Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
Robot programming skill classes are becoming more popular. Higher order thinking, on the other hand, is an important issue in developing the skills of 21st-century learners. Truth be told, those two abilities are consistent subjects that are trending in academics.
- robot programming
- higher order thinking
1. Introduction
Robot programming courses continue to emerge [1]. In line with the OECD 2030 Future Skills Report, it has clearly shown that the job in robotics engineering is an important professional field [2]. On the other hand, higher order thinking (HOT) is also an important issue in developing 21st-century learners’ skills [3][4][5][6].
Robot systems typically consist of processing sensor data, perform recognition, and plan their operations using computer programs running on the processor [7][8][9]. Therefore, robot programming is entering a set of instructions that direct the robot to work by taking values from the inputs to generate the outputs [10][11][12][13][14][15]. Additionally, in the programming steps, there is a universally recognized procedure, which consists of: (1) Identifying the problem, (2) Goal setting, (3) Creating the solution, (4) Acting on the solution and (5) Returning to check the results [16][17][18][19][20][21]. The behaviors of the five processes mentioned above all occur because of higher order thinking in the brain [22][23][24][25].
The concept of higher thinking skills became an important educational topic in 1956 when Bloom et al. [26] published the taxonomy of educational objectives and referred to higher thinking skills as analysis, synthesis, and evaluation. Later, in 2001, Bloom’s taxonomy of educational objectives was revised by Anderson et al. [27]. They modified the six levels of Bloom’s cognitive domain [26], but continued to define higher order thinking as starting at the analytic thinking stage. The details are presented in Table 1.
Table 1. Comparison of the old and new cognitive domains.
What the researchers described about “robot programming” and “higher order thinking” was based on the research from various references. Suffice to say, those two skills were consistent.
2. Robot Programming
The OECD [2] has released the 2030 Future of Education and Skills report. It outlines the robot engineer’s job, which requires important skills due to the demand of technology for the future. It also emerged from an analysis of the industrial robotics market that robot software will be used in robot operations to achieve the specific objectives through the computer program coding [28]. It will exponentially grow between 2019 and 2025 due to the adoption of the Internet of Things (IoTs), Artificial Intelligence (AI), and other software technologies [29]. Many educational institutions are now adopting robotic programming as a part of their efforts to enhance students’ higher order thinking skills, beginning with the MIT Media Lab under the supervision of Professor Seymour Papert since 1985 [30]. To date, the use of robot programming processes has often been used in STEM (science, technology, engineering and mathematics) learning management [31][32][33][34].
The researchers investigate the two words “Robot” and “Programming” to determine with clarity the meaning of robot programming skills. Researchers studied the meanings of both words by examining the meanings in scholarly dictionaries. They found that the Oxford Dictionary of Computing defines the term “robot” as “programmable devices consisting of mechanical actuators and sensory organs that are linked to a computer” [35], whereas the Oxford Dictionary of Computer Science defines the term “programming” as “all technical activities involved in the production of a program, including analysis of requirements and all stages of design and implementation. In a much narrower sense, it is the coding and testing of a program from some given design” [36].
From the meanings of the two terms presented above, it can be concluded that robot programming skills refer to “All technical activities related to the production of programs through the coding and testing of the program from the given design to the control of programmable devices consisting of actuators and sensors linked to the computer” [35][36]. This definition is consistent with the programming process synthesized by Lertyosbordin [15] with other academic sources [35][36][37][38][39][40][41][42][43]. The detail of the programming process consists of the following steps:
- (1)
-
Identify the Problem: This refers to understanding the problem and determining the “Input”, “Process” and “Output” components that must be completed in order to solve the problem.
- (2)
-
Design a Solution: This refers to the process of ordering the sequence of algorithms using flowcharts or pseudocodes.
- (3)
-
Coding the Program: This is the way of transforming the commands and procedure sequence from the conceptual design into a programming language.
- (4)
-
Test the Program: This refers to the validation of the syntax of the computer code and the interpretation of the results for the goals of program execution. It also includes testing for hardware compatibility, covering the input and output sections.
