Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
Subjects:
Engineering, Electrical & Electronic
Biomechanics are at the heart of the biomimetic embodiment of a hexapod robot because legs are constrained by mechanical stress when they are in contact with the ground, and they have to follow various locomotion patterns dictated by the locomotion control system. Mechanical strength and execution fidelity of the pattern of locomotion by adding force sensing to joints are the two key parameters in biomechanics.
- hexapod
- legged robotics
- biomimcry
- biomimetism
- bionics
- biorobotics
1. Robotic Leg Design
1.1. Design and Morphology
The design of an insect-like hexapod robot is, in itself, a complex task, requiring compromises and the establishment of a balance between desired performance and true feasibility limited by technical progress. Two main aspects define a hexapod robot leg: the number of degrees of freedom (DOF) and the structure type. Each of these aspects are selected and designed for the uses to which the robot will be put.
Number of degrees of freedom (DOF): determines the operating space of the robot. By increasing of DOFs, the robot can achieve more complex trajectories. The number of DOFs also has a direct impact on robot characteristics, such as its autonomy, mass, and cost. Therefore, the number of DOFs should not be neglected in the design process. Currently, insect-inspired robotic legs are designed with between one and five DOFs per leg.
With one DOF per leg, the robot’s maneuverability is highly limited. Depending on both leg and control designs, a one DOF per leg robot can perform a straight line walk [55] and also achieve simple rough terrain navigation if is equipped with whegs [46,56,57], comprising elements of both wheels and legs. These whegs equipped robots cannot really be considered as insect-like robots regarding their body structure. Their development tends to target navigation tasks over locomotion studies.
With two DOFs per leg, a simplified hexapod robot can be built [58]. This choice is a good compromise between energetic cost and mobility. However, this type of robot walks mainly over flat terrains and can only perform curved leg trajectories, generating body oscillations.
Previously, insect-based hexapod robots were built with three DOFs per leg (Table 1, in which the trochanter segment joint is merged with the femur and each joint only comprises one DOF, see Figure 1). Reflecting the standard insect leg model [59], this type of leg permits roaming in a slightly rough or slopped terrain in addition to a flat terrain walk.
Table 1. Overview of the state-of-the-art hexapod robots developed over the last 20 years in the range 1∼27 kg. The size, given in meters, corresponds to the largest dimension between width and height. DOF stands for Degrees Of Freedom for the entire robot (note that this can include extra actuation for head control and body control). The speed represents the maximum speed measured, in meters per second. The symbol “-” represents missing data.
| Year | Ref. | Hexapod | Size [m] | Mass [kg] | DOF | Compliant | Speed [m/s] | Task |
|---|---|---|---|---|---|---|---|---|
| 2021 | [14] | HAntR | 0.50 | 2.9 | 24 |  |
0.43 | Locomotion |
| 2019 | [15,16] | MORF | 0.60 | 4.2 | 18 |  |
0.70 | Locomotion |
| 2019 | [17] | Daisy | 1.10 | 21 | 18 | |
0.13 | Locomotion |
| 2019 | [18,19] | Drosophibot | 0.80 | 1 | 18 | |
0.05 | Locomotion |
| 2019 | [3,20] | AntBot | 0.45 | 2.3 | 18 | |
0.90 | Navigation |
| 2019 | [21] | Corin | 0.6 | 4.2 | 18 | |
0.10 | Locomotion |
| 2018 | [22] | AmphiHex-II | 0.51 | 14 | 6 | |
0.36 | Locomotion |
| 2018 | [23] | CRABOT | 0.70 | 2.5 | 24 | |
0.05 | Locomotion |
| 2017 | [24,25] | PhantomX AX | 0.50 | 2.6 | 18 | |
0.29 | Locomotion |
| 2017 | [20,24] | Hexabot | 0.36 | 0.68 | 18 | |
0.35 | Navigation |
| 2016 | [26] | Weaver | 0.35 | 7 | 30 | |
0.16 | Locomotion |
| 2016 | [27] | MX Phoenix | 0.80 | 4.8 | 18 | |
0.50 | Locomotion |
| 2015 | [28] | Phoenix 3DOF | 0.37 | 1.3 | 18 | |
