Identifying the factors that control the dynamics of pedestrians is a crucial step towards modeling and building various pedestrian-oriented simulation systems. Several approaches have been proposed by researchers to predict pedestrians’ movement characteristics using different methods and techniques. Based solely on experimental evidence, in this work, we isolate the factors that influence the interactions between pedestrians in single-file movement. With artificial neural networks, we canapproximate the fitting function that describes pedestrians’ movement without having modeling bias.Our analysis is focused on the distances and range of interactions across neighboring pedestrians.
- artificial neural networks
- pedestrian dynamics
- modeling
- simulation
- traffic and crowd dynamics
- single-file movement
1. Introduction
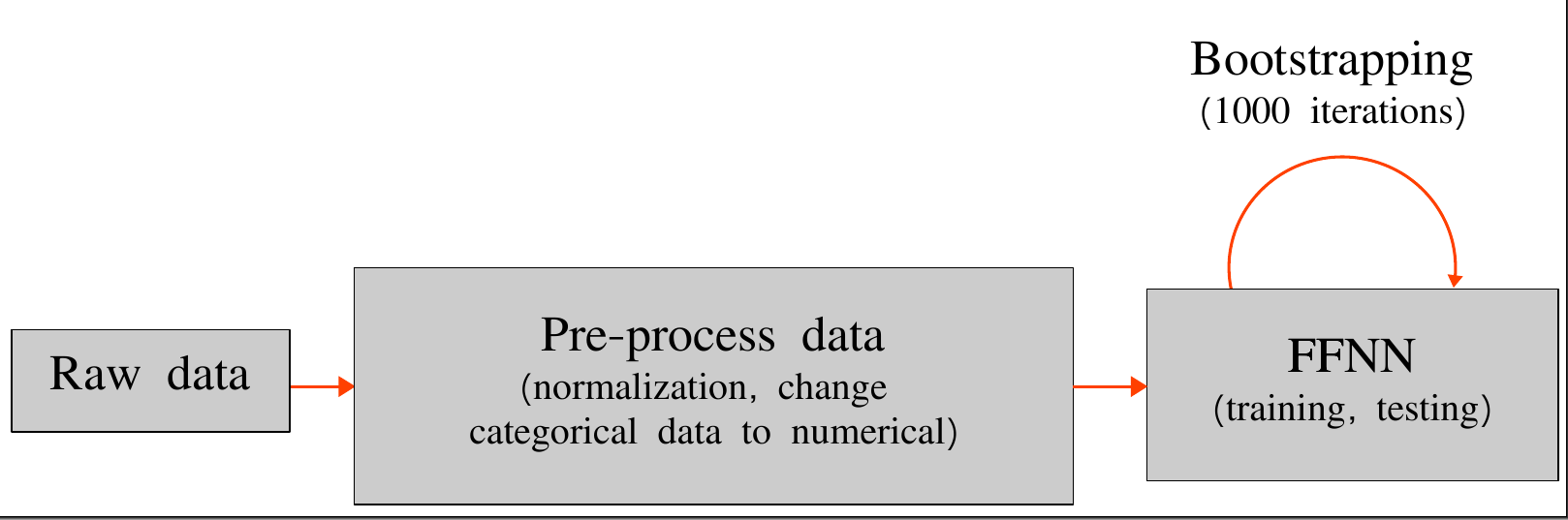 Figure 1. The methodology followed in developing the algorithms for speed prediction. In the pre-processing step, we change the categorical to numerical values and normalize the data between [0, 1] to have the same scale of values (an important step before training for artificial neural networks).
Figure 1. The methodology followed in developing the algorithms for speed prediction. In the pre-processing step, we change the categorical to numerical values and normalize the data between [0, 1] to have the same scale of values (an important step before training for artificial neural networks).2. Approaches to Model Pedestrian Dynamics
2.1. Physics-based approaches
2.2 Data-based approaches
3. Single-file movement experiments
Single-file movement experiments are a simple setup that allows easily controlling of the influential factors to investigate pedestrian movement. The figure below illustrates single-file experiments performed at the Arab American University in Palestine [21]:
 Figure 1. Snapshots from Palestine experiments. Left: UM experiment,N=20. Right: UX experiment, N=24.
Figure 1. Snapshots from Palestine experiments. Left: UM experiment,N=20. Right: UX experiment, N=24.
4. Results and Analysis
Our research aims to investigate the influence of the follower, predecessor, and second predecessor pedestrians’ headway distances on the speed behavior of a pedestrian. The investigation examines the isotropic nature of the interaction behavior, considering that a pedestrian interacts not only with pedestrians in their field of vision to regulate the speed but also with the pedestrians behind.
Interestingly, in Figure 2 we can see that the combination of distance with the pedestrian in front and right behind improves the speed prediction compared to the combination of headway distances in front. From observing experiments’ videos, we notice that the pedestrians in relatively high densities start to adjust their speed when they approach the nearest neighbors to avoid colliding. This result demonstrates that the interaction behavior is not strictly anisotropic in single-file movement, contrary to classical modeling approaches assuming that the front distances only influence the speed.
