adjacent Vehicles on Uphill and Downhill Slopes. Mod. Phys. Lett. B 2020, 34, 2050217.
- Zhu, W.-X.; Yu, R.-L. A New Car-Following Model Considering the Related Factors of a Gyroidal Road. Phys.-Stat. Mech. Appl. 2014, 393, 101–111.
- Meng, X.P.; Yan, L.Y. Stability Analysis in a Curved Road Traffic Flow Model Based on Control Theory. Asian J. Control 2017, 19, 1844–1853.
- Konishi, K.; Kokame, H.; Hirata, K. Decentralized Delayed-Feedback Control of an Optimal Velocity Traffic Model. Eur. Phys. J. B 2000, 15, 715–722.
- Xiaomei, Z.; Ziyou, G. The Stability Analysis of the Full Velocity and Acceleration Velocity Model. Phys.-Stat. Mech. Appl. 2007, 375, 679–686.
- Zhai, C.; Wu, W. Car-Following Model Based Delay Feedback Control Method with the Gyroidal Road. Int. J. Mod. Phys. C 2019, 30, 1950073.