0.25 | Locomotion |
| 2015 | [29] | HexaBull-1 | 0.53 | 3.4 | 18 | |
- | Locomotion |
| 2015 | [30,31] | MantisBot | 0.74 | 6.1 | 28 | |
- | Navigation |
| 2015 | [32] | Snake Monster | 0.70 | 4.6 | 18 | |
- | Locomotion |
| 2015 | [33] | BionicANT | 0.15 | 0.105 | 18 | |
- | Swarming |
| 2014 | [34,35,36] | HECTOR | 0.95 | 13 | 18 | |
- | Navigation |
| 2014 | [37,38] | Messor II | 0.30 | 2.5 | 18 | |
0.09 | Locomotion |
| 2014 | [39,40] | LAURON V | 0.90 | 42 | 24 | |
- | Navigation |
| 2014 | [41] | CREX | 1 | 27 | 24 | |
0.17 | Locomotion |
| 2012 | [42] | Octavio | 1 | 10.8 | 18 | |
- | Locomotion |
| 2011 | [43] | - | 0.46 | 3 | 18 | |
0.03 | Navigation |
| 2011 | [44,45] | EduBot | 0.36 | 3.3 | 6 | |
2.50 | Locomotion |
| 2010 | [46] | X-RHex | 0.57 | 9.5 | 6 | |
1.54 | Locomotion |
| 2008 | [47] | DLR-crawler | 0.50 | 3.5 | 18 | |
0.20 | Locomotion |
| 2006 | [48,49] | AMOS-WD06 | 0.40 | 4.2 | 19 | |
0.07 | Locomotion |
| 2006 | [50,51] | Gregor I | 0.30 | 1.2 | 12 | |
0.03 | Locomotion |
| 2005 | [52,53] | BILL-Ant-a | 0.33 | 2.3 | 18 | |
0.03 | Locomotion |
| 2001 | [54] | RHex | 0.54 | 7 | 6 | |
0.55 | Locomotion |
To sum up, from the large number of robots based on three-DOF legs, this appears to be the right compromise to walk on a flat terrain. Despite the three DOFs per leg trend, from a biological point of view, an insect possesses more than three joints with one DOF per joint [62,63], allowing it to overcome large obstacles and cross sloped and rough terrain (e.g., up to 54∘ see [64]). More complex models based more closely on insect leg kinematics are being developed [65]. Dung beetle like legs were built in 2018, the leg design was based on micro-CT scans of a real dung beetle [66]. A pair of beetle-like legs comprising four DOFs, allowing both manipulation and transportation was tested [66].
In 2017, a hexapod robot, called Cassino Hexapod III (∼3 kg), composed of hybrid legs on a modular anthropomorphic architecture with omni-wheels, as feet at the extremities, was designed and built [67]. Each hybrid leg was built with three DOFs with the third being dedicated to rotating the wheel at the tip of the leg. This kind of hybrid locomotion is relevant for efficient rolling mobility on moderate terrain and walking mobility on extreme terrain, such as non-terrestrial exploration [68]. Hybrid locomotion by walking or by rolling allows hexapod robots to save energy, and this hybrid locomotion is a combination of an engineering approach and a bio-inspired approach. Hybrid locomotion has not been developed in this review, which is focused on the biomimetic approach.
Structure type: this describes how leg joints are linked to each other. Two major leg designs are used on inspect-inspired robots: serial multi-shaped legs or single shape legs.
Serial multi-shaped legs are the most common structures encountered for locomotion and navigation. By definition, an insect leg is composed of five segments (coxa, trochanter, femur, tibia, and tarsus), arranged in a particular toggled zig-zag shape, forming a sprawled posture, reducing and distributing the forces on every joint of the leg [69,70]. However, in most robotic cases, this structure is simplified to three segments per leg (coxa, femur, tibia) comprising three joints per leg, each one with only one DOF (see previous point). In this arrangement, the trochanter segment of the leg is merged with the femur, and the tarsus is generally removed. However, the tarsus makes an important contribution to the insect’s walk, serving as an adhesive pad [62,71] and allowing a better ground forces transmission with a passive spring effect. Moreover, some insects (e.g., leafhoppers) possess particular tarsal structures allowing them to jump from smooth surfaces [72]. Looking over the last decade of hexapod robots, presented in Table 1, the tarsus is often neglected, even though it represents more than 30% of the leg length [73]. Currently, few artificial tarsus designs have been developed to efficiently walk on complex terrains [74].
