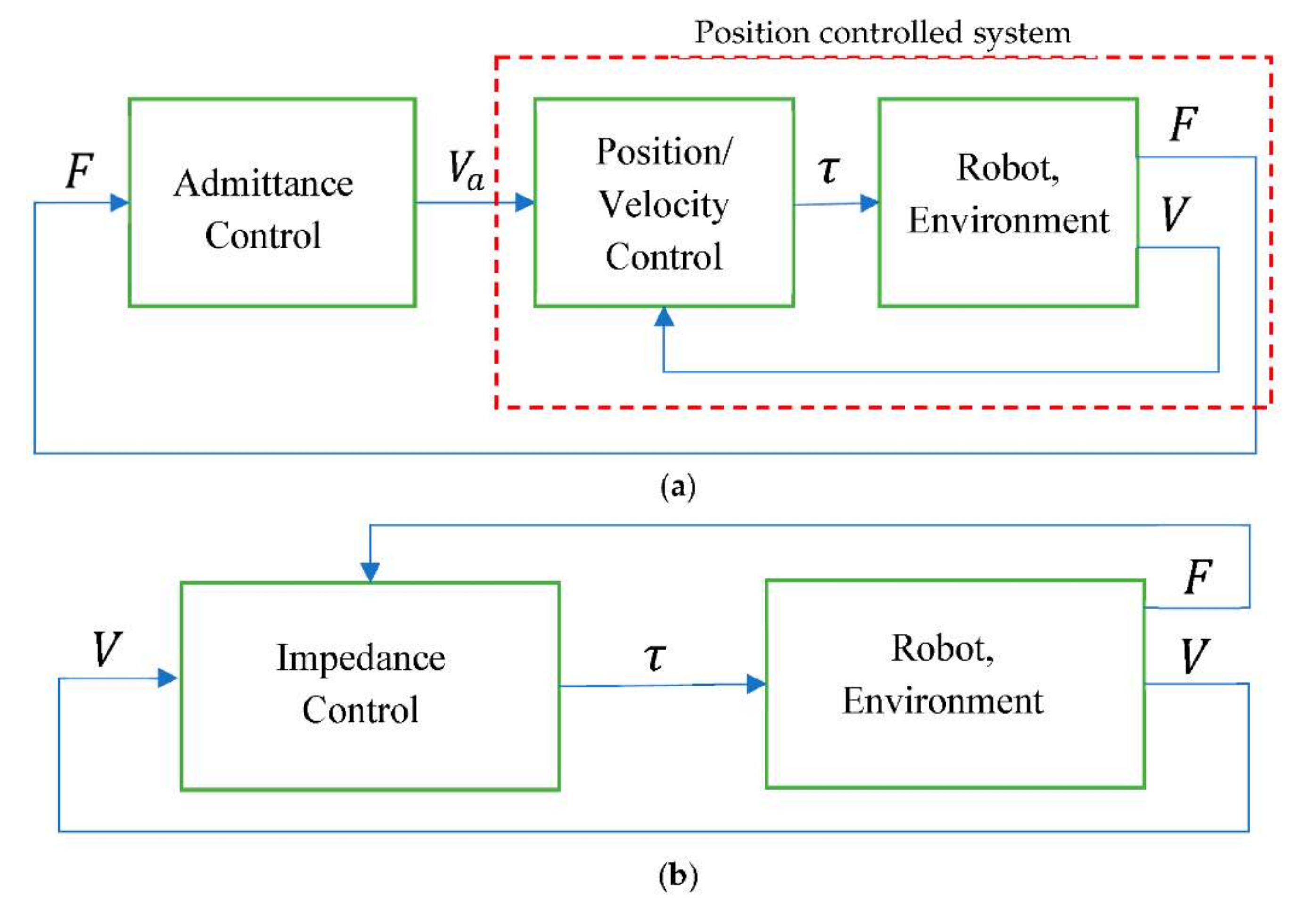
For a relatively specific case where the inertia and damping matrices are decoupled with respect to the world coordinates, Equation (2) is written in the following form:
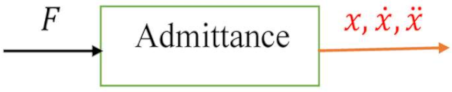
Here, the admittance controller is reviewed, particularly the VA controller in co-manipulation tasks, where either the virtual inertia m or the virtual damping c or both of them are adjusted for facilitating the robot’s cooperation with the human, as presented in Figure 2.
Figure 2. The VA control system for facilitating the human–robot co-manipulating task.
3. Methods for VA Control System in Co-Manipulation Tasks
In this section, the developed methods for the VA controller are presented whether the virtual damping parameter or the virtual inertia parameter is only adjusted, or both are adjusted simultaneously.
