The underwater wireless sensor network (UWSN) is a network used to perform monitoring of tasks over a specific region; it is equipped with smart sensors and vehicles that are adapted to communicate cooperatively through wireless connections [1]. The surface sink retrieves the data from sensor nodes. The sink node has a transceiver that can control acoustic signals received from underwater nodes. The transceiver also can transmit and receive long-range radio frequency signals for communication with the onshore station. The collected data are used locally or connected to another network for a particular purpose [2].
- underwater sensor networks
- acoustic communication
- ocean environment
- wireless sensor networks
- UWSN
1. Introduction
Figure 1 illustrates an overview of the UWSN environment. The network architecture incorporates traditional underwater wireless sensor networks designed by [1] and real-time underwater wireless sensor network architecture in the form of Internet of Underwater Things proposed by [3].
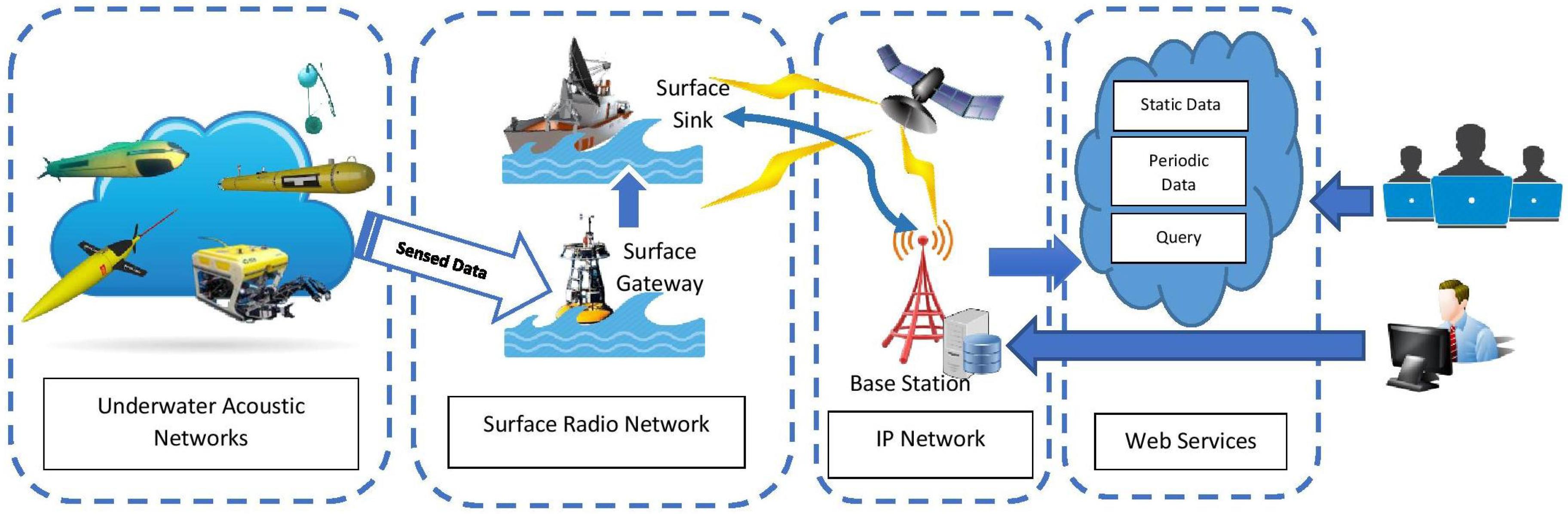
Underwater wireless sensor networks comprise of nodes that are deployable on the surface and under the water. All nodes need to communicate and exchange information with other nodes in the same network and with the base station. Communication systems in the sensor network involve the transmission of data using acoustic, electromagnetic, or optical wave media. Among these types of media, acoustic communication is the most popular and widely used method due to its attenuation features in water. The factor of low transmission is derived from absorption and conversion of energy into heat in water. Meanwhile, acoustic signals operate at low frequencies, which enables them to be transmitted and received over long distances.
This study is conducted with the aim of investigating the domain of underwater wireless sensor networks and provide comprehensive insight into UWSNs requirements, platforms, recent advances, taxonomy and challenges of UWSNs.
Additionally, this paper offers the newest evidence for various aspects that can satisfy the requirements for rapid development of UWSNs.
The contributions of this paper are summarized as follows:
- Present a brief compilation of motivation for UWSNs and its significance.
- Identify and describe the key requirements to achieve essential procedures of implementing UWSNs.
- Investigate and present required platforms for developing robust UWSNs applications.
- Propose a thematic taxonomy to classify existing literature based on the most important parameters and comprehensively investigate recent advances solutions to get details concept and technical aspects.