Single shape legs are used on whegs robots, origami, and compliant joint robots. The specifications of these types of robots, require the absence of most tiny mechanical parts such as bearings, shafts, screws, and nuts, and involves a simplicity of manufacturing, scale and cost reduction and, backlash and structural robustness improvements. The development of single shape legs follows the advances in new materials and manufacturing techniques such as multi-material 3D printing, which allows the building of soft joint robots [75]. Particularly, the 3D printing of legs appears to be a good way to develop and simplify standard joint designs by using properties of these new materials, such as flexibility or heat deformation [76]. In this way, hexapod robot legs are tending to become closer to real insect legs, in terms of relative dimensions and mass. An important point to notice for insects, e.g., cockroaches, is that a leg corresponds to approximately 2% of the body mass [77], allowing them low inertia, high frequency strides during a walk. In comparison, insect-like robot legs represent at least 10% of the overall mass (estimated for a 2 kg robot, from Table 1). Apart from 3D printing, some materials could take over from standard aluminum or molded plastic legs, e.g., chitosan–fibroin material, inspired by insect cuticle structure [78].
Furthermore, some other original structures have been designed; they were mainly developed when a specific animal behavior, such as jumping [79,80], is to be replicated or to satisfy some sought after design specifications like posture changes [81].
At first glance, leg design is highly dependent on actuator technologies. However, an impressive number of improvements are still possible through subtle structural modifications, allowing huge performance improvements. Independently of the structure type, observing the current state of the art in leg design, a question presents itself: why are all the legs of a hexapod robots the same? Insect legs are different in size (Figure 2, see [82]), and not built like robot legs, wherein the six are often identical, except for a few robots mimicking insect morphology in detail (Drosophibot [18,19] and MantisBot [30,31]). In response to this question and with the technologies now available, in the 2020s, leg design is likely to become increasingly based on available micro-CT scans of real insects (e.g., [66,83] dung beetles, [84] flies, or [65] ants) in order to improve the level of complexity, fidelity, and bio-inspiration.
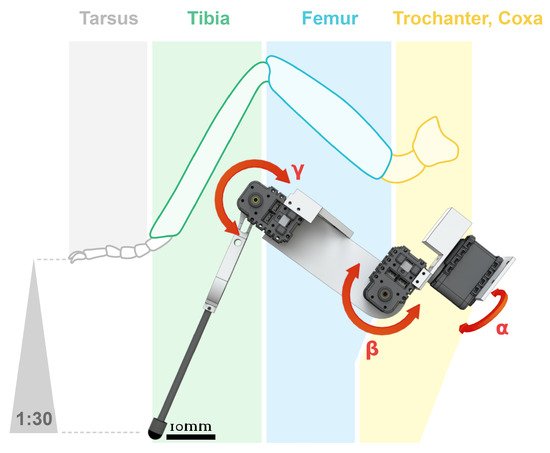
Figure 1. A standard hexapod robot 3-DOF leg, based the Cataglyphis fortis ant scale 1:30. Angle α corresponds to the thorax-coxa joint position, angle β corresponds to coxa-femur joint (up to now, robotic designs have often fused the trochanter-femur joint), and angle γ represents femur-tibia position. Illustration: ©Camille Dégardin & Ilya Brodoline (2021).
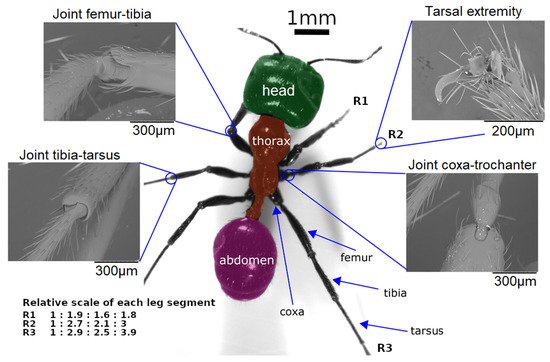
Figure 2. Scale, segments, and joints in ant Messor barbarus. Photographic credits: Hugo Merienne, Centre de Recherches sur la Cognition Animale (CRCA UMR 5169), Toulouse, France. The relative scale of each segment (coxa, femur, tibia, tarsus) w.r.t. the coxa leg of each leg (R1, R2, R3) comes from [73]. Adapted from [82] under CC-BY License, 2019.