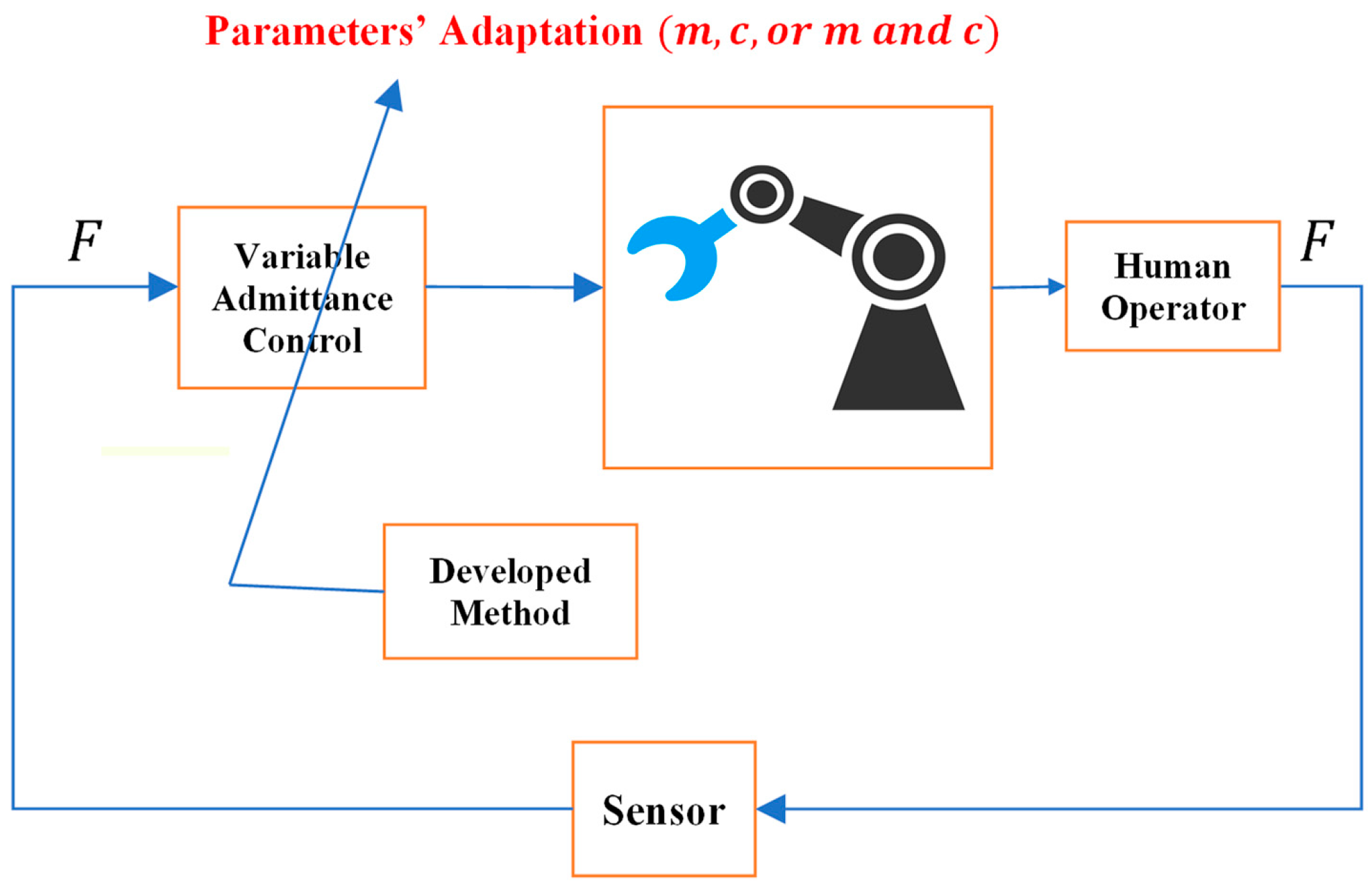
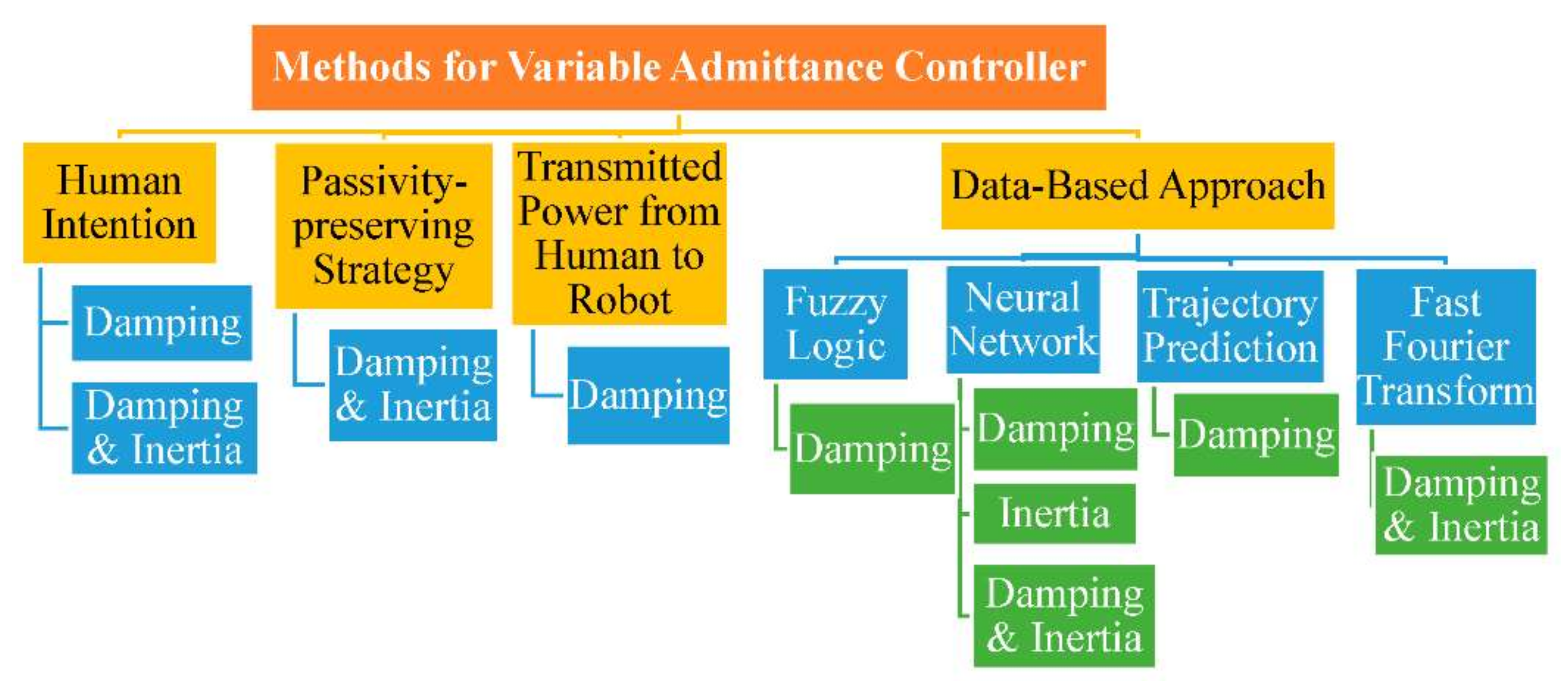
Parameters of VA controllers are adjusted based on different techniques such as human intention, passivity-preserving strategy, transmitted power from human to robot, and data-based approaches such as fuzzy logic, neural network, trajectory prediction, and online and fast Fourier transform (FFT) of measured forces
[15][16][17][18][19][20][21][22][23][24][25][26][27][28][29]. These classifications are presented in
Figure 3.