- (5)
-
Program Implementation: This refers to the outcomes of the program. This should also be continued by further enhancements.
The researchers have defined the robot programming definition and synthesized the standard programming process [37][38][39][40][41][42][43]. Researchers can then determine the components and indicators of the robot programming skill by applying the coding skills indicator of Surfing Scratcher [44], which was developed based on creating an educational measurement of Griffin [45], combined with the cognitive skills indicating verbs of Schraw and Robinson [46]. In addition, the researchers also analyzed the usage of verbs found in a variety of empirical studies [47][48][49][50][51][52][53] that evaluate cognitive skills in robot control programming tasks. The components and indications of the robot programming skill can then be synthesized as follows:
- (1)
-
Component 1: The ability to solve problems step by step:
-
Describe the problem and the sequence of ways to solve it.
-
Draw the flowcharts or pseudocodes to show the sequence of ways to solve the problems.
-
Change the sequence of steps if the results are not met.
-
Tackle the presented tasks by breaking them down into smaller tasks.
-
Capture the issues that can cause problems to repeat.
-
- (2)
-
Component 2: The ability to create computer programs:
-
Create a program by a computer language from a blank page.
-
Create a program with a single-decision condition.
-
Create a program with the nested structure of decision conditions.
-
Create a variable to control the loop task programs.
-
Create a variable and input data that affect the output.
-
Build your own program from the beginning, until you achieve the objectives.
-
Create a function that can modify parameters.
-
- (3)
-
Component 3: The ability to connect to the robot:
-
Connect the port between the computer and the microcontroller.
-
Create objects for using analog and/or digital signals.
-
Create a graphical user interface (GUI) to display the analog and/or digital inputs.
-
Create a graphical user interface (GUI) for the digital outputs.
-
3. Higher Order Thinking
The concept of higher order thinking skills became an important educational topic when Bloom et al. [26] published the Taxonomy of Educational Objectives and described higher order thinking skills as Analysis, Synthesis and Evaluation. Later, in 1987, Resnick [54] researched the teachings of science and mathematics with an educational theme focusing on higher order thinking among public school students across the United States. The studies have shown that higher order thinking skills are important skills in the scientific thinking process and can be developed from the elementary school level and onward. In addition, Resnick said “Higher order thinking involves a cluster of elaborative mental activities requiring nuanced judgment and analysis of complex situations according to multiple criteria. Higher order thinking is effortful and depends on self-regulation” [54].
This is consistent with Lewis and Smith [55] who concluded that higher order thinking skills are the processes used to respond to situations through critical thinking and problem solving. Moreover, King et al. [56] stated that “Higher order thinking skills include critical, logical, reflective, metacognitive, and creative thinking. They are activated when individuals encounter unfamiliar problems, uncertainties, questions, or dilemmas” [49]. Later, in 2001 Anderson et al. [27] revised Bloom’s Taxonomy of Educational Objectives, pointing out that learners’ thinking characteristics should be divided into two dimensions consisting of the “Knowledge Dimension” and “Cognitive Process Dimension”. They have also modified Bloom et al.’s six stages of cognitive levels [26], but still define higher order thinking as starting at the analytic thinking stage, detailed in Table 1.
From the details of higher thinking skills mentioned above, it can be concluded that higher thinking skills refer to “the intellectual ability from the application of knowledge to the creation of new ideas of one’s own” [26][27][54][55][56]. In this research, researchers used the higher order thinking skills theory based on the revision of Bloom’s cognitive taxonomy of Anderson et al. [27], as the basis for designing the component and indicators. The revision of Bloom’s cognitive taxonomy consists of the details about of “Knowledge Dimensions” and “Cognitive Process Dimensions”, which are as follows:
- (1)
-
The knowledge dimensions:
-
Factual—The fundamental understanding of terminology; scientific terms; labels; lexicon; slang; symbols or representations, and specifics, such as a knowledge of events, individuals, events, and information sources.