Table 2. Level of performance in terms of cost of transport (CoT) in hexapod robots walking in tripod locomotion over a flat terrain. The speed is the maximum speed.
| Robot | Actuators | #Actuators | Mass (kg) | Speed (m/s) | CoT |
|---|---|---|---|---|---|
| Daisy | X-series | 18 | 21 | 0.13 | 3.7 |
| X8-9 and X8-16 | |||||
| HAntR | Dynamixel AX-12A | 24 | 2.9 | 0.43 | 1.5 |
| AntBot | Dynamixel AX-18A | 18 | 2.3 | 0.90 | 6.2 |
| CRABOT | Dynamixel AX-18A | 24 | 2.5 | 0.05 | - |
| Hexabot | Dynamixel XL-320 | 18 | 0.93 | 0.35 | - |
| Weaver | Dynamixel | 30 | 7 | 0.16 | 1.5–1.8 |
| MX-64 and MX-106 | |||||
| EduBot | DC motor | 6 | 3.3 | 2.5 | 0.5–1.6 |
| Messor II | Dynamical RX-28 | 18 | 2.5 | 0.09 | - |
| BionicANT | Trimorphic piezo-ceramic | 18 | 0.105 | - | - |
1.2. Cost of Transport
To compare the level of performance between robotic designs, the cost of transport (CoT) is now a common adimensional metric (Equation (1)) used to evaluate any legged robots [14,85,86,87].
where P is the mean power consumption, m is the robot weight, v is the mean speed, and g is the gravitational acceleration (g = 9.81 m·s−2). The CoT depends linearly on the weight in log-log space with a negative slope [88,89,90] for both animals and robots. In the animal kingdom, biologists evaluate the efficiency locomotion with the mass-specific energy per unit distance (in J/(m·kg)), which can be defined by the gravitational acceleration-CoT product. With such an approach, we can estimate the ant’s CoT ∼39, and also the CoT of a 2–3 kg animal as close to ∼2. The current CoTs of hexapod robots weighting 2–3 kg is similar those of animals (Table 2). As a result, we can conclude that the locomotion efficiency of hexapod robots is currently no better than that of animals.
CoT=P/(m⋅g⋅v) (1)
The CoT of hexapod robots is lower in tripod locomotion on a flat terrain [14]. A tetrapod or pentapod locomotion deteriorates the CoT value, likewise a sloping or rough terrain. As a result, to compare hexapod platforms, they must be evaluated using the same task and environmental conditions, here in tripod locomotion on a flat terrain and in a room with the air temperature set at 25 °C (Table 2).
1.3. Actuation of the Legs
Many actuator technologies can be used to control the joints between the leg segments: servomotors, brushless motors, or artificial muscles, which are under developments in laboratories.
-
Servomotors: the main issues with servomotors are their weight and energy efficiency. A servomotor heats up easily until it surpasses its maximum operating temperature of 70 °C, then it stops working. In addition, a servomotor is composed by definition, of a motor with high ratio gearing used to make it as stiff as possible. In this sense, such servo-based actuators differ significantly from biological actuators that may have variable stiffness and adaptable compliance. One way to implement variable stiffness is to use springs to make variable impedance actuators (VIA). As summarized in [91], VIA actuators can be classified into three categories: spring pre-loaded variation, transmission ratio changing and spring physical property alteration. VIA is certainly an approach of great interest for the design of future hexapod robots able to dynamically change the stiffness of their joints.
-
Brushless motors: recent developments in smart rotating actuators based on brushless motors will permit the design of direct drive joints without gearing. The maximum specific power of electric motors with permanent magnets is 300 W/kg, which is about the same order as biological muscle [92]. Companies, such as HEBI Robotics [17] or IQ Motion, have developed integrated rotating actuators for robotic applications and for the development of mobile robots of various sizes. As the electronic driver and angular sensor are integrated into the motor, it drastically simplifies the wiring and complexity of the overall hardware architecture, which can be crucial when designing robots like hexapods that require the control of 18 actuators.