Figure 3. The classifications of the used techniques for developing VA control whether adjusting the damping only, the inertia only, or both the damping and inertia.
Inference of human intention was the basis of the following works. Duchaine and Gosselin
[16] improved the intuitivity of humans considering only the adjustment of the virtual damping. They developed their VA control using the time derivative of the applied force, and after that it was used for inferring the human’s intentions. Lecours et al.
[25] developed a VA control in which both the virtual damping and the virtual inertia were adapted. Their controller was implemented using the human intentions’ inference and by considering the desired operator’s velocity and acceleration. The drawbacks of the above two approaches are the necessity for numerical differentiations that make noisy signals, which in turn require filtering that causes delays. In
[20], Topini et al. implemented a VA control where both the virtual inertia and the virtual damping were adapted online to the motion intention of the user. Their system followed the same approach presented with Lecours et al.
[25]. However, the field of application was different. In addition, the desired reference force or the source of such a force reference value were not provided by Lecours et al.
[25].
The strategy of passivity-preserving was used to adapt the parameters of robot admittance control. TSUMUGIWA et al.
[24] presented a method to adjust both virtual damping and inertia considering the passivity index and an ultimate value of the applied force by human. In their strategy, the passivity index was used for identifying the process of working from other processes, viz energy transferring between human and robot during the collaboration. In a case where the passivity index was a positive value and this value exceeded a defined threshold, the human provided the robot with the energy for executing the collaboration’s task. This passivity index was also used to detect the whole human’s working process. After that, the ultimate applied force value was used to divide the whole working process into four parts. Then, proper characteristics of admittance control were applied to each part. A passivity-preserving strategy was also proposed by C. T. Landi et al., in
[27], where they adjusted the virtual inertia parameter of the admittance control for removing the oscillations with high frequency and restoring the desired model of interaction. Furthermore, the virtual damping parameter was adjusted based on a constant damping to inertia ratio for preserving a similar system dynamics after the adjustment, which has more intuitivity for humans
[25].
Data-based methods like fuzzy logic and neural networks were also developed. Fuzzy logic-based methods were proposed by the following research works. Z. Du et al.
[22] developed a hybrid VA model based on a learning of type fuzzy Sarsa (λ), considering the rotational movement about a single axis, for obtaining intuitive and natural interaction along the pose adjustment of minimal invasive surgery manipulators. Dimeas and Aspragathos
[23] proposed a method in which the process of human-like decision making was combined with an adaptation fuzzy inference algorithm. The measured robot velocity and the applied human force were the inputs to their method, whereas the online adjusted virtual damping parameter was the output. Their fuzzy inference system was adapted using the fuzzy model reference learning controller. The minimum jerk trajectory model was the basis of this learning, and the expert knowledge must be found for the intuitive collaboration.
Neural networks (NNs) were also used for adapting the parameters of robot admittance control systems. In
[15][28][29], Sharkawy et al. proposed a multi-layer feedforward neural network (MLFFNN) that online trained for adjusting only the virtual damping parameter or only the virtual inertia parameter of the admittance control. The training occurred depending on the error backpropagation algorithm and considering an error representing the difference between the actual robot’s velocity and the desired minimum jerk trajectory velocity. In
[17], both the virtual damping and inertia were adjusted online and simultaneously by the use of Jordan recurrent NNs. The network was indirectly trained by the real-time recurrent learning considering the error between the actual robot’s velocity and the desired minimum jerk trajectory velocity. In these approaches, the need to expert knowledge for the intuitive collaboration was not found and this is desirable. In
[18], a method was developed to allow the robot for interacting with the unknown environment. An observer in the robot joint space was employed for estimating the interaction torque. The admittance control was adopted for regulating the dynamic behavior at the point of interaction during the robot’s collaboration with the unknown environment. A controller based on radial basis function (RBF) was implemented for guaranteeing the trajectory tracking. The cost function was defined for achieving the performance of interaction of the torque regulation and the tracking of trajectory. Additionally, it was minimized by the admittance model’s adaptation.
