Development of Autonomous Underwater Vehicles (AUV's) has permitted the automatization of many tasks originally achieved with manned vehicles in underwater environments. Teams of AUV's designed to work within a common mission are opening the possibilities for new and more complex applications. In underwater environments, communication, localization, and navigation of AUV's are considered challenges due to the impossibility of relying on radio communications and global positioning systems. For a long time, acoustic systems have been the main approach for solving these challenges. However, they present their own shortcomings, which are more relevant for AUV's teams. As a result, researchers have explored different alternatives. To summarize and analyze these alternatives, a review of the literature is presented in this paper. Finally, a summary of collaborative AUV's teams and missions is also included, with the aim of analyzing their applicability, advantages, and limitations.
- Autonomous Underwater Vehicle(s)
- Collaborative AUV’s
- underwater localization
1. Introduction
Over the years a large number of AUV's are being designed to accomplish a wide range of applications in the scientist, commercial and military areas. For oceanographic studies, AUV's have become very popular to explore, collect data, and to create 3D reconstructions or maps [1][2]. At the oil and gas industry, AUV's inspect and repair submerged infrastructures and also have great potential in search, recognition, and localization tasks like airplane black-boxes recovery missions [3][4]. AUV's are also used for port and harbor security tasks such as environmental inspection, surveillance, detection and disposal of explosives and minehunting [5][6].
Design, construction, and control of AUV's represent such a challenging work for engineers who must face constraints they do not encounter in other environments. Above water, most autonomous systems rely on radio or spread-spectrum communications along with global positioning. In underwater environments, AUV's must rely on acoustic-based sensors and communication. Design and implementation of new technologies and algorithms for navigation and localization of AUV's — especially for collaborative work—is a great research opportunity.
Before establishing a collaborative scheme for AUV's, the problem of localization and navigation must be addressed for every vehicle in the team. Traditional methods include Dead-Reckoning (DR) and Inertial Navigation Systems (INS) [7]. DR and INS are the longest established methods to locate an AUV [8]. These systems rely on measurements of the water-speed and the vehicle's velocities and accelerations that, upon integration, leads to the AUV position. They are suitable for long-range missions and have the advantage to be passive methods — they do not need either to send or receive signals from external systems — resulting in a solution immune to interferences. Nevertheless, the main problem of them is that the position error growths over time — which is commonly known as accuracy drift— as a result of different factors such as the ocean currents and the accuracy of the sensors itself, which are not capable of sensing the displacements produced by external forces or the effects of earth's gravity. The use of geophysical maps to matching the sensors measurements is an alternative to deal with the accuracy drifts of the inertial systems. This method is known as geophysical navigation [9] and allows accomplishing longer missions maintaining a position error relatively low. However, there is a need for having the geophysical maps available before the mission, which is one the main disadvantages of geophysical navigation along with the computational cost of comparing and matching the map with the sensors data. Acoustic ranging systems have been another common alternative for AUV's navigation [10]. These systems can be implemented using acoustic transponders to locate an AUV in either global or relative coordinates. However, most of them require complex infrastructure and the cost of such deployments could be higher compared with other methods. In recent years researchers are exploring new alternatives for AUV's localization and navigation. Optical technologies have become very popular for robots and vehicles at land or air environments [11], but face tough conditions in underwater environments that have delayed the development of such technologies for AUV's. When the underwater conditions permit a proper light propagation and detection, visual-based systems can improve significantly the accuracy of the position estimations and reach higher data rates that acoustic systems. Finally, recent advancements in terms of sensor fusion schemes and algorithms are contributing to the development of hybrid navigation systems, which takes the advantages of different solutions to overcome their weaknesses. A sensor fusion module improves the AUV state estimation by processing and merging the available sensors data [12]. Some of the common sensors used for it are the inertial sensors of an INS, Doppler Velocity Loggers (DVL) and depth sensors. Recently, the INS measurements are also being integrated with acoustic/vision-based systems to produce a solution that, beyond reducing the accuracy drifts of the INS, will have high positioning accuracy in short-ranges. All these technologies are addressed in section 2 of this work, which is organized as shown in Figure 1, including the main sensors used and the different approaches taken.
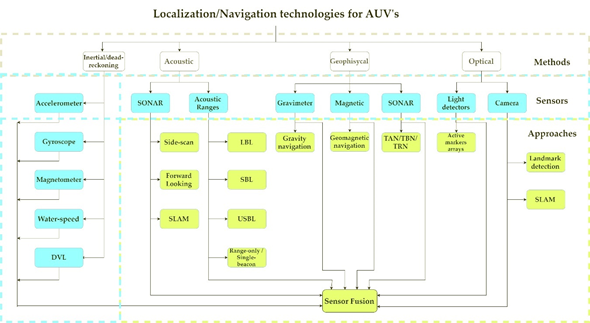
Figure 1. AUV technologies for localization and navigation.
