Bluetooth Low Energy (BLE) is a positioning technology that is commonly used in indoor positioning systems (IPS) such as shopping malls or underground parking lots, because of its low power consumption and the low cost of Bluetooth devices. It also maintains high positioning accuracy. However, it is necessary to configure a large number of devices in the environment to obtain accurate positioning results. A planar model that conforms to the signal strength in the environment was generated, wherein the database comparison method is replaced by an equation solution, to improve various costs but diminish the positioning accuracy. We propose to further replace the planar model with a cost-effective fitting model to both save costs and improve positioning accuracy
1. Introduction
With the advances in smart phones, mobile devices and wireless networks, applications and developments in Location-Based Services (LBS) have steadily progressed, with increasing accuracy in positioning. Depending on the situation, positioning services can extend to different functions, including weather forecasts, bus information, and even games. It can be observed that people’s lives are inseparable from positioning services. Global Positioning System (GPS) is an increasingly mature positioning service [
1] which uses triangulation for positioning. However, effective satellite signals cannot be obtained where there are obstacles, which makes it impossible to accurately apply GPS in indoor spaces with many obstacles. In addition to obstacles, signal interference and multipath propagation are also challenges faced in indoor environments. Hence, indoor positioning technology (IPS)-related research is constantly innovating, including Wi-Fi, Bluetooth Low Energy (BLE), ZigBee and infrared technology. Among them, BLE is a positioning technology that is more commonly used in shopping malls or underground parking lots because of its relatively low power consumption and the low cost of Bluetooth devices, whilst maintaining relatively high positioning accuracy. Although the cost of BLE itself is relatively low, the positioning method used today requires a large number of devices to be deployed in large spaces such as parking lots or shopping malls to obtain accurate positioning results. The equipment cost is proportional to the size of the environment.
As early as 2000, a Microsoft team reported on an indoor positioning system called Radio Detection and Ranging (RADAR) [
2], which was based on the signal strength comparisons for positioning. Subsequent studies also used this concept to perform indoor positioning through Wi-Fi wireless base stations distributed throughout public places such as transportation stations, schools, and department stores. This positioning method required collection of the signal strength characteristics of the reference points in the environment, establishment of a database of this data, and then location of the signal strength characteristics between the reference points. However, this method required considerable time and manpower, both in the establishment of the database and the comparative analysis of the positioning; moreover, these costs were proportional to the size of the environment.
2. Related Works
Whether it is Wi-Fi, BLE, RFID, or others, distance measurement and positioning are achieved through the path loss characteristics of radio waves; that is, signal strength gradually decreases with increased distance. However, in indoor environments, signals are easily affected by multipath propagation, making IPS research challenging. Nowadays, there are many studies related to positioning measurement methods, which can be divided into three categories, namely time-based methods, angle-based methods, and received signal strength-based methods. These three methods were explained in [
4]. The popular received signal strength-based methods and other positioning systems are explained below.
2.1. Received Signal Strength-Based Methods
Most of the positioning technology developed using received signal strength (RSS) technology is based on the attenuation value of signal strength between the transmitter and the receiver to measure the distance. The prediction model [
2] for calculating distance based on signal transmission is shown in Formula (1).
P(
d) is the signal strength value of the user’s location;
d is the distance from the wireless BS;
P(d0) is the signal strength of the reference point;
d0
is the distance between the reference point and the wireless BS; n is parameter related to the signal strength attenuation due to the distance; nW is the number of walls; C is the maximum allowable number of walls; WAF is the wall attenuation factor; WAF will vary depending on the wall material.
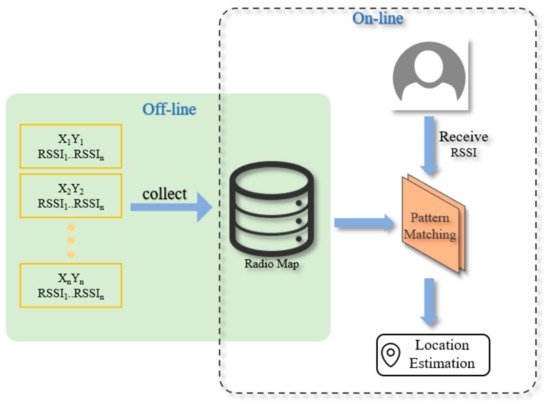
This model was proposed as RADAR by Microsoft in order to reduce the cost of the offline stage in IPS. It requires considerable time and manpower to collect the signal strength characteristics of each reference point, and these costs will be proportional to the size of the environment. Microsoft uses radio signals from indoor Wi-Fi wireless base stations for IPS using RADAR positioning technology, as published by IEEE INFOCOM in 2000. The RADAR system is the RSS positioning method based on signal strength, which can be divided into two stages, namely the offline stage and the online stage [
2].