Based on a trajectory prediction of the human hand motion, Wang et al.
[21] proposed a VA control in HRI. In their approach, the robot end-effector’s trajectory under the guidance of the human operator was used to train offline a long- and short-term memory NN (LSTM-NN). After that, the trajectory predictors were used in VA control for predicting online the trajectory as well as the movement direction of the robot’s end-effector. The developed VA controller adjusted the virtual damping to reduce its value in the moving direction.
Another data-based method was developed in
[26]. In
[26], Okunev et al. used an online fast Fourier transform (FFT) of the forces, which were measured using a mounted sensor at the robot’s end-effector. Their method was used for detecting the oscillations and for dynamically adapting the virtual damping and inertia for attenuating the oscillations and improving the experience of haptic interaction of the cooperating human. In addition, they developed a machine-learning method to include the human preferences into the control design. The method was depending on the study of users and their evaluation.
The robotic tasks used by these researchers during the development and the evaluation of their VA controller are discussed in the next section.
4. Accomplished Co-Manipulation Tasks with VA Control
During the development and the evaluation of the VA control, different tasks were proposed and accomplished by the researchers. These tasks are classified into two main categories as follows:
(1) The collaborative co-manipulation tasks in which the human effort and oscillations should be reduced.
- (2)
-
The rehabilitations tasks in which the robot should apply high force and assist the human, or in other cases the robot should leave the patient to act alone.
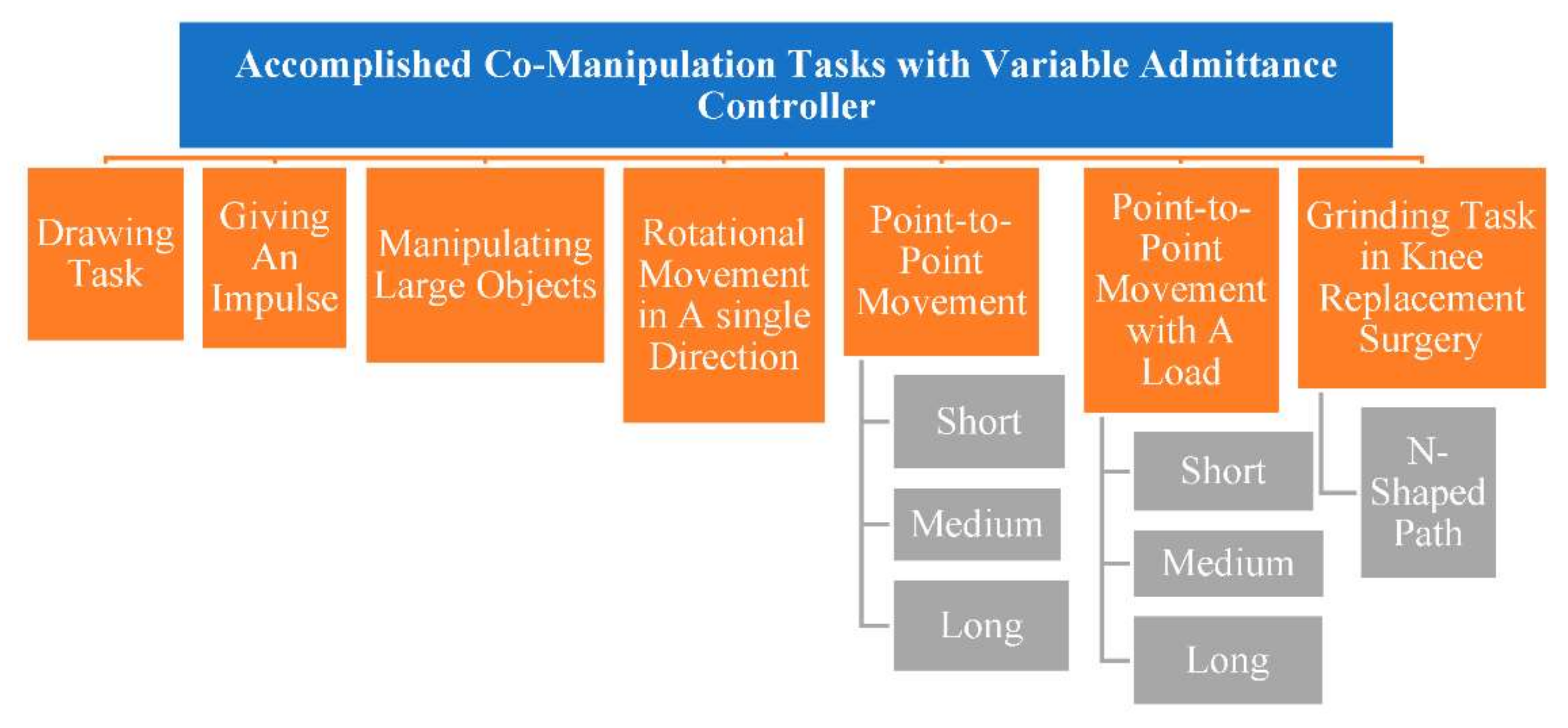
The classifications of the collaborative co-manipulation tasks are presented in Figure 4.
Figure 4. The robotic tasks accomplished during the development and the evaluation of the VA control that appeared in the literature.