-
Artificial muscles: the design of future insect-inspired robots will certainly depend on the availability of actuators able to mimic the functionalities of biological muscles. Their properties of viscoelasticity and energy dissipation leading to high compliance is the holy grail of insect-inspired actuators. Among the broad repertoire of new artificial actuators for robots (see review by [93]), non-conventional actuators like pneumatic artificial muscles (PAMs), shape memory alloys (SMAs), and electroactive polymers (EAPs) are of great interest. One particular case is HASEL actuators, which are composed of a series of pouches made of a flexible and inextensible shell that is filled with a liquid dielectric. Electrodes cover a portion of each pouch so as to progressively close when a voltage is applied thus squeezing the pouches to increase their volume [94]. HASEL actuators can be implemented in different ways and can feature a bandwidth as high as 126 Hz for the quadrant-donut HASEL and even a specific energy twice as high as mammalian skeletal muscles for the planar HASEL actuator [94]. HASEL actuators mimic the muscle-like performance of dielectric actuators (DEAs), which can be highly effective for robotic applications. They can lift more than 200 times their weight and have a peak specific power of 585 W/kg [95]. Moreover, it is worth noting that a toolkit has been developed to aid designs using HASEL actuators [96]. In addition, electro-ribbon technology, with an ability of lifting 1000 times its own weight and a contraction by 99.8% of its length, is also very promising [97]. Finally, five-DOF soft dielectric elastomer actuators have been shown to be very useful in the implementation of soft legged robots [98] which are able to walk with an alternative tripod gait as fast as 52 mm/s for a 7 Hz actuation frequency.
1.4. Force Sensing in Robotic Legs
An overview of the state-of-the-art in force sensing for multi-legged walking robots is available in this study [99], but where is the right location in a leg for sensing a mechanical action: is it at the tip of the leg, within the leg structure, or directly in the joints?
-
Leg tip/TARSE sensing: sensing at the end of the leg can be done by a tactile sensor, a pressure sensor, a three-axis force/torque sensor [100], or a compliant force sensor made with a spring [15,39]. Leg tip sensing can be easily implemented by adding an attachment point to the leg tip without requiring any modification of the robot’s structure. The cost of these tip sensors can be expensive depending on the chosen technology, but recent research has developed low-cost designs [100]. Tip force sensing is useful because it provides the robot with a terrain description. Force measurements allow the robot to understand which of its legs are in contact with the ground, or to evaluate the terrain slope, in order to both adjust its gait and plan its path [101].
-
Force sensing in actuators: sensing coming from the state of actuators by current measurement [26,29,37,43] or dedicated sensors in the joints. This category of sensors simplifies the robot’s design, since the sensor is integrated within the actuator forming a compact structure. The complexity of the estimation of forces from the currents generated by the actuators is based on the robot’s leg model. To obtain an accurate leg movement, the mathematical model should reflect the robot as closely as possible, and take account of any structural deformation under various loads since no material is perfectly rigid.
-
Legs with compliant structures: compliant mechanisms exploit the deformation properties of the leg segments, deformations that could be a disadvantage in other legs. Stiffer legs appear to narrow the region of stable gaits while preventing tripod contact with the ground. However, compliant legs are more capable of absorbing energy even if the leg touches down early, thus minimizing the severity of ground reaction on legs. This solution had been developed for one-joint C-shaped legs [44,45,54]. Whegs do not possess any force sensors on their legs. Compliant legs offer the possibility of placing the force sensors along the segments (such as the femur or the tibia) [101,102]. This type of sensor placement mimics the force measurements in insects, as done by campaniform sensilla mechanoreceptors [103,104].
Currently, three distinct groups of sensors exist and are implemented on board hexapod robots. A force sensing in actuators may be chosen if no structural modification is allowed. Alternatively, with a slight modification of the tarse, leg tip sensors provide the required information for achieving accurate locomotion control over rough terrains. Lastly, compliant legs permit the implementation of force sensing although this will increase the complexity of the design.