-
Conceptual—Knowledge of a subject’s classifications and categories, concepts, theories, models, or frameworks.
-
Procedural—Knowing how to perform a skill, procedure, technique, or methodology.
-
Metacognitive—The method or approach of learning and thinking, being aware of one’s own cognition and being able to control, monitor and regulate one’s own cognitive process.
-
- (2)
-
The cognitive process dimensions:
-
Analyze—Breakdown a component and determine how the parts relate to one another and to an overall concept or purpose by differentiating, organizing, and attributing.
-
Evaluate—Make decisions utilizing criteria and standards by checking and critiquing.
-
Create—Integrate elements to create a coherent or functional whole; reorganize elements to create a new structure or pattern by generating, planning, and producing.
-
The higher order thinking assessment flourished in the 19th century to verify the validity of teaching methods for specific objectives and tried to determine the standard level of learners in each grade [57]. To date, the knowledge and cognitive process assessment has been used as part of building student enthusiasm and leading to the development of learners’ skills in accordance with the learning objectives [58]. Corliss and Linn [59] suggested a method for measuring thinking skills in scientific learning activities, presented in Table 2.
Table 2. Thinking skills in scientific learning activities.
| Level | Science Skills | Learning Activities/Assessment |
|---|---|---|
| Low | Demonstrating knowledge of scientific concepts, laws, theories, procedures and instruments | Recall |
| Define | ||
| Describe | ||
| List | ||
| Identify | ||
| High | Applying scientific knowledge and procedures to solve complex problems | Formulate questions |
| Hypothesize/predict | ||
| Design investigations | ||
| Use model | ||
| Compare/contrast/classify | ||
| Analyze | ||
| Find solutions | ||
| Interpret | ||
| Integrate/synthesize | ||
| Relate | ||
| Evaluate |
From Table 2, researchers found that higher thinking skills can arise in the scientific thinking process, where teachers can measure and assess students’ skills through learning activities. Therefore, the researchers used the higher order thinking skills dimension of Anderson et al. [27], which consists of the knowledge dimension and cognitive process dimension, presented in Table 3.
Table 3. Higher order thinking behaviors.
| Dimension | Analyze | Evaluate | Create |
|---|---|---|---|
| Factual | Select | Check | Generate |
| Conceptual | Relate | Determine | Assemble |
| Procedural | Differentiate | Conclude | Compose |
| Metacognitive | Deconstruct | Reflect | Actualize |
From Table 3, researchers can identify the higher order thinking by these 12 behavior indicators. In addition, in Computational Science, these behaviors refer to a group of competencies known as computational thinking. Selby [60] determines that the relationship of higher order thinking skills is directly linked to computational thinking, which consists of decomposition, abstraction, algorithm design, generalization, and evaluation. The relation is shown in Figure 1.