Collaborative co-manipulation tasks, such as pick and place task, point-to-point movement, drawing task, and manipulating of large objects, were proposed with the following research works. Duchaine and Gosselin
[16] designed their VA control system for the collaborative pick and place task as well as the drawing task. With Lecours et al.
[25], the drawing task as well as giving an impulse for the assisting device were their accomplished tasks to develop and evaluate the variable controller. In
[24], TSUMUGIWA et al. executed the point-to-point movement as the desired task for developing and evaluating their VA controller. The task achieved by Sidiropoulos et al.
[19] to develop and evaluate their VA control system was the manipulating of large objects with high inertia.
The rotational movement of a joint of a minimally invasive surgical manipulator between two targets in a single direction was used as the proposed task with Z. Du et al.
[22]. In
[23], Dimeas and Aspragathos developed their VA control system for a point to point movement along a single direction of the Cartesian robot workspace. Their VA control was evaluated using different movements; short, medium, and long distances. Sharkawy et al.
[15][17][28][29] developed and designed their VA control system for a point-to-point movement along a single direction of the Cartesian robot workspace. In addition, their VA control was evaluated using different movements; short, medium, and long distances. In
[29], the VA control was evaluated by mounting a load or an object of 1 kg to the robot’s end-effector for simulating the transferring process of an object from a place to another guided by the human. The motion was also along straight-line segment (short, medium, and long distances). Furthermore, the VA control was tested and investigated along different axis of motion and along straight-line segment. Wang et al.
[21] developed their VA control for simulating an experiment in which the robot was operated for grinding the prosthesis implantation plane. The selected task path was an N-shaped path covering the plane.
A rehabilitation task was proposed by Topini et al.
[20]. They designed a hand exoskeleton system for interfacing with the VA control for achieving virtual reality-based rehabilitation tasks. The tasks used in their work were free motion and grasping virtual spherical object.
Although different tasks were used with the researchers, other realistic tasks and applications are recommended to be investigated and applied, such as curved and complex motions. Furthermore, the tasks in real (industrial, medical, agriculture, etc.) environments can be achieved.
5. Performance’s Comparison of VA Controllers in Co-Manipulation Tasks
The main used criteria for evaluation of the developed VA control included the following terms:
- (1)
-
The required effort for performing the task.
- (2)
-
The needed time for executing the task.
- (3)
-
The oscillations and the number of overshoots.
- (4)
-
The achieved accuracy.
- (5)
-
The accumulated jerk.
- (6)
-
The opposition of the robot to human forces.
The VA control system developed by Duchaine and Gosselin
[16] was evaluated in terms of the needed time for accomplishing the drawing task and the number of overshoots. Their VA control system was compared with a constant admittance control by help of 6 subjects. By their VA control, the task was achieved rapidly with a smaller overshoots’ number. In addition, the time was improved/reduced by 18.23% compared with the constant admittance controller. The required effort for performing the task and the accuracy were not compared, and the results from a provided questionnaire were not included. The VA control by Lecours et al.
[25] was compared with a low constant admittance controller and high constant admittance controller using the task completion time and the maze overshoots as the main criteria and by the help of six subjects. In the case of performing a drawing task, with their VA controller, it was easy to perform acceleration and fine movements. The needed time for achieving the task was as with the one given by the low constant admittance controller, and 20% lower than the time required by the high constant admittance controller. The overshoot distance provided by their VA controller was as with the one obtained by the high constant admittance controller. In addition, it was five times lower than the obtained one by the low constant admittance control. With the impulse test, their VA controller performed high desired velocity and acceleration, which were similar to the ones obtained by the low constant admittance controller. However, their VA control had less ability for performing fine movements. Furthermore, the velocity decayed more rapidly. This happened because of the higher acceleration result of the VA control law. In both tasks (drawing and impulse), the evaluation of the required human effort was not considered, and subjective results by giving a questionnaire to the participants were missing. In
[20], Topini et al. evaluated their developed VA control with the help of a single trained healthy subject. The results showed that their developed VA control had promising performance while following the free motion of the user. In addition, it was quite suited to rehabilitation applications because of the smooth behavior at low operating frequencies. Statistics about the accuracy, required effort, and completion time were missing. In addition, using only one subject for evaluating the system is not fair or enough. The VA control developed by TSUMUGIWA et al.
[24] was compared with a conventional VA control and with an invariable admittance control by the participation of 10 subjects. These systems were compared in terms of the overshoots and re-increasing of the applied force along the positioning section. It was found that with their developed VA controller, there was no re-increasing in the applied force, no overshoot along the positioning section, and the cooperation was performed smoothly. An overshoot of the applied human force appeared at the positioning section end when the invariable admittance control was used. Re-increasing the applied force was necessary at the beginning of the positioning section when the conventional VA control was used. The generalization and effectiveness ability of their VA controller was not tested and investigated using different movements. In addition, the comparison did not include the accuracy of each controller and the task completion time. The percentage of the improvement of their developed VA control was not calculated. The given questionnaire to the subjects was about the manipulability only. However, the evaluation of the feeling of the required human effort and the feeling of the oscillation was not included. The VA control developed by C. T. Landi et al., in
[27] was evaluated using only a questionnaire. A questionnaire was given to 26 subjects divided into two groups, the first group with 12 users and the other one with 14 users, for the usability evaluation of the system by the use of system usability scale (SUS)
[30]. The SUS score was 81.66% for the first group, and it was 82.88% for the second group. In general, this score was high.