After solving the problem of self-localization and navigation, other challenges must be addressed to implement a collaborative team of AUV's. Since there is a need for sharing information between the vehicles, communication is an important concern. The amount and size of the messages will depend on the collaborative scheme used, the number of vehicles and the communication system capabilities. Acoustic-based performs better than light-based communication in terms of range, but not in data rates. It also suffers from many other shortcomings such as small bandwidth, high latency and unreliability [13]. Radio-based communication, although it has notable merits in the terrestrial wireless network field, has had very few practical underwater applications to date [14]. The collaborative navigation scheme is also a must. The underwater environment is complex by itself to navigate at, and now multiple vehicles have to navigate among each other. A proper formation has to ensure safe navigation for every single vehicle. These topics are analyzed in section 3, which also includes a review on the main collaborative AUV's mission: surveillance and intervention. Since there is no need to interact with the environment, survey missions are simpler to implement and have been performed successfully for different applications, such as mapping or object search and tracking. Intervention missions are usually harder due to the complexity of the manipulators or actuators needed. In either case, since an experimental set up is difficult to reach, many of the efforts made are being tested in simulation environments.
2. Navigation and localization
Navigation and localization are two of the most important challenges for underwater robotics [11]. These continue being issues to solve for many applications such as collaborative missions. DR an INS are traditional methods for AUV's localization and navigation but have issues as the decrement of the pose accuracy over time. Besides traditional technologies, this problem was addressed in the past with acoustic technologies as Long Baseline (LBL) [15][16][17], Short Baseline (SBL) [18][19] or Ultra-Short Baseline (USBL) [20][21][22][23] systems. Acoustic positioning systems, though, require careful calibration of the sound velocity, as they suffer from multipath Doppler effects and susceptibility to thermoclines; they also have a limited range and accuracy [24]. Geophysical Navigation (GN) is also a solution for vehicle localization. Matching algorithms such as TERrain COntour-Matching (TERCOM) and Sandia Inertial Terrain Aided Navigation (SITAN) are relatively mature, and new algorithms continue being proposed [25]. The main limitation of GN systems is the need for a geophysical map to compare the measurements from the sensors. Visual-based systems have been a trend for vehicle navigation at land and air environments, but there are several problems related to light propagation and detection in underwater environments. Also, most visual-based methods for autonomous navigation depend on the presence of features in the images taken, which, even if they exist, are difficult to extract due to the limited illumination conditions. In recent years, the field of AUV's localization is shifting from old technologies, towards more dynamic approaches that require less infrastructure and offers a better performance [13]. This section presents a survey on single-vehicle localization and navigation technologies — including different methods, sensor, and approaches — in the understanding that those can be applied in multi-vehicle collaborative navigation schemes.
2.1. Dead-reckoning and inertial navigation
The simpler method to obtain a position for a moving vehicle is by integrating its velocity in time. This method is known as dead-reckoning [8]. DR requires to know the velocity and direction of the vehicle, which is usually accomplished with a compass and a water speed sensor. The principal problem is related to the presence of an ocean current because it will add a velocity component to the vehicle which is not detected by the speed sensor. Then, the accuracy of the method will be strongly affected especially when the vehicle navigates at a low velocity.
Inertial sensors can be used to improve the navigation accuracy and reliability of DR methods. The INS consist of three mutually-orthogonal accelerometers aligned to a gyroscopic reference frame. Measured accelerations are integrated to obtain the desired velocity, position, and attitude information of the vehicle. The fact that inertial navigation is self-contained — it neither emits nor receives any external signal — is one of its most significant strengths, making it a stealthy navigation solution, immune to interference or jamming [26]. However, the error on the pose estimations is known to increase over time, and depends on the accuracy of the sensors used.
The latest advances in MEMS inertial sensors are having profound effects on the recent availability of MEMS-IMU's, that has become clearly attractive for a wide range of applications where size, weight, power, and cost are key considerations [27]. This set of sensors can be used to implement an Attitude and Heading Reference System (AHRS) or an INS. However, technological developments in inertial sensors, INS are underway to reduce the accuracy drift at the level of a few meters uncertainty over one hour of unaided inertial navigation [28]. Currently, damping techniques, using water speed measurements, are used to control velocity and position errors caused by uncorrected vertical deflection and inertial sensor errors [29]. However, this is at the cost of introducing an additional error source (the water-speed/ground-speed difference caused by ocean currents). Another alternative to reduce these effects is the use of maps of vertical deflection compensation values, as a function of latitude and longitude, to compensate the measured accelerations.
2.2. Acoustic navigation
Compared with other signals, such radio and electromagnetic, acoustic-based signals propagates better in water and can reach considerable distances. This allows the use of acoustic transponders to navigate an AUV. Some of the navigation methods based on acoustic signals are the Sound Navigation And Ranging (SONAR), and acoustic ranging.
2.2.1. SONAR
There exist different methods to employ a SONAR for AUV's navigation. Two basic configurations are the side-scan SONAR [10] and the Forward-Looking SONAR (FLS) [30]. Both of them are used to detect objects which can be: seabed changes, rocks, other vehicles, and even marine species. When an AUV is in operation, it must be able to detect these objects to update its navigation trajectory and avoid collisions, which is known as obstacle avoidance.
For the side-scan SONAR, the transducer device scans laterally when attached to the AUV. A series of acoustic pings are transmitted and then received, the time of the returns and the speed of sound in water is used to determine the existence of features located perpendicular to the direction of motion.
The FLS uses a searchlight approach, steering the sonar beam scanning forward of the vessel and streaming soundings on a continuous basis. FLS can be placed at different locations on the vehicle to ensure that the AUV can detect obstacles from different directions.