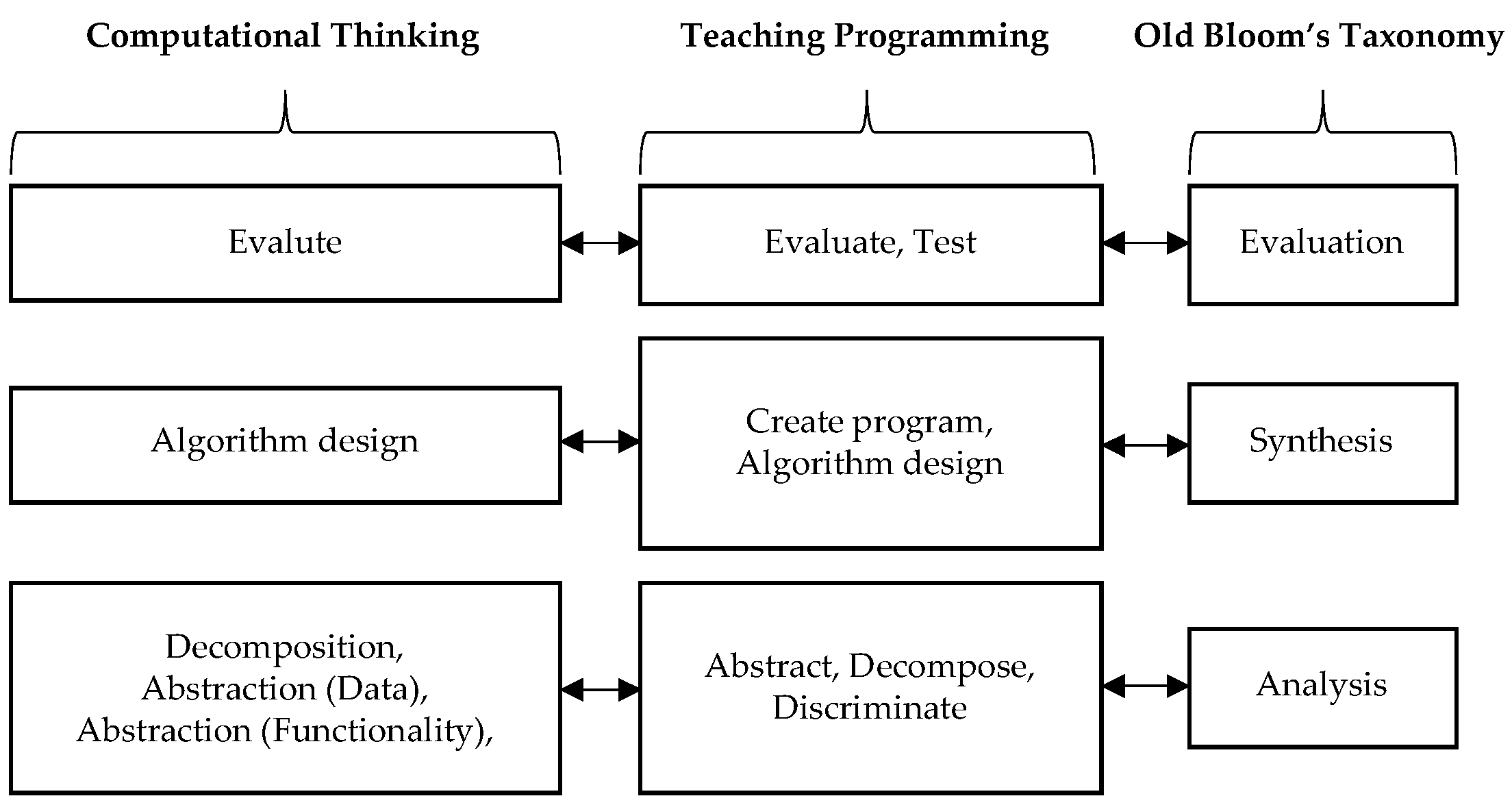
Figure 1. Computational thinking, pedagogy of programming, and Bloom’s old Taxonomy.
From Table 3 and Figure 1, it can be observed that researchers then have the higher order thinking indicators in the programming pedagogy. However, to assess the level of skill for each attribute, it is necessary to have a numerical rating scale to measure the performance. Leighton [61] shows that measurements can be made based on line 0–100 and divided into 5 levels (0–4), shown in Figure 2.