Sidiropoulos et al. in
[19] evaluated their VA control with the help of 10 subjects and based on only the two main criteria: the transmitted energy from human to robot, which represents the required human effort, and transmitted energy by robot to human, which represents the opposition of the robot to the forces of the human. Their results proved that their VA control reduced the human effort by approximately 33% to 46% compared with high constant admittance controller. In addition, their VA controller was compared with the VA control presented in
[31], where the virtual damping was tuned depending on the velocity norm. The results proved that their VA controller has the better efficiency compared with the VA control based on velocity norm
[31]. In addition, the later VA control reduced the human effort by 32%. Indications about the achieved accuracy and task completion time were missing. Furthermore, the subjective results from a questionnaire were not included.
In
[22], the VA controller presented by Z. Du et al. was compared by three different systems, low constant admittance controller, high constant admittance controller, and VA controller based on the torque/force by the participation of 8 subjects. The comparison was in terms of the accuracy, the energy/effort, and the accumulated jerk. Their VA controller achieved better accuracy than the low constant admittance controller. In addition, the mean of the maximum distance after the remove of the interaction torque was decreased by 90.3%. The applied human effort was reduced and improved by 44.3% relative to the high constant admittance control. The smoothness of the cooperation was significantly improved by their variable controller compared with the VA controller based on the torque. Furthermore, the mean of the accumulated jerk in the episode was reduced and improved by 31.4% relative to the VA controller based on the torque. However, the needed time for executing the desired movement was not compared. From the questionnaire given to the subjects, the preferred results were obtained by their VA control system using the main criteria for comparison; the sense of being in control and the naturalness of the motion. The questionnaire did not give any indication about the human required effort feeling during the movement, the vibration and oscillations, and which system the participants prefer. In
[23], Dimeas and Aspragathos developed a fuzzy inference system (FIS) for VA controller. Their trained FIS was compared with the untrained, manually tuned FIS along different movements (short, medium, and long distances) by help of 12 subjects. The comparison included the required human effort and the required time to complete the movement. In short distance, it was found that 1% improvement/reduction in the effort with the trained FIS and this improvement/reduction increases to 7% for the medium distance and finally to 13% for the long distance. The mean completion time in case of the trained FIS is lower compared with the untrained system by 12%. However, the oscillations and the accuracy were not included in the comparison. In addition, it is not a practical way to compare a trained system with untrained one since logically the trained one will achieve the good performance. The comparison with a constant/fixed admittance controller was not also included. The given results from the provided questionnaire to the participants proved that the trained FIS was the preferred system compared with the untrained FIS. The feeling of the human effort during the movement, the accuracy, and the oscillations were not considered in the provided questionnaire.
In
[28], Sharkawy et al. developed a VA controller based on the trained NN system. Their VA controller was included in a comparison with three other constant admittance controllers (low, medium, and high). The comparison was carried out using different movements (short, medium, and long distances) and by the help of 13 subjects. The main criteria for this comparison were the required human effort to move the robot, the needed time for the task, and the obtained accuracy at the target point. With their VA control, it was found that, in the short distance, the required effort and the needed task time were, respectively, improved and reduced by 65.22% and 6.65%, relative to the high constant admittance controller. Its accuracy was improved and increased by 5.30% relative to the low constant admittance controller. In the medium distance, the required human effort and the needed task time were improved and reduced, respectively, by 58.83% and 16.89% with reference to the high constant admittance control. The accuracy was improved and increased by 4.031% with reference to the low constant admittance control. In the long distance, the human effort and the needed time were, respectively, improved and reduced by 63.63% and 15.184% with reference to the high constant admittance control, whereas the accuracy was improved by 3.86% relative to the low constant admittance controller. From the subjective results of the questionnaire given to the subjects, their VA control gave high performance in which the required effort was low, and the accuracy was the highest. Furthermore, it was the preferred system by the subjects. In
[29], the developed VA controller was evaluated by the help of 10 subjects. Their VA controller improved and reduced the required human effort and the needed task time, respectively, by 58.58% and 23.86% with reference to the high constant admittance control, in the short straight-line segment motion. Furthermore, the accuracy was improved/increased by 5.12% relative to the low constant admittance control. In the medium straight-line segment motion, the VA controller improved and reduced the required human effort and the needed task time, respectively, by 51.474% and 24.30% with reference to the high constant admittance control. The accuracy was improved and increased by 5.00% with reference to the low constant admittance control. In case of the long straight-line segment motion, the VA controller improved and reduced the human effort and the needed task time, respectively, by 57.154% and 26.57% with reference to the high constant admittance control. The accuracy was improved and increased by 4.456% with reference to the low constant admittance control. The generalization ability of their VA control was checked by mounting a load or an object on the robot end-effector to simulate a co-manipulating task. In this case, the VA controller improved and reduced the human effort and the needed task time, respectively, by 43.235% and 19.76% when short straight-line segment motion was performed and, respectively, by 51.856% and 22.35% when the medium straight-line segment motion was used and by 58.658% and 22.892% when long straight-line segment motion was performed, relative to the high constant admittance control. The achieved accuracy with their VA controller was improved/increased by 9.678%, 8.576%, and 8.653% when short, medium, and long distance, respectively, were used, relative to the low constant admittance control. In
[17], the VA control, in which both the virtual damping parameter and inertia parameter were adjusted, has the best performance compared with the VA control, where only the virtual damping was adjusted, or the VA control in which only the virtual inertia parameter was adjusted. The comparison was achieved by using 10 subjects.