Two-dimensional images can be produced which survey the ocean and the features on it. These images, while indicating what exists on the ocean or seafloor, do not contain localization information either relative or global.
Traditional obstacle avoidance planning methods include potential field, Bandler and Kohout (BK) products, particle swarm optimization, fuzzy controller, etc. [31][32][33]
2.2.2. Acoustic ranging
In acoustic ranging positioning systems, AUV's are equipped with an acoustic transmitter that establishes communication with a set of hydrophones. Knowing the propagation velocity of sound in underwater, the distance between the AUV and hydrophones can be calculated through the propagation time of the acoustic signal. Then, a location for the AUV with respect to the set of hydrophones can be obtained by geometric methods. One of the differences between acoustic systems is the arrangement of the hydrophones. In LBL systems, hydrophones are fixed within a structure or any other known underwater point of reference — known as landmark — [15] The length of the baseline can be up to hundreds of meters. In SBL and USBL systems, the hydrophones are placed on buoys or another vehicle at the surface, even on a second AUV. For SBL systems, baseline length is measured in meters and works by measuring a relative position between the reference sound source and the receiving array; meanwhile, baseline for USBL systems is in decimeters and the relative location from the hydrophone to the moving target is calculated by measuring the phase differences between acoustic elements [18]. In either arrangement, hydrophones are generally located by Global Navigation Satellite Systems.
There exists an error between the measured position and the actual position of the transmitter. Among other factors, it is caused by not considering the variations of sound velocity produced by changes in the underwater environment conditions such as depth, temperature, density, and salinity. The accuracy of an acoustic positioning system will depend on different factors such as the distance and depth operational range, the number and availability of hydrophones, and the operational frequency.
Although acoustic systems have been used in the past, they are still used as the main localization and navigation system for AUV's or teams of AUV's and Unmanned Surface Vehicles (USV's) [34][35][36].
Range-only — also known as Single-beacon — localization is another alternative to traditional acoustic localization systems that has gained attention in recent years [37][38][39][40]. The concept of range-only/ single-beacon positioning can be divided into two groups depending on the way they are used: (i) as a navigational aid for a moving vehicle, or (ii) localization of a stationary or moving target. All these methods use a set of ranges between a target and different static nodes, known as anchor nodes. Typically, these ranges can be obtained using the time of flight given the speed of sound in water. Then, the unknown underwater target position problem can be solved using trilateration, where in general, three or more points are needed in 2D dimensions and, at least, four points in 3D scenarios.
2.3 Geophysical navigation
To avoid the problem of INS drifts and the cost of infrastructure for underwater acoustic systems, geophysical navigation (GN) is a favorable alternative. These approaches match the sensors measurements with geophysical parameters such as bathymetry, magnetic field, and gravitational anomaly contained in a map. Navigation technology based on GN can correct the INS error over a long time [41], without the need to bring the AUV to the surface. The navigation algorithm estimates navigation errors, which are sent to the vehicle navigation system to correct its position. By providing continuous corrections, this method allows the vehicle to maintain required position accuracy without the need for external sensors, such a GPS. The main limitations of GN is the need for a map, available prior the mission, and the computational complexity of searching for a correlation within the map and the sensor estimations. In the other hand, the key advantage of GN over other technologies is the large operating range when in use. Given a map, GN provide bounded localization error with accuracies dependent on the DR navigation, the map resolution, and the sensitivity of the geophysical parameter to change vehicle state [42].
GN matching algorithms are classified in two different broad categories: batch methods and sequential methods [26]. The main algorithms for those methods have been TERCOM and Iterated Closest Contour Point (ICCP) [43] for batch methods; SITAN, Beijing university of aeronautics and astronautics Inertial Terrain-Aided Navigation (BITAN) and BITAN-II [25][29][44] for sequential methods. TERCOM correlates active range sensor observations with a digitized elevation database of terrain. Meanwhile, the essence of SITAN is the acquisition mode and tracking mode, which are basically a state-estimation problem based on an Extended Kalman Filter (EKF) after the non-linear system state equation and observed equation are linearized. Particle Filter (PF) and Bayesian estimators are also algorithms used in sequential methods.
2.3.1 Gravity navigation
As the earth's gravitational field is far from being uniform, the effects of a change in the local gravitational field are indistinguishable from accelerations of the vehicle which produces an error on INS. One alternative is complementing the INS with gravity navigation [45]. At the same time that an INS estimates the position of the vehicle, a gravity sensor — gravimeter or gradiometer— measures the gravity and gravity gradient where the AUV is located. A gravimeter measures gravity anomaly or the deviation in the magnitude of the gravity vector relative to a nominal earth model. A gradiometer is a pair of accelerometers with parallel input axes on a fixed baseline that measures gravity gradients or the rate of change of gravity with respect to linear displacement [28]. The difference in the accelerometer's output excludes the linear vehicle acceleration but contains the gradient of gravitation across the baseline. Based on the position and the measurements from the sensor, the database searches for the best fit of gravity and gravity gradient, and then the optimal matching position will be used to correct the position error of the INS.
