Aircraft four dimensional (4D, including longitude, latitude, altitude and time) trajectory prediction is a key technology for existing automation systems and the basis for future trajectory-based operations. The trajectory prediction is the process of estimating the future states of the aircraft based on the current aircraft state, estimation of the pilot and controller intent, expected environmental conditions, and computer models of aircraft performance and procedures.
1. Introduction
The Federal Aviation Administration (FAA)/Eurocontrol Action Plan 16 (AP16) defines trajectory as a four-dimensional (latitude, longitude, altitude, and time) description of an aircraft flight path [
5,
6]. The International Civil Aviation Organization (ICAO) extended the definition to the ground operation and expressed the trajectory as the description of aircraft motion in the air and on the ground, including position, time, speed, acceleration, and other attributes [
7].
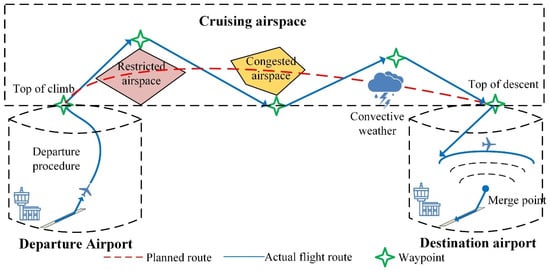
Due to airspace congestion, weather, temporary military activities, airspace restrictions, etc., the actual flight process of aircraft sometimes does not follow the route planned in advance, as shown in Figure 1. This reduces the predictability of air traffic, increases the difficulty of air traffic management, and seriously hinders the efficient operation of the air traffic management system. Therefore, it is necessary to predict the four-dimensional trajectory of the aircraft.
Figure 1. Schematic diagram of an aircraft in different stages of flight.
The trajectory prediction is the process of estimating the future states of the aircraft based on the current aircraft state, estimation of the pilot and controller intent, expected environmental conditions, and computer models of aircraft performance and procedures [
6]. According to whether the aircraft takes off, it can be divided into strategic prediction and tactical prediction. Strategic forecasting mainly predicts the possible future flight trajectories of the aircraft based on the aircraft’s flight plan, weather forecast information, aircraft performance, historical flight patterns, and other information. The tactical prediction adds more dynamic information, such as the aircraft’s own flight status information, airspace congestion, and so on.
In terms of the time scale, the trajectory prediction can be divided into two categories [
8,
9]: (1) Short-term prediction: short-term prediction in a few minutes or less. Since the forecast interval is small, there is no need to know long-term intentions and weather, but during the duration of the forecast interval, additional assumptions (such as fixed aircraft control and constant turn rate) are required. Since these assumptions are indeed valid in a smaller propagation interval, the prediction accuracy increases as the size of the prediction interval decreases. Short-term prediction allows the immediate risk of conflict to be detected, thus providing the possibility to resolve the real conflict. At the same time, a good TP can promote the generation of good alternative trajectories, compatible with existing constraints. (2) Medium- and long-term forecasts: long-term forecasts of ten minutes or more. Due to the large prediction interval, it is necessary to use information such as long-term intentions, environmental data, aircraft performance data, and navigation data. However, the uncertainty of this information will cause the prediction accuracy to decrease as the prediction time interval increases. Mid-to-long-term forecasting is helpful for effective planning and management and the regular assessment of airspace operation status and is mainly used for airspace flow assessment and the formulation of the flight plan of the aircraft operation center (or flight operation center).
According to the form of the prediction result, the trajectory prediction can be divided into two other categories [
10]: (1) Deterministic prediction: This is composed of the nominal method and the worst-case method and generally directly outputs the predicted four-dimensional trajectory information [
11]. The nominal method cannot perfectly describe the uncertainty of the aircraft’s future behavior. Therefore, as the forecasting time increases, its accuracy may decrease. The worst-case method usually assumes that an airplane will perform any one of a set of maneuvers and considers the worst-case aircraft trajectory prediction. This method is conservative. (2) Probabilistic prediction: This describes the potential changes of the aircraft’s future trajectory through modeling uncertainty, using the probability density function to describe the aircraft trajectory, which can provide more accurate long-term predictions than deterministic methods.