In
[21], Wang et al. evaluated their developed VA control by comparing it with a constant admittance control considering the operating force and jerk and the trajectory error (accuracy) as the main criteria with the help of two subjects. Their VA controllers reduced the trajectory errors by 51%, and reduced the operating force by 23%, and reduced the operating jerk by 21%. The subjective results from a questionnaire were missing. In addition, using only two subjects was not enough and not fair.
In
[26], the VA controller presented by Okunev et al. was compared through participation of 10 subjects with four constant admittance controllers; the first one has high values, the second one has medium values, the third one has low values and the last one has the lowest values. The comparison was executed using a mobile robot that had two 7-DoF anthropomorphic arms, which hold an aluminum bar. The subjective results were presented only from a provided questionnaire to the participants. The results were about the heaviness and the oscillations using each controller. By comparing their variable controller with the first constant admittance controller, their variable controller was less heavy and more oscillatory. Compared with the second controller, the variable controller was approximately in the same level of heaviness with the second controller, which was less oscillatory. In comparison with the third constant admittance controller, their variable controller was less heavy and oscillatory. By comparing with the fourth constant admittance controller, the fourth controller aborted during the experiments, in which abort means that the number of times the built-in robot security system shut down and the adaptive controller was less oscillatory. However, the measured results from these comparisons were not included, which are more important than the subjective ones.
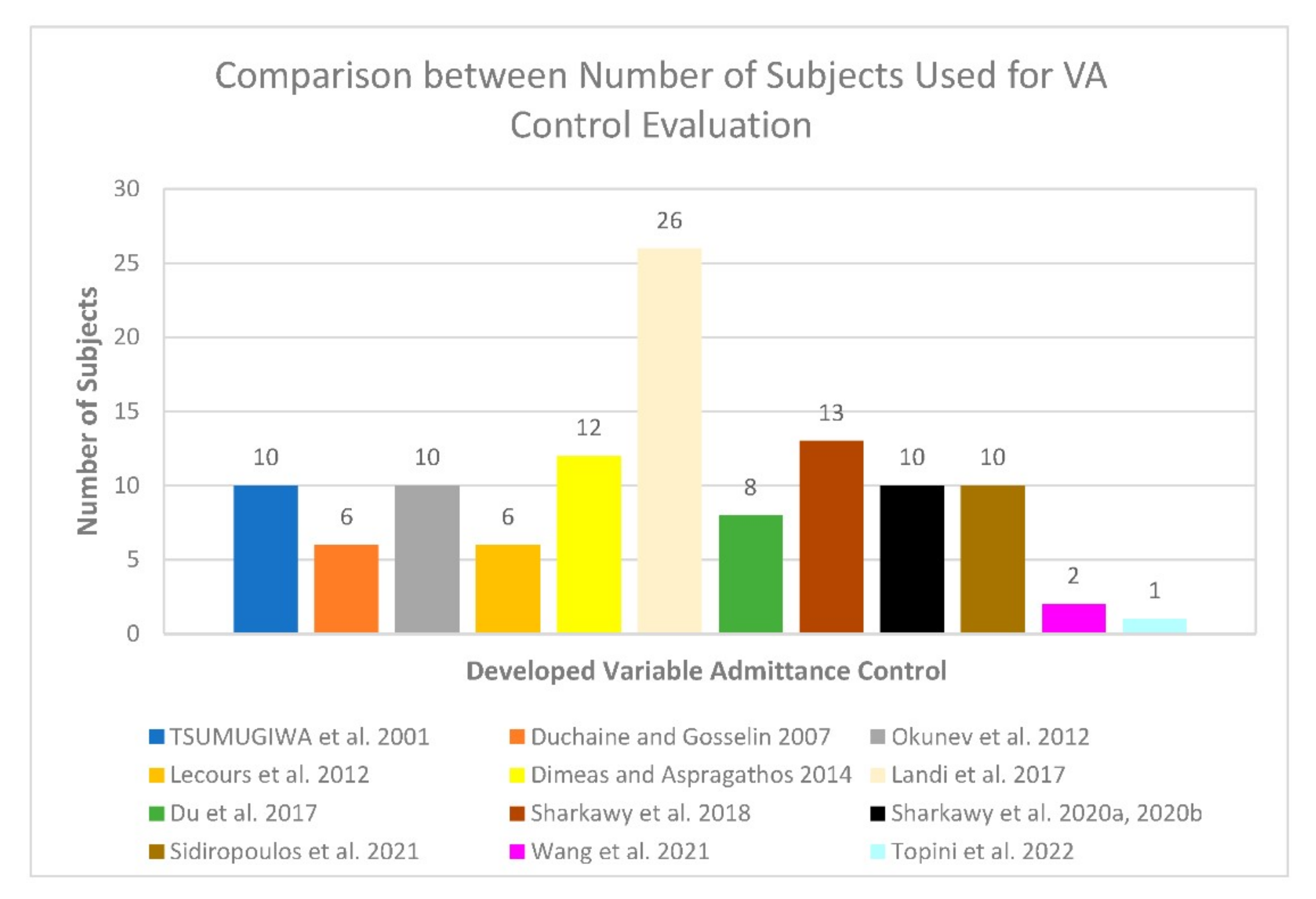
The number of subjects used to evaluate the VA control by researchers can be compared. This comparison is presented in Figure 5. As shown in Figure 5, the number of subjects used by researchers is in the range between 1 to 13, except one research work used 26 subjects to evaluate their VA control system. However, the recommendation is to use more and enough subjects (e.g., more than 30) for the evaluation of VA control for more realistic statistics and results.