- Highlight open research challenges of UWSNs as a guideline for future research to drive innovative development in various fields.
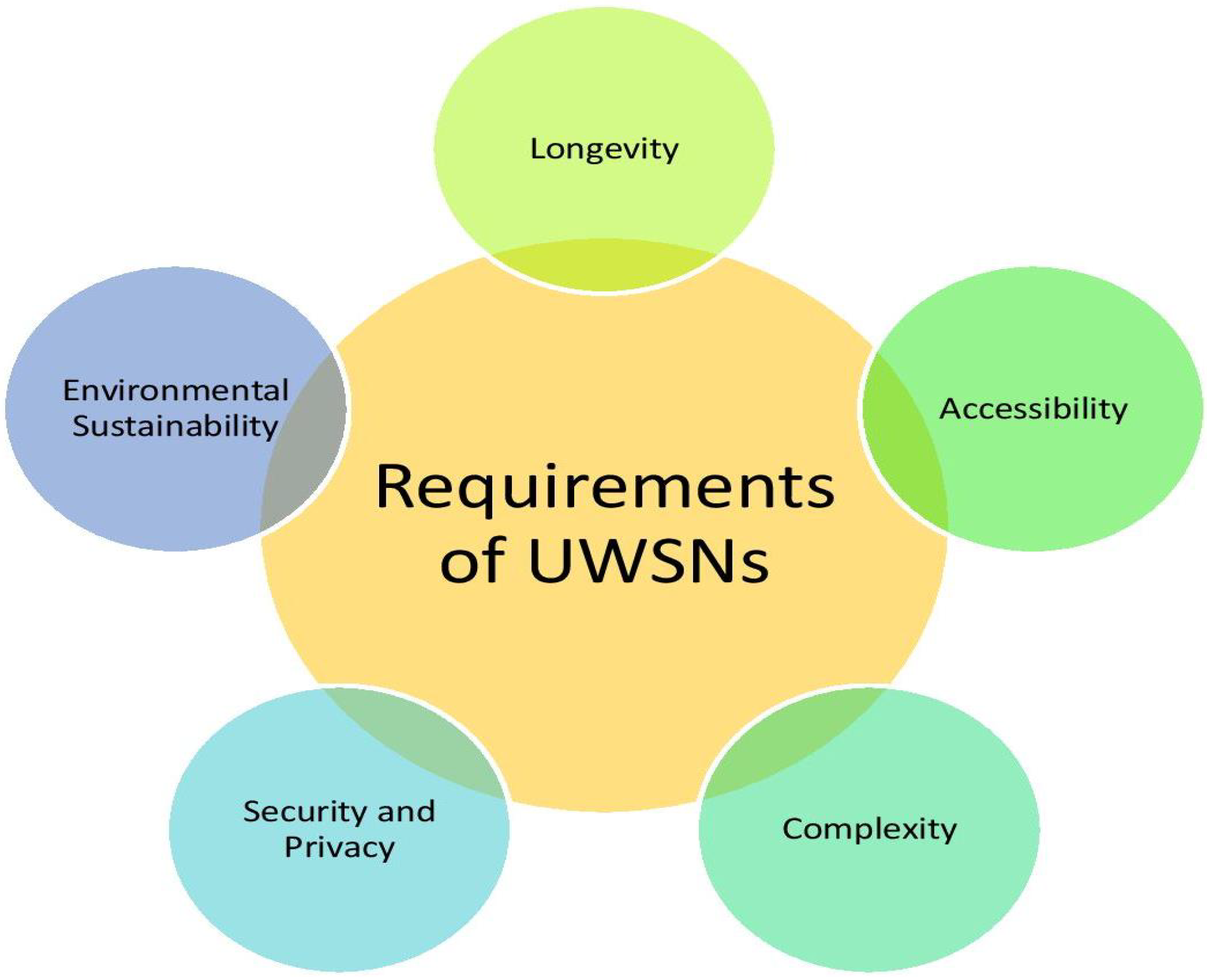
2. Requirements of UWSNs
Figure 2 represents these requirements of UWSNs.
2.1. Longevity
Network lifetime is one of the key requirements of UWSNs. It has a significance impact on the cost, time, maintenance tasks and performing underwater sensor nodes. It is crucial for maximizing the network lifetime, especially for mobile sensor nodes operations. Therefore, firmware has a vital responsibility in ensuring an effective practice of hardware features such as sleep modes, allows interruptions to replace polling and easy to set up. In addition, routing protocol and deployment of nodes have a huge role in controlling the energy consumption. It leads to a significant amount of research works on the development and evaluation processes.