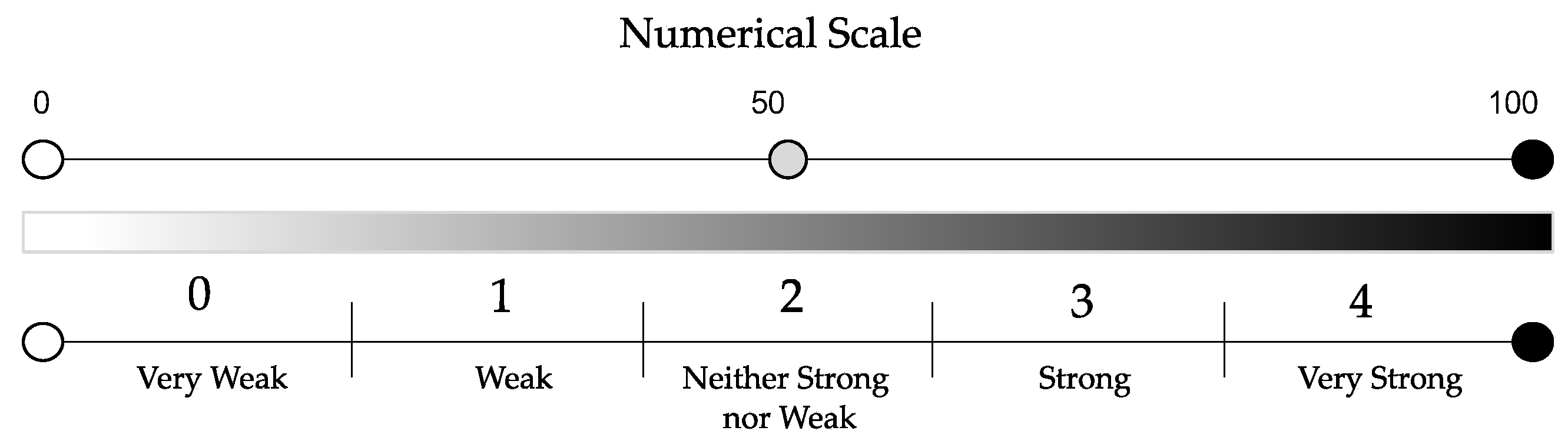
Figure 2. Division of the scale.
The rating scale was divided into five ranges, shown in Figure 2. This corresponds to Likert [62] that supports the design of the rating scale, which should be an odd number (3, 5, 7, …). If researchers consider Figure 2, it can be observed that the teachers should not assess learners by dividing them into only two sides (white and black) because some learners’ abilities are grayed out. Therefore, defining the middle of the scale is another suitable way to assess learners’ abilities more clearly.
This entry is adapted from the peer-reviewed paper 10.3390/asi5030047
References
- Alimisis, D. Educational robotics: Open questions and new challenges. Themes Sci. Technol. Educ. 2013, 6, 63–71. Available online: http://earthlab.uoi.gr/theste/index.php/theste/article/view/119 (accessed on 3 February 2022).
- OECD. SKILLS FOR 2030. OECD Future of Education and Skills 2030 Concept Note. 2019. Available online: www.oecd.org/education/2030-project (accessed on 29 December 2021).
- Almerich, G.; Suárez-Rodríguez, J.; Díaz-García, I.; Cebrián-Cifuentes, S. 21st-century competences: The relation of ICT competences with higher-order thinking capacities and teamwork competences in university students. J. Comput. Assist. Learn. 2020, 36, 468–479.
- Conklin, W. Higher-Order Thinking Skills to Develop 21st Century Learners; Shell Education: Huntington Beach, CA, USA, 2012.
- Widiawati, L.; Joyoatmojo, S.; Sudiyanto, S. Higher order thinking skills as effect of problem-based learning in the 21st century learning. Int. J. Multicult. Multireligious Underst. 2018, 5, 96–105.
- Hafni, R.N.; Nurlaelah, E. 21st Century Learner: Be a Critical Thinking. In Proceedings of the Second of International Conference on Education and Regional Development 2017 (ICERD 2nd), Bandung, Indonesia, 20–21 November 2017; Volume 1.
- Taylor, A.T.; Berrueta, T.A.; Murphey, T.D. Active learning in robotics: A review of control principles. Mechatronics 2021, 77, 102576.
- Jean, A. A brief history of artificial intelligence. Medecine/Sciences 2020, 36, 1059–1067.
- Mouha, R.A. Deep Learning for Robotics. J. Data Anal. Inf. Process. 2021, 9, 63–76.
- Saukkoriipi, J.; Heikkilä, T.; Ahola, J.M.; Seppälä, T.; Isto, P. Programming and control for skill-based robots. Open Eng. 2020, 10, 368–376.