2. From Legs to Robots
2.1. Body Morphology
Although hexapod robot leg morphology seems to be a similar, albeit simplified, representation of insect morphology, the overall body structure of most of the common robots is far from that of animals. Firstly, few robot designs feature a multi-segment thorax. While this is present in robots such as HECTOR [34,35,36] or MantisBot [30,31], the benefit of this type of design has still not been demonstrated. This only appears to help during tight turns or high obstacle climbing [105]. Thus, the increase in weight and energy consumption of this type of design, due to additional joints and body parts, justifies the more general choice of single shape body morphology. The second point is another aspect of body geometry. Various geometries are used in hexapod robot developments: circular, hexagonal, rectangular, etc. The main difference between these geometries is the necessity of performing a specific turning gait for the rectangular shape, whereas circular or hexagonal bodies allow, through their symmetry, an omnidirectional walk (see the review [13] for more details).
2.2. Scale Effect on Level of Performance
Insect-like robot design process aims to validate biological hypotheses in navigation or locomotion, or to mimic behaviors and sensory systems (as shown in Table 1).The scale should then be taken into account throughout the development process as this will affect kinematic changes in robot locomotion and mechanics material [106]. Therefore, the question of the scale’s influence is raised. How will the scale affect the performance level? If a behavior is present in a small insect, is it possible to reproduce it at a given scale of robot? To answer these questions, it is necessary to discuss the kinematic changes in robot locomotion taking account of material mechanics and energetic aspects.
From the point of view of the material, the larger the robot is, the larger are going to be the internal deformations of its segments. To compensate for deformations, larger beams have to be used, so the weight of the leg segments and of the thorax are increased. Moreover, the scale factor of the robot proportionally affects the step size. However, not all kinematic parameters vary linearly with scale. From mechanical equations, some scale factors have been set [107,108], giving a scaling effect on essential physical values like mass, frequency, stiffness, damping, velocity, and power. Thus, a small size robot with a scale close to that of an insect can possess a light structure, fine legs, and walk at a high frequency. Conversely, for a large scale robot, higher mass and a slower frequency walk, due to inertia increase, are going to be observed. Higher actuator power will also be required, to set the robot in motion, and this implies a manufacturing price increase.
As a brief conclusion, the development of large scale hexapod robots is not justified. The advantages of working with a high scaling factor are their improvements in energetic values and technological limits (see Table 2). Regarding power consumption, represented by the CoT (see Section 2.1.2), the relationship between different scales of the same robot morphology has not yet been precisely fixed [89,108]. Basically, the global trend shows that, the more massive the hexapod, the lower its CoT; thus, it has a better walk efficiency. However, and by definition, the CoT does not take account of animal scale and its interaction with environment. The high CoT in insects must be considered in terms of their lifestyle, they do not need to save more energy when traveling. Accordingly, a robot’s size should be selected according to the type of mission (environment relief, distance to travel, payload, etc.), then corresponding to a given CoT value, roboticists should be able to compute the ideal robot mass.
Moreover, there are difficulties in manufacturing reduced scale robots. For instance, common methods of 3D printing have an average deviation error of 0.4 ± 0.2 mm [109], which limits the size of printed mechanics. Batteries also have technological limits. Commonly used lithium batteries have a low energy density (around 150 Wh/kg) [110]. Moreover, battery cells have a high mass, difficult for a light robot. In the near future, the development of new bio-inspired power sources should bridge this energetic gap, with a higher energy density (298 Wh/kg [110]), and this would allow more compact robot designs [111].