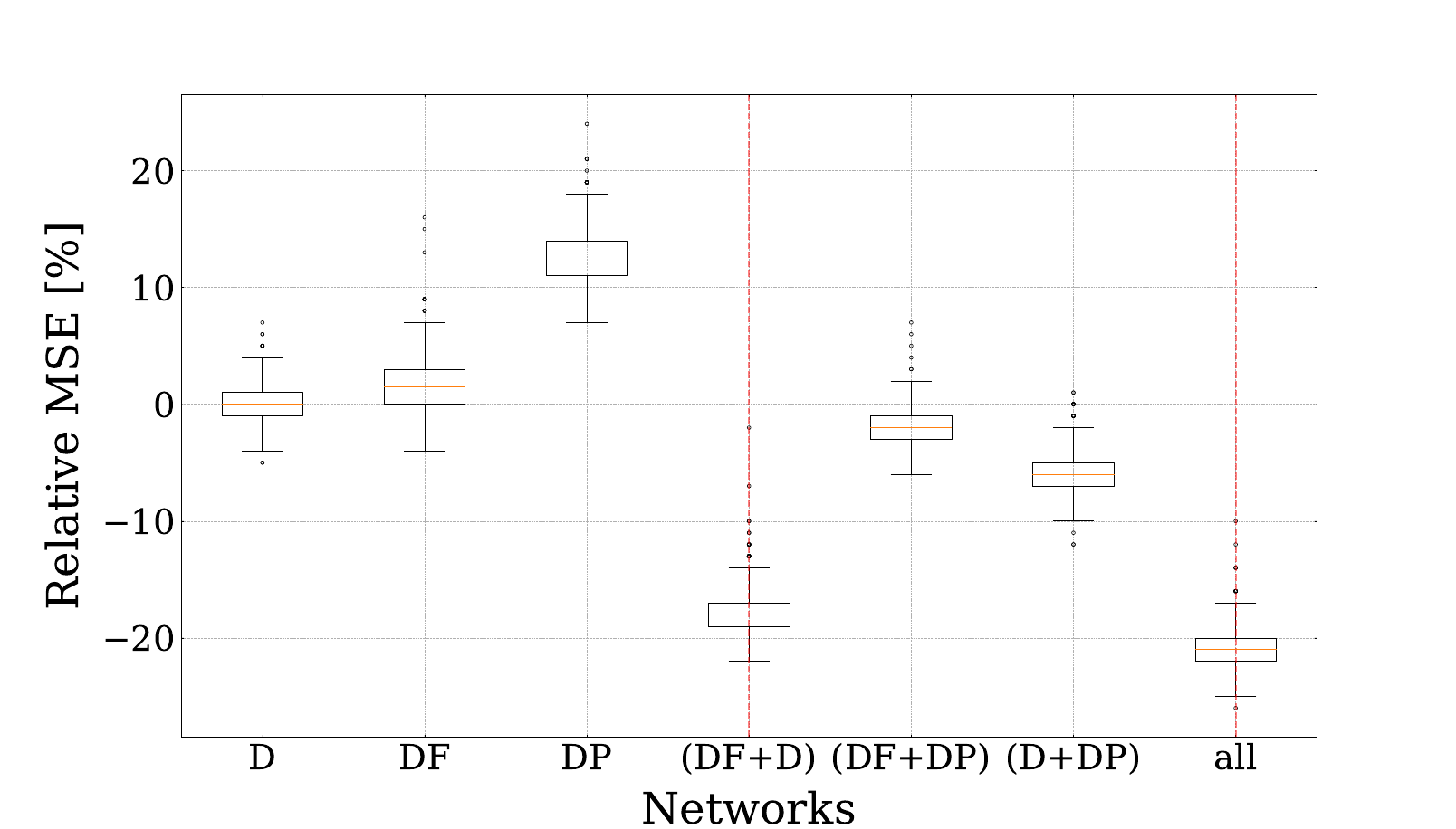 Figure 2. Boxplots represent the training MSE results of the algorithms using UX, N=20, 24, 30 samples with complexity (3,2). The x-axis represents the algorithm inputs we applied, and the y-axis denotes the relative MSE calculated with D-input algorithms as a reference case.
Figure 2. Boxplots represent the training MSE results of the algorithms using UX, N=20, 24, 30 samples with complexity (3,2). The x-axis represents the algorithm inputs we applied, and the y-axis denotes the relative MSE calculated with D-input algorithms as a reference case.
This entry is adapted from the peer-reviewed paper 10.3390/app12157563
References
- Isabelle Maroger; Noelie Ramuzat; Olivier Stasse; Bruno Watier; Human Trajectory Prediction Model and Its Coupling With a Walking Pattern Generator of a Humanoid Robot. IEEE Robotics and Automation Letters 2021, 6, 6361-6369, 10.1109/lra.2021.3092750.