2. Trajectory Prediction Process
Trajectory prediction is usually performed by trajectory predictors (TPs). Because different DST and automation systems have very different requirements for TPs in terms of accuracy, uncertainty, response time, and input data, the structure, process, function, and performance of TPs depend entirely on the application of trajectory prediction [
12]. This will lead to the coexistence of multiple completely different TPs in the ATM system, which brings potential problems to the interoperability of different automation systems in the air and on the ground. For the purpose of ATM interoperability, AP16 proposed a general TP model [
5].
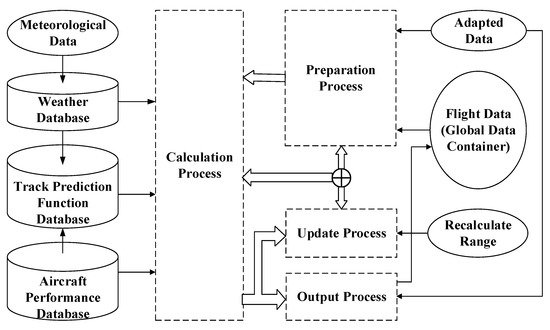
Figure 2 shows the general trajectory prediction process introduced in AP16, which includes four modules: preparation, prediction, update, and output. Here it is further broken down into the specific steps described in the FAA’s previous research management plan on general trajectory modeling [
5]. The input data of the preparation process include flight plans, airline operating procedures, air traffic control (ATC) restrictions on weather, and aircraft performance, etc. The process will integrate these data to establish a flight script (Flight Script, FS) to describe the predicted flight segment and construct a behavioral model. A behavior model is an ordered list of maneuvers that the aircraft plans to execute (also known as flight intent), describing how to operate the aircraft to meet trajectory constraints and user preferences in a clear way [
13]. The prediction process is the core process of TP. It uses a set of methods and algorithms implemented by the trajectory engine (TE) to obtain a calculated trajectory (CT) by combining behavior models, meteorological data, and aircraft performance data. The update process updates the flight script according to the constantly changing information, which can be performed through a regular update or monitoring of the consistency between the prediction and the true value, which may lead to the generation of a new flight script or the modification of information and trigger a new preparation process. The output process exports the output data of the TP to the client application, including the predicted trajectory and error and warning messages that notify the client of the availability and/or quality of the output data.
Figure 2. General TP process.
3. Prediction Methods
The state estimation model only establishes the motion equation based on the aircraft’s position, speed, acceleration, and other attributes, so as to realize the propagation of the estimate. The model is relatively simple, but because it cannot accurately capture the aircraft’s maneuvering uncertainty for a long time, it will cause large errors. Therefore, it can only work in a short time. Although flight intention information has been incorporated into the prediction model in order to improve the prediction accuracy, the inference of the intention is only relatively accurate in the short term.
Although the kinetic model is analyzed from the perspective of aircraft forces, in order to simplify the model, most of it is realized under some ideal assumptions, with little consideration of actual constraints and human behavior [
14,
15,
16,
17,
18,
19]; in addition, due to the consideration of aircraft performance, aircraft status, environmental conditions, and aircraft intentions, the model requires a large number of parameters, some of which are commercially sensitive and not easy to obtain, and the other part uses predefined settings or estimates in the existing database. Information is often not accurate enough. Thereby, the research that is being conducted by the projects PJ31 DIGITS and PJ38 ADSCENSIO in SESAR is committed to improving this situation. Meanwhile, the PCP Project on Initial Trajectory Sharing is also ongoing, and there is still a long way to go if they are promoted globally, so once the data resources are limited or not fully supported, the prediction accuracy of the model will be greatly reduced or even not applicable. The uncertainty of these input data sources will obviously bring greater uncertainty to the trajectory prediction. These errors include modeling errors, initial conditions errors, aircraft-specific errors, environmental information errors, and intention errors.