2.3.2. Geomagnetic navigation
Geomagnetic Navigation relies on magnetic sensors and its essence is the Fitting of Two Point Sets (FTPS) process, where a marine geomagnetic map is used for matching [26]. Geomagnetic filed has many features which can be applied for matching [46], such as the intensity of the total field F , the horizontal component H , the north component X , the east component Y , the vertical component Z, the declination D, the inclination I, the geomagnetic gradient and so on. Different matching algorithms such as TERCOM and ICCP [7][47] has been explored for geomagnetic navigation.
2.3.3. Bathymetric navigation
One simple use of bathymetric maps for AUV navigation is the use of isobaths. An isobath is an imaginary curve that connects all points having the same depth below the surface. A controller [48] can be designed for an AUV to follow an isobath whit only low-level localization equipment — such as echo sounder — and ensures that it never leaves a pre-defined area. Terrain-Referenced Navigation (TRN), Terrain-Aided Navigation (TAN) and Terrain-Based Navigation (TBN) are all similar approaches for GN [49]. These systems estimate the errors in both a main navigation system — such as an INS — and the terrain database to provide a highly accurate position estimate relative to the digital terrain database. TBN operates by correlating the actual terrain profile overflow with the terrain information stored in the terrain database. Some efforts in this field can be found in [50][51][52].
2.4. Optical navigation
Optical technologies are a relevant option to provide information about the environment. These systems can be implemented either with a camera [53][54][55][56] or with an array of optical sensors [57]. Despite the poor transmission of light through water, which results in a limited range for imaging systems [58], different algorithms and techniques are being studied for this purpose.
2.5. Simultaneous Location And Mapping (SLAM)
SLAM is a technique that consists of a mobile robot, such as an AUV, being placed at an unknown location in an unknown environment and make it able to build a consistent map of the environment and determinate its location within this map [59]. Color codes can be used to represent information such as distance between the vehicle and obstacles.
There are different SLAM representation methods used to reconstruct the environment. Each one has its own shortcomings and advantages, choosing the best one depends on the application desired which can be inspection, navigation, interaction, etc. The principal representation methods are:
- landmark-based maps
- Occupancy grid maps
- Raw Dense Representations
- Boundary and Spatial-Partitioning Dense Representations
Underwater SLAM can be categorized in acoustic-based and vision-based [30]. The perception of optical devices is constrained by poor visibility and noise produced by sunlight in shallow waters. Moreover, they can provide high frequencies and high resolution for a lower cost than an acoustic system. On the other hand, a high-definition FLS can provide a promising alternative for working under challenging conditions. Some approaches are described in [60][61][62][63][64][65][66].
2.6. Sensor fusion
The main inconvenient of an INS is that the position and orientation accuracy drifts over time, so, to keep it under the limits expected for safe AUV navigation, the system must correct its error by comparing its position estimation with a fixed location measured from additional sensors — such as a GPS — periodically. To overcome this, the INS can be fused with other sensors. There are two main schemes for sensor fusion: loosely coupled (LC) and tightly coupled (TC). The basic difference is the data shared by the sensors. In an LC scheme, a solution for the position or orientation of the AUV is obtained for each sensor individually and then blended using a filter —such as a Kalman Filter (KF) — to obtain a more accurate and reliable solution. In a TC scheme, raw measurements of the sensors are processed directly on the filter to overcome problems as poor signal quality or limited coverage thanks to the filter's capabilities to predict the pose of the vehicle. In this case, a more robust filter is needed so variants of the KF are commonly used [67]— such as an EKF or Unscented Kalman Filter (UKF) —.Filter selection is essential to get a better solution for the vehicle's pose and, besides the sensor fusion approach adopted, accuracy, numerical efficiency, and computational complexity must be considered. LC and TC schemes are represented in Figure 2 with velocity estimation from an INS and a Doppler Velocity Logger (DVL) as example.
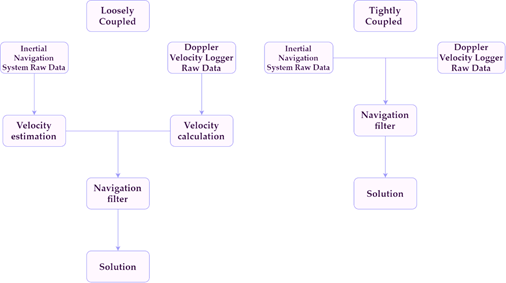
Figure 2. Loosely Coupled (LC) vs Tightly Coupled (TC) sensor fusion schemes.
Most of the sensor fusion systems for AUV navigation are those of an INS aided by a DVL; typically, the fusion is under an LC scheme [68][69][70] with a linear filter. However, in cases where the DVL measurements are limited, an LC algorithm leaves the INS to work alone. This produces an accumulative error which gets bigger with time. Considering this, alternatives based on a TC [71] and Extended Loosely Coupled (ELC) [72] schemes have been explored.
Another approach is the fusion of INS with acoustic systems [73][74] or artificial vision [75].
The EKF is the most widely used nonlinear filtering approach in TC schemes. EKF is based on a simple linear approximation to the nonlinear equations. However, there are too many unknown disturbance factors at underwater, and they cannot be established in suitable mathematical models in the kinematic equation. Other alternatives to a traditional EKF have been explored in [76][77].