- Dong, H.; Zhou, M.; Wang, Q.; Yang, X.; Wang, F.Y. State-of-the-art pedestrian and evacuation dynamics. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1849–1866.
- Chraibi, M.; Tordeux, A.; Schadschneider, A.; Seyfried, A. Modelling of pedestrian and evacuation dynamics. In Encyclopedia of Complexity and Systems Science; Springer: Berlin/Heidelberg, Grmany, 2018; pp. 1–22.
- Karamouzas, I.; Skinner, B.; Guy, S.J. Universal power law governing pedestrian interactions. Phys. Rev. Lett. 2014, 113, 238701.
- Tordeux, A.; Chraibi, M.; Seyfried, A. Collision-free speed model for pedestrian dynamics. In Traffic and Granular Flow’15; Springer: Cham, Switzerland, 2016; pp. 225–232.
- Van Den Berg, J.; Guy, S.J.; Lin, M.; Manocha, D. Reciprocal n-body collision avoidance. In Robotics Research; Springer: Berlin/Heidelberg, Grmany, 2011; pp. 3–19.
- Pellegrini, S.; Ess, A.; Schindler, K.; Van Gool, L. You’ll never walk alone: Modeling social behavior for multi-target tracking. In Proceedings of the 2009 IEEE 12th International Conference on Computer Vision, Kyoto, Japan, 29 September–2 October 2009; pp. 261–268.
- Schadschneider, A. Cellular automaton approach to pedestrian dynamics-theory. In Pedestrian and Evacuation Dynamics; Schreckenberg, M., Sharma, S.D., Eds.; Springer: Berlin/Heidelberg, Germany, 2001; pp. 75–86.
- Rudenko, A.; Palmieri, L.; Herman, M.; Kitani, K.M.; Gavrila, D.M.; Arras, K.O. Human motion trajectory prediction: A survey. Int. J. Robot. Res. 2020, 39, 895–935.
- Alahi, A.; Goel, K.; Ramanathan, V.; Robicquet, A.; Fei-Fei, L.; Savarese, S. Social lstm: Human trajectory prediction in crowded spaces. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 961–971.
- Helbing, D.; Molnar, P. Social force model for pedestrian dynamics. Phys. Rev. E 1995, 51, 4282.
- Xue, H.; Huynh, D.Q.; Reynolds, M. Bi-prediction: Pedestrian trajectory prediction based on bidirectional LSTM classification. In Proceedings of the 2017 International Conference on Digital Image Computing: Techniques and Applications (DICTA), Sydney, Australia, 29 November–1 December 2017; pp. 1–8.
- Hasan, I.; Setti, F.; Tsesmelis, T.; Del Bue, A.; Galasso, F.; Cristani, M. MX-LSTM: Mixing tracklets and vislets to jointly forecast trajectories and head poses. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 6067–6076.
- Lerner, A.; Chrysanthou, Y.; Lischinski, D. Crowds by example. In Proceedings of the Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2007; Volume 26, pp. 655–664.
- Alexandre Alahi; Kratarth Goel; Vignesh Ramanathan; Alexandre Robicquet; Li Fei-Fei; Silvio Savarese; Social LSTM: Human Trajectory Prediction in Crowded Spaces. 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2016, 0, 961-971, 10.1109/cvpr.2016.110.
- Alexandre Alahi; Kratarth Goel; Vignesh Ramanathan; Alexandre Robicquet; Li Fei-Fei; Silvio Savarese; Social LSTM: Human Trajectory Prediction in Crowded Spaces. 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2016, , , 10.1109/cvpr.2016.110.
- Tordeux, A.; Chraibi, M.; Seyfried, A.; Schadschneider, A. Prediction of pedestrian dynamics in complex architectures with artificial neural networks. J. Intell. Transp. Syst. 2020, 24, 556–568.
- Tkachuk, K.; Song, X.; Maltseva, I. Application of artificial neural networks for agent-based simulation of emergency evacuation from buildings for various purpose. In Proceedings of the IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2018; Volume 365, p. 042064.
- Ma, Y.; Lee, E.W.M.; Yuen, R.K.K. An artificial intelligence-based approach for simulating pedestrian movement. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3159–3170.
- Weidmann, U. Transporttechnik der fußgänger: Transporttechnische eigenschaften des fußgängerverkehrs, literaturauswertung. In IVT Schriftenreihe; ETH Zurich: Zurich Switzerland, 1993; Volume 90.
- Rudina Subaih; Mohammed Maree; Mohcine Chraibi; Sami Awad; Tareq Zanoon; Experimental Investigation on the Alleged Gender-Differences in Pedestrian Dynamics: A Study Reveals No Gender Differences in Pedestrian Movement Behavior. IEEE Access 2020, 8, 33748-33757, 10.1109/access.2020.2973917.