2.2. Accessibility
Each sensor node communicates to each other within a communication range located in the region. The communication range is another important requirement for UWSN which affect the density of nodes, deployment feasibility and the network cost of the targeted monitoring area. There are two communication modes for underwater sensor networks; Acoustic and Optical communication. Underwater acoustic wireless communications have been one of the most used technology as it is accessible and requires communication over great distances. However, acoustic waves still have many shortcomings including scattering, excessive delay because of the low propagation velocities, high attenuation, low bandwidth, and adverse effects on the underwater creatures. Recently, orbital angular momentum has developed as an alternative multiplexing freedom to encrypt data onto vortex beams for enhancing the capacity of acoustic communication [4]. Due to the limitations of acoustic communication, another approach is to use optical waves. According to [5], the current research on underwater optical communications focus on expanding the data rate and transmission range. Optical waves have the advantage of higher data rate, low latency, and energy efficiency at the expense of limited communication ranges.
2.3. Complexity
The specification of sensor node placement at the position is also crucial for UWSN. Thus, a complexity factor need to be considered before setting up the networking platform which incorporates physical aspect, firmware and network configuration of nodes placement. Additionally, routing protocol selection and computing complexity contributes in identifying routes dynamically with no added information or prior knowledge about other nodes. Apart from that, node algorithm complexity is another factor that need to be considered since it influences the energy optimization of the nodes. Local nodes’ energy consumption is correspondingly depending on computational complexity and transmission power aspects. Underwater acoustic channel complexity such as multipath, Doppler shift, considerable attenuation and a high delay are also requirements that affect the performance of node localization methods.
2.4. Security and Privacy
UWSNs is correlated with security and privacy factors which related to sensor nodes connectivity, synchronization, and data transaction tasks. The dynamic features of underwater environment and its environment expose the network to various treats and malicious attacks. It is required for the networks to create trust before all the nodes can securely connect to the network to allow communication for information exchange. It is essential to study what level of security due to the increased computational load and the amount of transmitted data, yet consuming more energy within the network.
2.5. Environmental Sustainability
The deployment of communication technologies in UWSN is required to consider the impact to environment and wildlife. Ref. [6] reported that wildlife is influenced to ambient and boat noise which can lead to stress and the rise of extinction risk. Moreover, marine environment with increasing noise can generate behaviour changes, population distribution and hearing impairment of fish species.
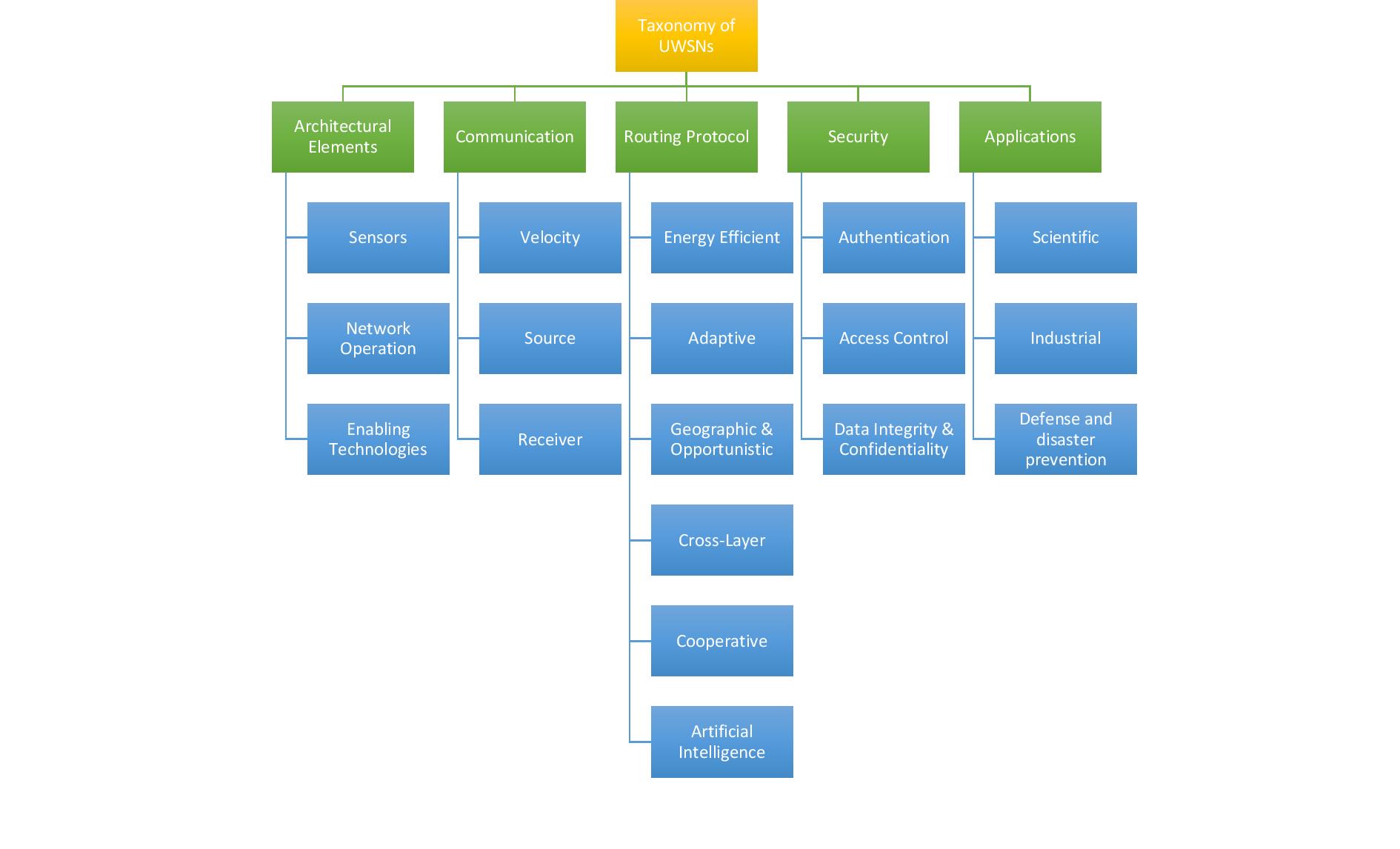
3. Thematic Taxonomy of UWSNs
This paper proposes a taxonomy based on surveys and trend analysis of credible articles in the last five years. The most frequent topics discussed in the literature review is also taken into account before devising the thematic taxonomy. Figure 3 depicts a thematic taxonomy of UWSNs to better understand its characteristics. It categorizes the key attributes according to Architectural Elements; Communication; Routing Protocol and Standards; Security; and Applications.