The main alternatives for sensor fusion based on an INS are summarized in Figure 3.
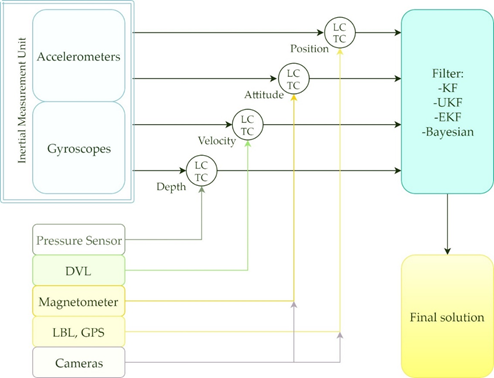
Figure 3. Sensor fusion alternatives for AUV positioning.
2.7 Localization and navigation overview
General conclusions in terms of sensors performance for non-traditional AUV navigation and localization technologies are shown in Table 1.
Table 1. Technologies for AUV localization and navigation
|
Navigation technology |
Approaches |
Information available |
Accuracy |
Range |
Results |
|
Acoustic |
SONAR |
Distance from obstacles. |
Depending on distance from obstacles, from 5 - 10 cm to more than a meter (10 - 120 cm). |
From 5 m up to hundreds of meters from obstacles. |
Experimental in real conditions. |
|
Acoustic range (LBL, SBL, USBL). |
Position |
Depending on distance from hydrophone array and the frequency, from some centimeters up to tens of meters. |
Up to tens of meters from the array. |
Experimental in real conditions. |
|
|
Geophysical |
Gravity, geomagnetic, TAN, TRN, TBN |
Position |
Meters. Depending on the map resolution and filter applied. |
Kilometers from initial position. |
Simulation, Experimental under controlled conditions. |
|
Optical |
Light sensors. |
Position and orientation relative to a target. |
Up to 20 cm for position and 10 ° for orientation. |
1–20 m from markers. |
Simulation, Experimental under controlled conditions. |
|
Cameras |
Up to 1 cm for position and 3 ° for orientation. |
1–20 m from markers. |
Experimental in real conditions. |
||
|
SLAM |
Acoustic |
Position and orientation relative to the mapped environment. |
From some centimeters up to more than a meter. |
Up to tens of meters from targets. |
Experimental in real conditions. |
|
Cameras |
1–10 m from targets. |
Simulations, Experimental under controlled conditions.
|
|||
|
Sensor fusion |
ELC, LC, TC. |
Position, orientation and velocity. |
Depending on the approach and filter applied, accumulative error can be reduced up to some meters (5 – 20) |
Kilometers from initial position. |
Simulations, Experimental. |
After the literature review, it can be considered that acoustic-based technologies still a reliable alternative for AUV localization and navigation; although they require more infrastructure than others. Future work must consider the possibility to include them in teams of collaborative AUV's. To achieve that, acoustic systems must overcome low updated rates and limited accuracy (at long ranges) in order to avoid collisions in AUV's formations, especially when they are navigating in a few meters of each other's. On the other hand, visual-based localization technologies — including SLAM — have gained attention in recent years. These technologies can estimate both, position and orientation, contrary to acoustic methods. They also reach a higher accuracy which is critical for the collaborative navigation of AUV's. Thus, it is an interesting and reliable option for some particular tasks under specific environments. Nevertheless, most of them are on an early level of readiness since they have been tested only in very controlled environments. It seems difficult for visual-based systems to overcome the challenging conditions of underwater. Moreover, it is hard for researches to find the proper conditions to test their visual-based and visual-SLAM algorithms in real underwater conditions. To deal with that, some datasets are being collected such as the AQUALOC dataset [78], which is dedicated to the development of SLAM methods for underwater vehicles navigating close to the seabed. The Autonomous Field Robotics Laboratory (AFRB) [79] has some datasets available for the same purpose.
3. Collaborative AUV's
Once the navigation and localization problem for the AUV's is solved, a scheme for collaborative work between a group of robots can be proposed. Collaborative work refers to an interaction of two or more AUV's to perform a common task which can be collaborative navigation, exploration, target search, and object manipulation. Using a team of AUV's navigating on a certain formation has the potential to significantly expand the applications for underwater missions; such as those that require proximity to the seafloor or to cover a wide area for search, recovery or reconstruction. At first, researchers focused their work on how multiple vehicles could obtain data simultaneously from the same area of interest. Nowadays, their focus has moved to the trajectory design and operation strategies for those multi-vehicle systems [80].
3.1. Communication
The rapid attenuation of higher frequency signals and the unstructured nature of the undersea environment make difficult to establish a radio communication system for AUV's. For those reasons, wireless transmission of signals underwater — especially for distances longer than 100 m — relies almost only on acoustic waves [14][81]. Underwater acoustic communication using acoustic modems consists of transforming a digital message into sound that can be transmitted under water. The performance of these systems changes dramatically depending on the application and the range of operation [82]. The main factors to choose an underwater acoustic modem are:
-
Application: Consider the type and length of message (Command and control messages, voice messages, image streaming, etc.) frequency of operation and operating depth.
-
Cost: Depending on the complexity and performance, from some hundreds up to $50,000 (USD).
