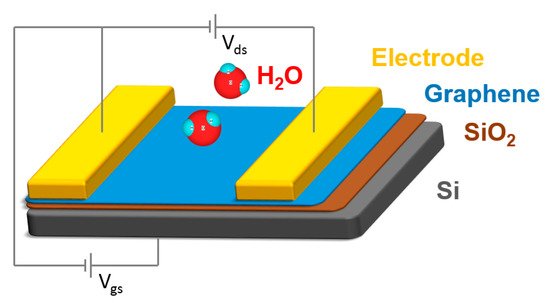
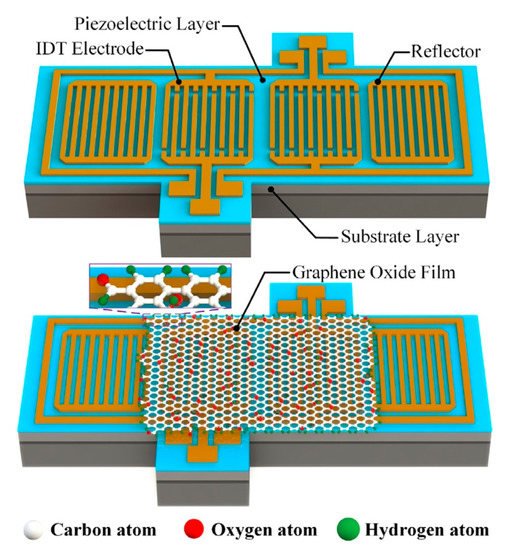
Principally, SAW humidity sensors are a type of microelectromechanical system, which detect the humidity change depending on the modulation of surface acoustic waves. An SAW sensor basically comprises a piezoelectric substrate, an input interdigitated transducer (IDT) on one side, a second output IDT on the other side of the substrate, and a delay line in the space between the two IDTs (
Figure 4) [
78,
79]. The input IDT produces a mechanical SAW under the sinusoidal electrical signal using the piezoelectric effect of the piezoelectric substrate, and the SAW propagates across the decay line, where the SAW is influenced by the environment. The SAW is converted into an electric signal by the piezoelectric effect in the output IDT, and any changes made to the mechanical wave are reflected in the output electric signal. The sensing can be accomplished by measuring changes in the amplitude, phase, frequency, or time-delay between the input and output electrical signals. Any changes of the physical or chemical properties of the sensor surface, such as the mass, conductance, or viscoelasticity, affect the acoustic wave velocity or attenuation [
80]. Graphene-based SAW humidity sensors generally employ graphene materials as the acoustic layer and utilize the mass change induced SAW change to detect the humidity because hydrophilic GO or GO-based composites enhance the water adsorption capability through the oxygen-rich groups, strengthening the mass loading effect. Based on the above mechanism, SAW sensors towards other gases or targets can also be designed by modulating the properties of the sensing materials and their interaction with sensing targets.
Balashov et al. investigated the sensing performance of SAW humidity sensors by coating a submicro-thick film of GO or a polyvinyl alcohol (PVA) thin film on the decay line, and the GO-based humidity sensor showed a sensitivity of 1.54 kHz/% RH (relative humidity), much higher than the 0.47 kHz/% RH and 0.13 kHz/% RH for the PVA coated and uncoated one, respectively [
78]. The SAW humidity sensor prepared on the LiNbO
3 surface coated with a CVD-growth graphene layer showed a frequency downshift of 1.38 kHz/% RH in the RH range lower than 50% due to the mass loading and a frequency downshift of 2.6 kHz/% RH in the RH range higher than 50% due to the change in the elastic properties of graphene film [
81]. The SAW humidity sensor based on GO coated LiNbO
3 plate showed a super high sensitivity by employing a high-order lamb wave with a large coupling constant, standard LiNbO
3 plate, and graphene oxide sorbent film, showing a minimal detectable level as low 0.03% RH, and reproducibility of ±2.5% [
82]. Xuan et al. demonstrated SAW humidity sensors based on a ZnO piezoelectric thin film on a glass substrate with GO as the sensing layer, which exhibited a high sensitivity from 0.5% RH to the 85% RH range with very fast responses (rise time of 1 s and fall time of 19 s) [
83]. Then, they realized a high-performance flexible SAW humidity sensor with the same GO sensing layer on a piezoelectric ZnO thin film deposited on a flexible polyimide substrate [
84]. Similarly, Kuznetsova et al. reported an SAW humidity sensor based on a GO film/ZnO film/Si substrate with an enhanced sensitivity of about 91 kHz/% RH and a linear response towards relative humidity in the range of 20–98% [
85]. Recently, Xie’s group proposed an SAW humidity sensor based on an AlN/Si (doped) layered structure with a GO sensing layer for a high sensitivity and low temperature coefficient of frequency [
79]. The humidity sensor coated with the GO layer exhibited an improved sensitivity of up to 42.08 kHz/% RH in the RH higher than 80% and worked well at both low (<10% RH) and high (>90% RH) humidity. Moreover, it showed low hysteresis, outstanding short-term repeatability, long-term stability, and improved thermal stability.