- Herrero, H.; Moughlbay, A.A.; Outón, J.L.; Sallé, D.; de Ipiña, K.L. Skill based robot programming: Assembly, vision and Workspace Monitoring skill interaction. Neurocomputing 2017, 255, 61–70.
- Cheah, C.-S. Factors Contributing to the Difficulties in Teaching and Learning of Computer Programming: A Literature Review. Contemp. Educ. Technol. 2020, 12, ep272.
- Durak, H.Y.; Yilmaz, F.G.K.; Yilmaz, R. Computational Thinking, Programming Self-Efficacy, Problem Solving and Experiences in the Programming Process Conducted with Robotic Activities. Contemp. Educ. Technol. 2019, 10, 173–197.
- Abadi, M.; Plotkin, G.D. A simple differentiable programming language. Proc. ACM Program. Lang. 2020, 4, 1–28.
- Lertyosbordin, C.; Maneewan, S.; Srikaew, D. Components and Indicators of Problem-solving Skills in Robot Programming Activities. Int. J. Adv. Comput. Sci. Appl. 2021, 12, 132–140.
- Department of Computer Science and Statistics. Computer Programming. The University of Rhode Island. 2020. Available online: https://homepage.cs.uri.edu/faculty/wolfe/book/Readings/Reading13.htm (accessed on 3 February 2022).
- Amjo. Six Steps in the Programming Process. Dotnet Languages. 30 June 2018. Available online: https://www.dotnetlanguages.net/six-steps-in-the-programming-process/ (accessed on 3 February 2022).
- Jorge Valenzuela. Computer Programming in 4 Steps. ISTE. International Society for Technology in Education (ISTE). 20 March 2018. Available online: https://www.iste.org/explore/Computer-Science/Computer-programming-in-4-steps (accessed on 3 February 2022).
- School of Computer Science. The Programming Process. University of Birmingham. Available online: https://www.cs.bham.ac.uk/~rxb/java/intro/2programming.html (accessed on 3 February 2022).
- Wikibooks. The Computer Revolution/Programming/Five Steps of Programming—Wikibooks, Open Books for an Open World. Wikibooks. 2021. Available online: https://en.m.wikibooks.org/wiki/The_Computer_Revolution/Programming/Five_Steps_of_Programming (accessed on 3 February 2022).
- Sharma, P.; Singh, D. Comparative Study of Various SDLC Models on Different Parameters. Int. J. Eng. Res. 2015, 4, 188–191.
- Commons, M.L.; Crone-Todd, D.; Chen, S.J. Using SAFMEDS and direct instruction to teach the model of hierarchical complexity. Behav. Anal. Today 2014, 14, 31–45.
- Lysaker, P.H.; Buck, K.D.; Carcione, A.; Procacci, M.; Salvatore, G.; Nicolò, G.; Dimaggio, G. Addressing metacognitive capacity for self reflection in the psychotherapy for schizophrenia: A conceptual model of the key tasks and processes. Psychol. Psychother. Theory Res. Pract. 2010, 84, 58–69.
- Mahoney, M.J.; Kazdin, A.E.; Lesswing, M.J. Behavior modification: Delusion or deliverance? In Annual Review of Behavior Therapy: Theory & Practice; Franks, C.M., Wilson, G.T., Eds.; Brunner/Mazel: New York, NY, USA, 1974.
- Ardini, S.N. Teachers’ Perception, Knowledge and Behaviour of Higher Order Thinking Skills (HOTS). Eternal Engl. Teach. J. 2018, 8, 20–33.
- Bloom, B.S.; Engelhart Max, D.; Furst Edward, J.; Hill Walker, H.; Krathwohl, D.R. Taxonomy of Educational Objectives: The Classification of Educational Goals; Edwards Bros.: Ann Arbor, MI, USA, 1956.