Figure 5. The comparison between the number of subjects used to evaluate the developed VA control, according to the literature presented in this subsection.
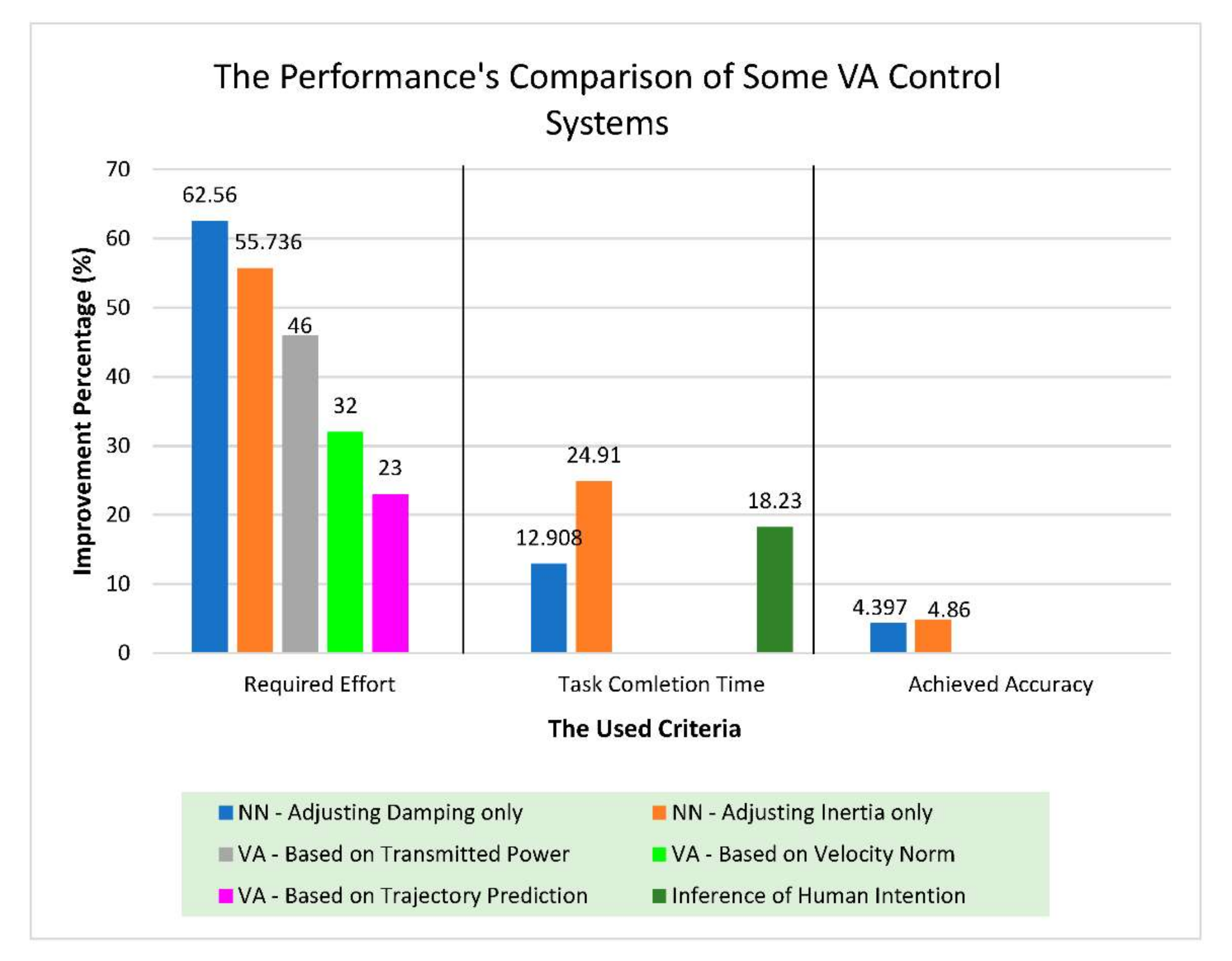
From this discussion, it is difficult to compare the performance of all VA control systems quantitatively because the used criteria and the accomplished tasks with each system are different from the others. In addition, the obtained results with some VA control systems in form of values are missing. However, the researchers present a figure that can compare the performance of the closest VA systems to help the reader to see the difference easily. These systems are as follows:
- (1)
-
The VA control system based on inference of human intention
[16],
- (2)
-
The VA control system depending on transmitted power by human to robot
[19],
- (3)
-
The VA control system based on the velocity norm
[31],
- (4)
-
The neural network-based system to adjust the damping only
[28],
- (5)
-
The neural network-based system to adjust the inertia only
[29], and
- (6)
-
The VA control system depending on the trajectory’s prediction of the motion of a human hand
[21].
This comparison is presented in Figure 6. The percentage of the improvement in the required human effort and time of all systems is relative to high constant admittance control. The percentage of the improvement in the achieved accuracy is relative to low constant admittance control.
Figure 6. The performance’s comparison between some developed VA control systems. The main criteria used are the required human effort, needed task time, and the obtained accuracy.
The good results obtained from these previous works need further investigation by developing new methods for variable admittance control. In addition, as is clear from Figure 6, using a neural network-based approach is promising in improving the performance of the VA control system in a better way. This needs further investigation by applying different types of neural networks as well as deep learning-based techniques.