In the offline stage, the RSSI of each reference point (i.e., access point, AP) is collected multiple times. Because the signal strength received for each reference point is different, the characteristics of the individual signal patterns can be obtained and sorted for the database. In the subsequent online stage, the signal strength received through the current location is compared with the signal pattern database created in the offline stage to derive the user’s position based on a comparison result from the signal pattern matching. Thus, this is called a signal pattern-matching method as shown in Figure 1.
Figure 1. RADAR Positioning Technology Flowchart [
2].
The RSSI received during the online stage is compared with the database created in the offline stage to obtain the user’s position. The Euclidean distance Formula (2) is used for calculation with the RSSI obtained online and all RSSIs in the database, where X is the RSSI of the user’s location; Y is the RSSI of the reference point in the database; n is the number of base stations; and d(x) is the comparison between the user and the database reference point after calculation. As a result, the number of reference points in the database is the number of d(x) solutions, and from all d(x), the reference point closest to the user can be calculated.
The signal pattern-matching method is currently a common and highly accurate method for IPS. However, because the positioning method continuously compares the data in the database, the amount of calculation is complex. When the positioning environment is larger, more signal pattern data are required for comparison; thus, the calculation complexity also increases. Therefore, reducing the computational complexity has become a problem that needs to be considered to effectively improve the signal pattern-matching IPS, and the use of models to replace the comparison method has become an effective means to reduce the computational complexity.
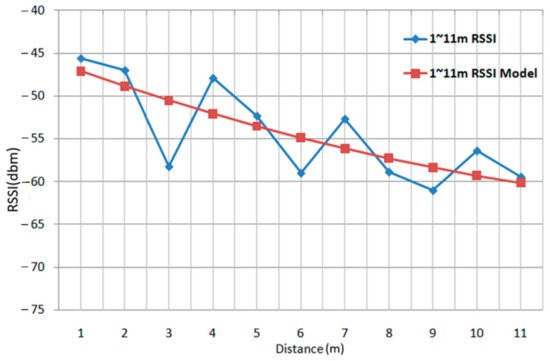
Numerous studies have explored the relationship between signal strength and the distance between wireless base stations and devices [
5,
6,
7], and have found the relationship to be inversely proportional. However, the curve in the relationships fluctuates up and down without the rule of linearity. In order to reduce the computational complexity, an equation is used instead of signal pattern comparison; the linear model obtained from the equation is used to replace the signal strength curve, as shown in
Figure 2.
Figure 2. Graph of Relationship between Signal Intensity and Distance [
6].
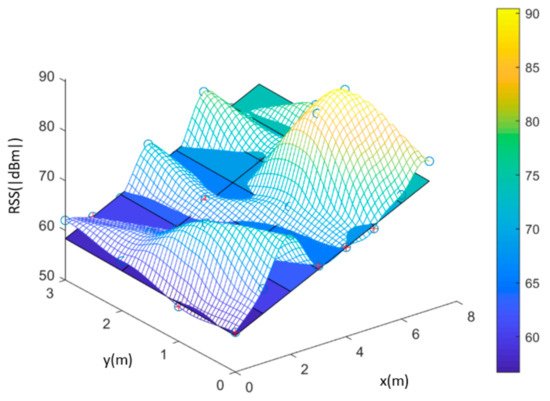
Some studies have suggested that signal strength could first be collected separately in individual spaces, such as the bedroom, the living room or the kitchen. Then, the “signal strength surface” of the space can be obtained for each base station. Through the signal strength surface, the least-squares method [
8] can be used to calculate the plane, and this plane can be used for the positioning model. A planar model can be obtained for each space corresponding to each wireless base. By just detecting which space the user is in, the planar model of the space can be used to locate the user’s position. When the strength at a specific location is known, the location can be determined through solving the simultaneous equations by simply inputting the strength into the two planar models. This replaces the massive data comparison method, achieving the goal of reducing calculation complexity [
3].
Figure 3 is an example of actual signal strength distribution and the planar model.
Figure 3. Actual Signal Intensity Distribution and the Planar Model.