- Anderson, L.W.; Krathwohl, D.R. A Taxonomy for Learning, Teaching, and Assessing: A Revision of Bloom’s Taxonomy of Educational Objectives; Longman: New York, NY, USA, 2001.
- Miho, T.; Katja, A. Future Shocks and Shifts: Challenges for the Global Workforce and Skills Development. April 2017. Available online: https://www.oecd.org/education/2030-project/about/documents/Future-Shocks-and-Shifts-Challenges-for-the-Global-Workforce-and-Skills-Development.pdf (accessed on 29 December 2021).
- Zion Market Research. Robot Software Market—Global Industry Analysis. Zion Market Research. 21 November 2019. Available online: https://www.zionmarketresearch.com/report/robot-software-industry (accessed on 29 December 2021).
- Stacie, S. “In Memory: Seymour Papert,” MIT Media Lab. 20 January 2017. Available online: https://www.media.mit.edu/posts/in-memory-seymour-papert/ (accessed on 29 December 2021).
- Master, A.; Cheryan, S.; Moscatelli, A.; Meltzoff, A. Programming experience promotes higher STEM motivation among first-grade girls. J. Exp. Child Psychol. 2017, 160, 92–106.
- Mcdonald, C.V. STEM Education: A review of the contribution of the disciplines of science, technology, engineering, and mathematics. Sci. Educ. Int. 2016, 27, 530–569.
- Jeong, H.; Hmelo-Silver, C.E.; Jo, K. Ten years of Computer-Supported Collaborative Learning: A meta-analysis of CSCL in STEM education during 2005–2014. Educ. Res. Rev. 2019, 28, 100284.
- Yücelyiğit, S.; Toker, Z. A meta-analysis on STEM studies in early childhood education. Turk. J. Educ. 2021, 10, 23–36.
- Daintith, J.; Wright, E. Robotics; Oxford University Press: New York, NY, USA, 2008.
- Butterfield, A.; Ngondi, G.E.; Kerr, A. Programming; Oxford University Press: New York, NY, USA, 2016.
- Schumacher, J.; Welch, D.; Raymond, D. Teaching introductory programming, problem solving and information technology with robots at West Point. In Proceedings of the Frontiers in Education Conference, Reno, NV, USA, 10–13 October 2001; Volume 2, pp. F1B/2–F1B/7.
- Jawawi, D.N.A.; Mamat, R.; Ridzuan, F.; Khatibsyarbini, M.; Zaki, M.Z.M. Introducing Computer Programming to Secondary School Students Using Mobile Robots. In Proceedings of the 10th Asian Control Conference (ASCC2015), Kota Kinabalu, Malaysia, 31 May–3 June 2015; pp. 1–6.
- Sharma, M.K. A study of SDLC to develop well engineered software. Int. J. Adv. Res. Comput. Sci. 2017, 8, 520–523.
- Suryantara, I.G.N.; Andry, J.F. Development of Medical Record with Extreme Programming SDLC. IJNMT Int. J. New Media Technol. 2018, 5, 47–53.
- Pambudi, W.S.; Suheta, T. Implementation of Fuzzy-PD for Folding Machine Prototype Using LEGO EV3. TELKOMNIKA Telecommun. Comput. Electron. Control. 2018, 16, 1625–1632.
- Jung, H.-W. A study on basic software education applying a step-by-step blinded programming practice. J. Digit. Converg. 2019, 17, 25–33.
- Agamawi, Y.M.; Rao, A.V. CGPOPS: A C++ Software for Solving Multiple-Phase Optimal Control Problems Using Adaptive Gaussian Quadrature Collocation and Sparse Nonlinear Programming. ACM Trans. Math. Softw. (TOMS) 2020, 46, 1–38.
- Surfing Scratcher. Assessment Rubric for Coding. 2 September 2019. Available online: https://surfingscratcher.com/assessment-rubric-for-coding/ (accessed on 7 February 2022).
- Patrick. Griffin, Assessment for Teaching; Cambridge University Press: Cambridge, UK, 2017; Available online: https://books.google.com/books/about/Assessment_for_Teaching.html?hl=th&id=4i42DwAAQBAJ (accessed on 7 February 2022).