-
Size: Usually cylindrical, with lengths from 10 cm to 50 cm.
-
Bandwidth: Acoustic modems can perform underwater communication at up to some kb/s. Length of the message and time limitations must be considered
-
Range: Range of operation for the vehicle's communication has impact on the cost of the system. Acoustic modems are suitable from short distances up to tens of km. Considerer than a longer range will increase the latency and power consumption of the system.
-
Power consumption: Depending on the range and modulation, the power consumption is in the range of 0.1 W to 1 W in receiving mode and 10 W to 100 W in transmission mode.
The working principles of underwater acoustic communication can be described as follows [83]: First, information is converted into an electrical signal by an electrical transmitter. Second, after digital processing by an encoder, the transducer converts the electrical signal into an acoustic signal. Third, the acoustic signal propagates through the medium of water and propagates the information to the receiving transducer. In this case, the acoustic signal is converted into an electrical signal. Finally, after the digital signal is deciphered by the decoder, the information is converted to an audio, text or picture by the electrical receiver.
Acoustic communications face many challenges, such as, small bandwidth, low data rate, high latency and ambient noise [84]. These shortcomings might provoke that a cycle of communication in a collaborative mission take several seconds, or even more than a minute.
The absence of an underwater communication standard has been a problem for collaborative teams of AUV's. In 2014, Potter et al. presented the JANUS underwater communication standard [85], a basic and robust tool for collaborative underwater communications designed and tested by the NATO Centre for Maritime Research and Experimentation. This opened the possibilities for simple integration of different robots using this standard [86][87][88][89] for collaborative tasks as underwater surveillance.
To improve the performance of underwater communication, optical technologies have been tested either stand-alone [90][91] or as a complement for an acoustic system [81]. Laser submarine communication has some advantages such as a high bit rate, higher security and broad bandwidth. Blue-green light (whose wavelength is 470 nm-580 nm) penetrates water better and its energy attenuation is less than any other wavelength light [92]. Thus, researchers have explored optical underwater communication systems based in blue-green light, to allow an underwater vehicle to receive a message from an aerial/spatial system at any depth despite its actual speed, course, and distance from the transmitter [90][91][93].
3.2. Collaborative navigation
Groups of AUV's can work together under different navigation schemes, which are generally parallel or leader-follower [83]. On a parallel formation all AUV's are equipped with the same systems and sensors, to locate and navigate themselves precisely and to communicate with its neighbors AUV's.
In a leader-follower scheme the leader AUV is equipped with high-precision instruments meanwhile followers AUV's are equipped with low-precision equipment [94]. Communication is only required between the vehicle leader and its followers, there is no need for the followers to communicate with each other.
The lower cost and the reduced communications needs make the leader-follower scheme a suitable navigation control method of AUV's [95][96][97] Its basic principles and algorithms are relatively mature [83]. However, unstable communications and communication delays are still challenging problems and need to be addressed. Since there are problems with signals when multiple systems emit at the same time, co-localization of AUV's is mostly based on time synchronization. However, time synchronization methods have some shortcomings such as the need for AUV's to go to surface to receive the synchronization signal.
When AUV's navigate in closed formations, the delay between the transmission and reception of the acoustic signals represents a high risk. Therefore, a solution with a response time significantly faster must be explored [11].
Other alternatives for cooperative navigation of AUV's is the use of systems that allow the vehicles within a team to help each other with their localization [98][99][100].
3.3. Collaborative missions
Surveillance and intervention are typically the kinds of missions designed for teams of AUV's. Surveillance missions require the AUV's to detect, localize, follow, and classify targets, inspect or explore the ocean. Meanwhile, intervention missions require the AUV's to interact with objects within the environment.
3.3.1 Search missions
A good search mission needs to minimize the number of vehicles required and maximize the efficiency of the search. Oceanic, biologic, and geologic variability of underwater environments impact in the search performance of teams of AUV's. To address search planning in these conditions, where the detection process is prone to false alarms, some works have been made using different approaches such as game theory [101], perceptual adaptive dynamic prediction [102] and Neural Networks (NN) [103][104].
3.3.2 Intervention missions
Manipulating objects, repairing structures or pipes, recovering black-boxes, extracting samples, among other tasks, make it necessary to have a platform with the capacity of autonomously navigate and perform them, since nowadays these are mostly done by manned or remotely operated vehicles. Researchers have worked in recent years in the design and development of such platforms, which results difficult even for a single Intervention AUV (I-AUV) due to the complexity of the vehicle itself plus the manipulator system [105][106]. Projects, such as the Italian national project MARIS [107] have been launched to produce theoretical, simulated and experimental results for intervention AUV's either standalone or for collaborative teams. For collaborative I-AUV's, the transportation of objects in underwater environments using two or more manipulator vehicles has been addressed at simulated environments [108][109][110][111][112].
A summary of collaborative AUV's missions is presented in Table 2, as well as the potential applications and the strategies proposed in recent years.