2.2. Other Positioning Systems
The ZigBee positioning system uses the triangulation method for positioning; it does not use signal transmission and reception time difference for distance conversion, rather it uses the signal and distance relationship model to convert the signal strength into distance. Equation (3) presents the ZigBee model based on the relationship between signal strength and distance [
9].
where RSSI is the signal strength at the receiver;
d is the distance between the receiver and the transmitter;
d0
is the distance in measurement units; n is the signal attenuation value; and A is the signal strength per unit distance. Using this model, the relationship between ZigBee signal strength and distance can be obtained, and triangulation can be used for positioning. However, because there are many obstacles in most rooms, shadowing effects, or signal diffraction and reflection easily occur. The resulting multipath effect leads to error between the calculated transmission distance and the actual distance, so the calculated position is relatively inaccurate.
Radio frequency identification (RFID) positioning technology detects a tag through the RFID reader, and knows the range of the RFID reader where the tag is located. However, the range of RFID is quite limited. The ultra-high frequency (UHF) RFID tag can only reach a transmission distance of 5 m. This equipment is mostly used to determine whether an object is present at or passes through a preset position; it is impossible to detect exactly where the object is. RFID is not suitable for indoor positioning due to its small transmission range.
The iBeacon [
10], a BLE device officially launched by Apple, is based on Bluetooth-based positioning technology. Compared with other technologies such as Wi-Fi, due to its small size, low power consumption and low cost, it is more suitable for applications in various commercial environments and indoor venues. Nowadays, most Bluetooth positioning technologies use multiple iBeacons installed inside as base stations to transmit signal strength, that is, RSS. Similar to Wi-Fi, different transmission distances will have different degrees of attenuation. After receiving the signal strength, the receiving port can calculate the distance between the receiving port and each iBeacon, and then apply a triangulation method to obtain the location of a mobile phone in the area. However, the positioning accuracy and stability of BLE is still affected by human body shadowing and multipath interference.
Studies in [
11,
12,
13,
14,
15] are related to Bluetooth indoor positioning technology in recent years. The study in [
11] added the Bluetooth signal strength to the weighting, and used a signal pattern comparison method for positioning. Ref. [
12] used iBeacon combined with polynomial regression model (PRM), fingerprinting (FP) and extended Kalman filter technology for indoor positioning. Using FP and PRM to estimate the position of the target and the distance between the target and iBeacon, respectively, algorithm achieved an accuracy of less than 2.56 m when the beacons were densely deployed (one iBeacon per nine meters). Ref. [
13] combined Wi-Fi and BLE technologies with radio fingerprinting to allow users to create radio maps and update them continuously. Ref. [
14] used signal-to-noise ratio (SNR) and Bluetooth signal strength to perform positioning calculations through a machine learning service provided by Amazon Web Services (AWS). Ref. [
15] proposed a particle filter-based indoor positioning system to localize tags that can broadcast BLE beacon messages. To reduce fluctuations of RSSI data, they design a Kalman filter to smooth those data. Based on the smoothed RSSI data, they propose a particle filter to conduct IPS tasks. Though the above methods are all aimed at improving positioning accuracy, they also increase the burden of computational complexity. Comparisons of characteristics in various positioning technologies are summarized in
Table 1.
Table 1. Comparisons of characteristics in various positioning technologies [
16].
| Wireless Position System |
Localization Technique |
Range |
Accuracy |
| DOLPHIN (RF with Ultrasonic) |
ToA, trilateration |
Indoor |
2 cm |
| RFID/INS |
RSS/INS |
Indoor |
2 m |
| UWB |
TDoA/ToA, trilateration |
15 m |
10 cm |
| RFID/FPM |
RSS/INS |
Indoor |
1.7 m |
| Land Marc |
RSS, triangulation |
50 m |
1~2 m |
| GPS |
ToA, trilateration |
Global |
1~5 m |
| Radar |
RSS, triangulation |
Indoor |
Indoor |
| Cricket |
ToA, trilateration |
10 m |
2 cm |
| Active Bats |
ToA, trilateration |
50 m |
9 cm |
| Active Badge |
ToA, trilateration |
5 m |
7 cm |
| COMPASS |
RSS, triangulation |
15 m |
1.65 m |
| WhereNet (RF) |
RSS, triangulation |
20 m |
2~3 m |
| LiFS |
Fingerprinting database |
Indoor |
9 m |
| Bluetooth |
RSSI fingerprinting/RSSI theoretical propagation model |
Indoor |
2~5 m |
This entry is adapted from the peer-reviewed paper 10.3390/s22166007