- Schraw, G.J.; Robinson, D.H. Assessment of Higher Order Thinking Skills; Information Age Pub.: Charlotte, NC, USA, 2011.
- Paglia, F.L.; Francomano, M.M.; Riva, G.; Barbera, D.L. Educational robotics to develop executive functions visual spatial abilities, planning and problem solving. Annu. Rev. CyberTherapy Telemed. 2018, 16, 80–86.
- Lertyosbordin, C.; Maneewan, S.; Nittayathammakul, V. Development of training model on robot programming to enhance creative problem–solving and collaborative learning for mathematics–science program students. J. Thai Interdiscip. Res. 2018, 13, 61–66. Available online: https://ph02.tci-thaijo.org/index.php/jtir/article/view/126274/95463 (accessed on 7 April 2022).
- Hu, C.C.; Tseng, H.T.; Chen, M.H.; Alexis, G.P.I.; Chen, N.S. Comparing the effects of robots and IoT objects on STEM learning outcomes and computational thinking skills between programming-experienced learners and programming-novice learners. In Proceedings of the IEEE 20th International Conference on Advanced Learning Technologies, ICALT 2020, Tartu, Estonia, 6–9 July 2020; pp. 87–89.
- Kim, S.U. A Comparative Study on the Effects of Hands-on Robot and EPL Programming Activities on Creative Problem-Solving Ability in Children. In Proceedings of the ACM International Conference Proceeding Series, Singapore, Singapore, 15–18 May 2020; pp. 49–53.
- Çınar, M.; Tüzün, H. Comparison of object-oriented and robot programming activities: The effects of programming modality on student achievement, abstraction, problem solving, and motivation. J. Comput. Assist. Learn. 2021, 37, 370–386.
- Angeli, C. The effects of scaffolded programming scripts on pre-service teachers’ computational thinking: Developing algorithmic thinking through programming robots. Int. J. Child-Comput. Interact. 2022, 31, 100329.
- Sarı, U.; Pektaş, H.M.; Şen, Ö.F.; Çelik, H. Algorithmic thinking development through physical computing activities with Arduino in STEM education. Educ. Inf. Technol. 2022, 1–21.
- Resnick, L.B. Education and Learning to Think; National Academy Press: Washington, DC, USA, 1987.
- Lewis, A.; Smith, D. Defining higher order thinking. Theory Into Pract. 1993, 32, 131–137.
- King, F.; Goodson, L.; Rohani, F. Higher Order Thinking Skills • Definition • Teaching Strategies • Assessment; Educational Services Program: Tallahassee, FL, USA, 1998.
- Broadfoot, P.; Black, P. Redefining assessment? The first ten years of assessment in education. In Assessment in Education: Principles, Policy & Practice; Taylor & Francis: Oxfordshire, UK, 2004; Volume 11, pp. 7–26.
- Craddock, D.; Mathias, H. Assessment options in higher education. Assess. Eval. High. Educ. 2009, 34, 127–140.
- Corliss, S.; Linn, M. Assessing learning from inquiry science instruction. In Assessment of Higher Order Thinking Skills; Schraw, G., Robinson, D.H., Eds.; Information Age Pub.: Charlotte, NC, USA, 2011; pp. 219–243.
- Selby, C.C. Relationships: Computational thinking, pedagogy of programming, and Bloom’s Taxonomy. In Proceedings of the Workshop in Primary and Secondary Computing Education, London, UK, 9–11 November 2015; pp. 80–87.
- Leighton, J.P. A cognitive model for the assessment of higher order thinking in students. In Assessment of Higher Order Thinking Skills; Information Age Pub.: Charlotte, NC, USA, 2011; pp. 151–181.
- Likert, R. A Technique for the Measurement of Attitudes; Archives of Psychology; The Science Press: New York, NY, USA, 1932; Volume 22.
This entry is offline, you can click here to edit this entry!