Machine learning models use machine learning and data mining algorithms to learn historical flight trajectories and meteorological data to predict flight trajectories. They are constructed under weak or even no assumptions. The machine learning model does not require explicit modeling of aircraft performance, procedures, and airspace, that is, it does not need to have a deep understanding of the relationship between the force and motion of the aircraft and only needs to learn the laws from massive data. Therefore, the machine learning model is actually a kind of data engineering in nature, and the larger the amount of data, the better the effect. Due to a large amount of flight trajectory data available, it makes it possible to mine complex trajectory patterns and extract important features, which provides data and a preliminary basis for trajectory prediction.
3.1. State Estimation Model
In practical applications, we can regard the operating process of a physical system as a state transition process. The trajectory prediction estimates the position, speed, and other states generated during the flight of the aircraft, and the state estimation model uses the state space theory to mathematically model the physical system. Any nonlinear system that can be described by a state-space model can use it to model the physical system. It is widely used in the field of target tracking and has become a class of methods for studying track prediction problems. The state estimation model needs to construct the state transition matrix in the state equation through the equation of motion and study the relationship between position, historical position, speed, acceleration, angle, and other states at each time point in the future. According to different assumptions about whether the aircraft has a single flight mode or multiple modes in the prediction process, this type of method is divided into single model estimation and multi-model estimation. Table 1 summarizes the various methods of the state estimation model.
Table 1. Overview of state estimation model methods.
| Single model estimation |
KF: [9,20,22] |
| Particle filter algorithm: [23] |
| HMM: [24,25,26,27] |
| Multi-model estimation |
Multi-model KF: [31,32,33] |
| IMM: [3,29,39] |
| Improved IMM: [35,36,37,38] |
3.2. Kinetic Model
The kinetic-based trajectory prediction model mainly studies the relationship between the force acting on the aircraft and the aircraft movement and also involves the force and movement of the aircraft. The dynamic model is expressed as a set of differential equations, given the current state of the aircraft (such as mass, thrust, drag, position, speed, angle of inclination), meteorological conditions (such as wind speed and direction), and aircraft intentions (such as target speed or climb rate), through the integral–differential equation in a time interval to predict the continuous points of the future aircraft trajectory [40]. Therefore, this method integrates aircraft intent, performance parameters, and meteorological environment data for calculation.
2.3. Machine Learning Model
Except for some irregularities, each execution of the flight in the historical data usually follows the same planned route and flies over the same waypoint sequence, which proves that the historical trajectories have certain regularity, providing the feasibility for using machine learning to solve the problem of track prediction [
27]. This type of method mines the law of aircraft trajectory changes over time from a large amount of data and uses the law to predict the position trajectory. On the one hand, it mainly relies on the underlying laws of aircraft operation and excavates representative trajectory patterns. On the other hand, it is based on the reconstruction of input and output space [
12]. It is divided into regression models, neural networks, and other methods.
Table 2 summarizes the methods commonly used by scholars in the past when using machine learning models.
Table 2. Overview of machine learning model methods.