Table 2. Summary on collaborative AUV missions
|
Missions |
Applications |
Approaches |
Results |
|
|
Collaborative surveillance |
Searching Tracking Mapping Inspecting |
Game theory. Dynamic prediction theory. Glasius bio-inspired neural networks. Consensus dynamics. |
Acoustic systems |
Simulation and Experimental
|
|
Active landmarks and cameras |
||||
|
Collaborative intervention |
Recovering Manipulating |
Decentralized strategies Minimal information exchange strategy Nonlinear model predictive control |
Simulation |
|
3.4. Collaborative AUV's overview
Nature of underwater environments makes the use of communication systems with high-frequency signals difficult. This due to the rapid attenuation that permits propagation only at very short distances. Acoustic signals have a better performance, but face many challenges such as signal interferences and small bandwidth, which results in the need for time synchronization methods and hence, produce a high latency in the system. Another option is a light-based system, which offers a higher bandwidth but at short/medium ranges. Blue/green light has better propagation in underwater than any other light; but, when the range for communication is increased, the power consumption, weight, and volume of the equipment required also increase.
If the inter-vehicle communication system is good enough in terms of range, bandwidth and rate, range-only/single-beacon can be an effective method for target localization and collaborative navigation of teams of AUV's. Vision-based systems are also an option that has the potential to control AUV's formations without the need of relying on inter-vehicle communications, but only if the environmental conditions are favorable for light propagation and sensing.
Collaborative missions are quite difficult to implement in real conditions. Assembling a team of AUV's with the proper technology to overcome localization, navigation, and communication shortcomings results difficult for researchers who have to limit their proposals to numerical simulations. Most of the authors use MATLAB Simulink to perform their simulations and some tools such as the former SimMechanics (now called Simscape Multibody). Another simulation environment commonly used for underwater robotics is the UnderWater Simulator (UWSim) [113]. With those tools, researches are working in pushing the state-of-the-art in terms of control, localization, and navigation algorithms. Within them, machine learning algorithms are gaining quite an attention. They are being employed in different aspects such as navigation [114][115], obstacle avoidance and multi-AUV's formation control.
4. Conclusions
A review of different alternatives for underwater localization, communication, and navigation of Autonomous Underwater Vehicles is addressed in this work. Although section 2 discusses single-vehicle localization and navigation, the aim of this work is to show that those technologies are being applied to multi-vehicles systems, or can be implemented in the future. Every underwater mission is different and has its own limitations and challenges. For that reason, it is not possible to state which localization or navigation system has the best performance. For a long-range mission (kilometers) an accuracy of tens or hundreds of meters from an inertial-based navigation system can be acceptable, as the main characteristic wanted for it is the long-range capacity. In a small navigation environment, i.e. a docking station or a laboratory tank, there is a need for much better accuracy to avoid collisions with the tank's walls. In that situation, an SBL/USBL system at an operation frequency of 200 kHz can perform with errors in centimeters range or, if the water conditions are favorable, a visual-based system can perform even better at a lower cost.
Current achievements in the field of collaborative AUV's has been also presented, including communication, collaborative localization and navigation, surveillance and intervention missions. The use of a hybrid (acoustic and light-based) system is a promising option for the communication of collaborative AUV's. The acoustic sub-system can handle the long-range communications meanwhile the light-based takes care of the inter-vehicle communication where a high rate is critical for collision avoidance. A hybrid system can be an interesting alternative also for collaborative navigation. Acoustic methods can be implemented in a team of AUV's for medium/long-range navigation meanwhile a visual-based method is used to maintain the formation and avoid collisions between the vehicles. In terms of algorithms, machine learning seems to be one of the best approaches to achieve collaborative navigation and to give a team the capacity to perform complex surveillance and intervention missions. Relating to collaborative intervention missions, which mostly have been addressed with numerical simulations, the next step is to test the algorithms in real experiments. Such experimentation can be done in controlled conditions, such as a laboratory tank, where the vehicles would not have to deal with the changing conditions of the sea, so researches can focus on the collaborative task algorithms such as the carrying of an object by two vehicles.
This entry is adapted from the peer-reviewed paper 10.3390/app10041256
References
- Stephanie Petillo; Henrik Schmidt; Exploiting Adaptive and Collaborative AUV Autonomy for Detection and Characterization of Internal Waves. IEEE Journal of Oceanic Engineering 2013, 39, 150-164, 10.1109/JOE.2013.2243251.
- Miquel Massot-Campos; G. Oliver; Optical Sensors and Methods for Underwater 3D Reconstruction. Sensors 2015, 15, 31525-31557, 10.3390/s151229864.
- Xu Jian; Chen Xiaoyuan; Song Xiaoping; Li Hang; Target recognition and location based on binocular vision system of UUV. 2015 34th Chinese Control Conference (CCC) 2015, 1, 3959-3963, 10.1109/chicc.2015.7260249.
- Pere Ridao; Marc Carreras; David Ribas; Pedro J Sanz; G. Oliver; Pere Ridao; Intervention AUVs: The Next Challenge. IFAC Proceedings Volumes 2013, 47, 12146-12159, 10.3182/20140824-6-za-1003.02819.
- Nuno Abreu; Anibal Matos; Minehunting Mission Planning for Autonomous Underwater Systems Using Evolutionary Algorithms. Unmanned Systems 2014, 2, 323-349, 10.1142/s2301385014400081.
- Scott Reed; Jon Wood; Chris Haworth; The detection and disposal of IED devices within harbor regions using AUVs, smart ROVs and data processing/fusion technology. 2010 International WaterSide Security Conference 2010, , , 10.1109/wssc.2010.5730276.