3. Hexapod Robot Accessibility Criteria for Academics
Over the past 10 years, many new designs have been proposed to the general public. These hexapod robots are generally available in do-it-yourself kit form, thus promoting opportunities for customization such as modifications in actuation and the addition of sensors to enhance the robots’ locomotion skills. For instance, the small inexpensive hexapod robot Hexy, produced by ArcBotics, features 18 DOFs achieved by means of Fitec servomotors (0.12 s per 60∘), and is mainly intended for educational applications (Figure 3a). A leader in the market of robot kits for the general public, Lynxmotion™offers a wide range of relatively small designs, such as the Phoenix, which features 18 DOFs (Hitec HS-645 servomotors) with a maximum speed of 25 cm/s (Figure 3b), or T-Hex for which the 24 DOFs allow more complex motion (Figure 3d). Recently, EZ-Robot released Six, a fully 3D-printed hexapod robot endowed with 12 DOFs (Figure 3e). As with Hexy, this robot was released with educational purposes in mind, allowing students to tackle complex tasks such as visual-based object tracking and artificial intelligence with machine learning applied to gait generation. The 18-DOF PhantomX AX Metal Mark III hexapod robot (Figure 3c), developed by Interbotix Labs., offers promising dynamic performance with a maximum speed measured at 80 cm/s. Generally, these robots could be considered as inexpensive, with prices ranging from 250 to 3000 US dollars, but others require a significant budget, such as the Daisy Hexapod Robot Kit from HEBI Robotics [17], available from 83k US dollars (Figure 4f). The variations in price are almost exclusively the result of the quality and number of servomotors used in their design. On average, hexapod robots equipped with servos using only plastic gears are cheaper, but have a significantly reduced lifespan compared to their metal counterparts. Although standard servomotors are not optimized for such applications, they offer a quick solution for benchmarking new designs of hexapod robots in academia. Open-source projects by private individuals have also been reported. For instance, the MX Phoenix hexapod robot [27] and the MorpHex double hexapod robot were developed by Kare Halvorsen, who was inspired by robotic projects from Jim Frye (founder of Lynxmotion) and from Matt Dentons (Mantis project manager and founder of Micro Magic Systems). MorpHex’s unusual design features two hexapod robots connected in a top to tail fashion. Their legs are covered with spherical parts in such a way that when the robot refolds, it forms a perfect sphere. This mechatronic design allows MorpHex to either crawl or roll on almost any kind of terrain.
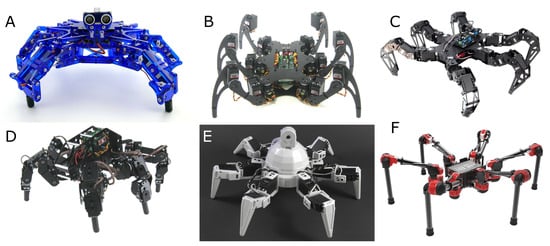
Figure 3. Open-source hexapod robots and educational robots available in kit form. (A) Hexy (Credits: ArcBotics). (B) Phoenix (Credits: Lynxmotion). (C) PhantomX (Credits: Interbotix Lab., Trossen Robotics). (D) T-Hex (Credits: Lynxmotion). (E) Six (Credits: EZ-Robot). (F) HEBI Robotics’ 18-DoF Daisy Hexapod, built using HEBI’s X-Series actuation hardware (Credits: ©HEBI Robotics 2021).
The aforementioned robots represent a unique set of opportunities for academia in both research and education since they are relatively inexpensive and easy to obtain, either in kit form or by replication based on open-source models. Fast customization for adaptation to the experimental context is another important feature of these new products. This recent trade has been intensified with the emergence of online sharing platforms such as GitHub, Thingiverse, and Instructables. A wide range of open-source projects can be found on these very popular platforms, supported by an extensive international community of robotics designers, engineers, and researchers. The recent democratization of 3D printing is also greatly contributing to the rise in open-source projects. Lastly, the development of a unique framework for robot programming, i.e., Robot Operating System (ROS), ensures the standardization of software developments, such as locomotion firmware for hexapod gait generation.
4. Conclusions
Over the last ten years, the booming use of 3D printing has significantly boosted the development of brand new mechatronic designs for hexapod robots. So, what can we expect from the next 10 years in hexapod robot design?
New emerging printable materials combined with multi-material 3D printers will make it easy to design and to reproduce insect-based legs by using micro-CT scans of real insects in order to reach their level of complexity. This will, not only lead to a better understanding of how insects walk, but also to finding innovative leg structures incorporating smart force sensing by adding soft materials. Force sensing is a critical aspect in locomotion control for complex terrain prediction and adaptation, adding both compliance segments and actuators to the leg structure at strategic locations is the major issue for the next decade. In insects, force measurement is done at the level of the campaniform sensilla on their exoskeleton close to their joints, and not at the tip of their leg. Such an approach in force sensing could significantly improve the level of compactness of future hexapod robots. By means of such bio-inspired approaches to insect morphology coupled with 3D printing, leg structure based on exoskeleton design will be easy to prototype, to clone for academics, and to repair. Such a bio-inspired exoskeleton could permit a significant reduction in the legs’ weight, and therefore enhance the capacity of load transportation in hexapod robots.
This entry is offline, you can click here to edit this entry!