| Regression model |
Linear regression: [41,59,60]
Stepwise regression: [57] |
| Nonlinear regression: [41,58] |
| Neural network model |
Feedforward neural networks: [61,70,75,84]
Elman neural network: [78]
LSTM: [62,63,64,65,67,71,72]
DNN + LSTM: [40]
CNN + LSTM: [66]
GRU: [79]
Bayesian neural network: [40,69] |
| Generative adversarial network: [68] |
| Other methods |
A gaussian mixture model with clustering: [82] |
Random forest with clustering: [83]
Neural Networks with clustering: [8]
Nonparametric interval prediction: [73]
Genetic programming: [76] |
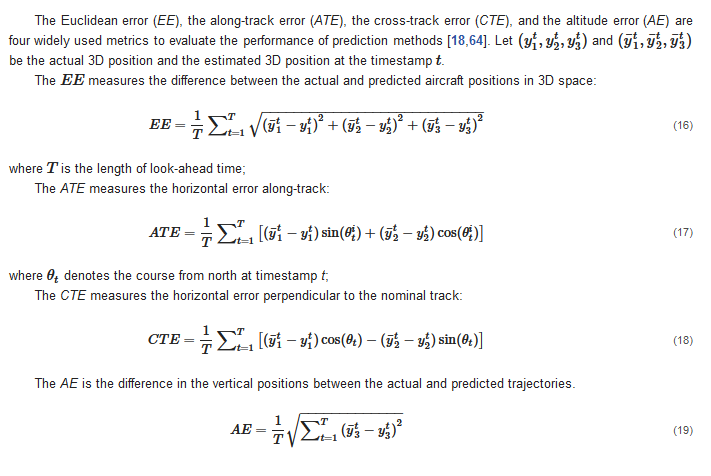
4. Evaluation Index
5. Open Database
6.1. Aircraft Performance Data
Aircraft performance data include the flight envelope (maximum speed, minimum speed, etc.) of each aircraft model, aerodynamics (wing area and drag coefficient), engine thrust and fuel consumption, and other parameters [
44]. Currently, available performance databases mainly include the Base of Aircraft Data (BADA), Aircraft Noise and Performance (ANP), etc., of the European Control Center.
6.2. Aircraft Surveillance Data
The monitoring data include the current position and speed of the aircraft and provide the real-time status of the aircraft. These data are mainly used to monitor and update the trajectory, such as automatic dependent surveillance broad (ADS-B) data and secondary radar surveillance data.
6.3. Meteorological Data
Meteorological data provide information related to environmental conditions, such as temperature, wind direction and speed, air pressure, and changes in gravity and magnetic force. Currently, commonly used weather databases include EUROCONTROL for Medium-Range Weather Forecasts (ECMWF), North American Mesoscale Forecast System (NAM), and so on. When environmental information is not available, estimated values are sometimes used instead.
6. Challenges and Future Research
- (1)
-
The performance of the trajectory prediction model is closely related to the accuracy of information such as aircraft performance parameters, aircraft intent, and meteorological conditions. These input parameters are more or less in error, and small errors in some parameters can lead to catastrophic prediction results. In order to make more accurate predictions, it is possible to strengthen the real-time sharing and transmission of data such as uncertainty, which is a hotspot of current research; in addition, a more robust prediction model can be established through a method research, which is the focus of future research.
- (2)
-
In recent years, ensemble learning is a type of machine learning method that uses multiple models or learners for modeling and uses certain rules to integrate the learning results, so as to obtain a machine learning method that is better than a single model or learner. The existing prediction models have their own advantages and disadvantages, and the application scenarios are different. Therefore, integrating different models to build a track prediction fusion model will improve the accuracy and stability of the model.
- (3)
-
In general, air traffic congestion on an aircraft’s planned route affects the flight path. At the same time, aircraft passing through the same route or waypoint will also affect each other. How to fully consider the overall traffic congestion and the interaction between aircraft when building a prediction model will help improve the accuracy of track prediction.
- (4)
-
Probabilistic trajectory prediction is often more practical than deterministic trajectory prediction. The performance of many air traffic intelligent decision-making systems depends on the accuracy of trajectory prediction. However, trajectory prediction is often affected by a variety of factors, resulting in errors in the prediction results of deterministic models. Therefore, in some application scenarios, it is often more reasonable to predict the spatiotemporal distribution of the track.
- (5)
-
Most of the research and development of decision support tools are mainly focused on the terminal airspace. The effective operation of these automated decision support systems depends on the results of aircraft trajectory prediction with high reliability and accuracy. However, the complex structure of the airport terminal airspace, the high density of flight flow, and the frequent changes of aircraft flight attitudes bring challenges to the high-precision and reliable prediction of flight paths.
This entry is adapted from the peer-reviewed paper 10.3390/aerospace9020091