4. Conclusions and Future Remarks
A unique design and characteristics of underwater sensor networks provide advantages in the development of scientific, industrial, defense, and disaster prevention applications, which are dissimilar with terrestrial sensor networks. However, the features of UWSNs and application requirements restrict their use and reveal the gap between applications and technologies. This study shows the essence of acoustic communication as an elementary principal for designing and executing the algorithms, protocols, and services in UWSNs to manage such limitations. First, we investigated the state-of-the-arts in the literature related to UWSNs. We then determined the requirements of UWSN, and provided a thematic taxonomy. This paper analyses the literature from trusted and well-known article databases. Investigation of these classifications assist us to identify the challenges for future improvement and open more opportunities for long-term success in the field of underwater sensor networks.
Even though UWSNs have received a great number of improvements in the previous few years, there is still substantial room for improvement, especially in implementing systems on a large scale. As future work, the researchers can offer better solutions on node mobility with high monitoring area (with high neighbourhood range) scenarios to investigate the effect on network connectivity, coverage, energy consumption and network lifetime. To increase efficiencies of the UWSNs and improve its performance, the studies should direct the focus of the prospective research towards implementing cooperative control among a few underwater vehicles. The future studies should enhance the cooperative communication of the vehicles in terms of channel bandwidth and autonomy level (such as covering a re-planning decision). Simultaneously, the subsequent studies could analyze the environment and underwater vehicles models to enable the algorithm to have a wider range of applications. Next, the researchers can plan to develop the significant high-level planning layer to designate the desired configurations or strategic region of interest that the vehicle ought to explore towards. The works could also cover more complex network scenarios including mobility, shadowing, multi-path fading and evaluate how it influences the results. Finally, a hybrid harvesting energy strategy for ocean environment monitoring needs to be taken into consideration, to harvest and apply more reliable renewable energies in the hostile marine environment.
This entry is adapted from the peer-reviewed paper 10.3390/s20185393
References
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279.
- Maindalkar, A.A.; Ansari, S.M. Design of Robotic Fish for Aquatic Environment Monitoring. Int. J. Comput. Appl. 2015, 117, 31–34.
- Domingo, M.C. An overview of the internet of underwater things. J. Netw. Comput. Appl. 2012, 35, 1879–1890.
- Jiang, X.; Shi, C.; Wang, Y.; Smalley, J.; Cheng, J.; Zhang, X. Nonresonant Metasurface for Fast Decoding in Acoustic Communications. Phys. Rev. Appl. 2020, 13, 014014.
- Saeed, N.; Celik, A.; Al-Naffouri, T.Y.; Alouini, M.S. Underwater optical wireless communications, networking, and localization: A survey. Ad Hoc Netw. 2019, 94, 101935.
- Codarin, A.; Wysocki, L.E.; Ladich, F.; Picciulin, M. Effects of ambient and boat noise on hearing and communication in three fish species living in a marine protected area (Miramare, Italy). Mar. Pollut. Bull. 2009, 58, 1880–1887.