- Zhixin Ren; Longwei Chen; Hui Zhang; Meiping Wu; Research on geomagnetic-matching localization algorithm for unmanned underwater vehicles. 2008 International Conference on Information and Automation 2008, , , 10.1109/icinfa.2008.4608149.
- Leonard, J.J.; Bennett, A.A.; Smith, C.M.; Feder, H.J.S.; Autonomous Underwater Vehicle Navigation. MIT Mar. Robot. Lab. Tech. Memo 1998, 1, 1-17, .
- Hugh Rice; Steven Kelmenson; Louis Mendelsohn; Geophysical navigation technologies and applications. PLANS 2004 Position Location and Navigation Symposium (IEEE Cat No 04CH37556) PLANS-04 2004, , , 10.1109/plans.2004.1309051.
- Maurice F. Fallon; Michael Kaess; Hordur Johannsson; John J. Leonard; Efficient AUV navigation fusing acoustic ranging and side-scan sonar. 2011 IEEE International Conference on Robotics and Automation 2011, , , 10.1109/icra.2011.5980302.
- Josep Bosch; Nuno Gracias; Pere Ridao; Klemen Istenič; David Ribas; Close-Range Tracking of Underwater Vehicles Using Light Beacons. Sensors 2016, 16, 429, 10.3390/s16040429.
- Tudor Nicosevici; Rafael Garcia; Marc Carreras; Miquel Villanueva; A review of sensor fusion techniques for underwater vehicle navigation. Oceans 04 MTS/IEEE Techno-Ocean 04 (IEEE Cat No 04CH37600) OCEANS-04 2005, , , 10.1109/oceans.2004.1406361.
- Liam Paull; Sajad Saeedi; Mae Seto; Howard Li; AUV Navigation and Localization: A Review. IEEE Journal of Oceanic Engineering 2013, 39, 131-149, 10.1109/JOE.2013.2278891.
- Xianhui Che; Ian Wells; Gordon Dickers; Paul Kear; Xiaochun Gong; Re-evaluation of RF electromagnetic communication in underwater sensor networks. IEEE Communications Magazine 2010, 48, 143-151, 10.1109/MCOM.2010.5673085.
- Zhao Li; Stan E. Dosso; Dajun Sun; Motion-Compensated Acoustic Localization for Underwater Vehicles. IEEE Journal of Oceanic Engineering 2016, 41, 840-851, 10.1109/joe.2015.2503518.
- Jucheng Zhang; Yunfeng Han; Cuie Zheng; Dajun Sun; Underwater target localization using long baseline positioning system. Applied Acoustics 2016, 111, 129-134, 10.1016/j.apacoust.2016.04.009.
- Yunfeng Han; Cuie Zheng; Dajun Sun; Accurate underwater localization using LBL positioning system. OCEANS 2015 - MTS/IEEE Washington 2015, , , 10.23919/oceans.2015.7401893.
- Zhai Yuyi; Gong Zhenbang; Wang Lei; Zhang Ruiyong; Luo Huanxin; Study of Underwater Positioning Based on Short Baseline Sonar System. 2009 International Conference on Artificial Intelligence and Computational Intelligence 2008, 2, 343-346, 10.1109/aici.2009.83.
- S.M. Smith; D. Kronen; Experimental results of an inexpensive short baseline acoustic positioning system for AUV navigation. Oceans '97. MTS/IEEE Conference Proceedings 2002, , , 10.1109/oceans.1997.634454.
- Riccardo Costanzi; Niccolo Monnini; Alessandro Ridolfi; Benedetto Allotta; Andrea Caiti; On field experience on underwater acoustic localization through USBL modems. OCEANS 2017 - Aberdeen 2017, , , 10.1109/oceanse.2017.8084996.
- Morgado, M.; Oliveira, P.; Silvestre, C.; Experimental evaluation of a USBL underwater positioning system. Int. Symp. Electron 2010, , , .
- Yulin Xu; Wenqian Liu; Xin Ding; Pengfei Lv; Chen Feng; Bo He; Tianhong Yan; USBL Positioning System Based Adaptive Kalman Filter in AUV. 2018 OCEANS - MTS/IEEE Kobe Techno-Oceans (OTO) 2018, , , 10.1109/oceanskobe.2018.8559453.
- Joel Oliveira Reis; Marco Morgado; Pedro Batista; Paulo Oliveira; Carlos Silvestre; Design and Experimental Validation of a USBL Underwater Acoustic Positioning System. Sensors 2016, 16, 1491, 10.3390/s16091491.
- Yvan R. Petillot; Gianluca Antonelli; Giuseppe Casalino; Fausto Ferreira; Underwater Robots: From Remotely Operated Vehicles to Intervention-Autonomous Underwater Vehicles. IEEE Robotics & Automation Magazine 2019, 26, 94-101, 10.1109/mra.2019.2908063.
- D. Vaman; Vaman D.; TRN history, trends and the unused potential. 2012 IEEE/AIAA 31st Digital Avionics Systems Conference (DASC) 2012, , , 10.1109/dasc.2012.6382278.
- José Melo; Anibal Matos; Survey on advances on terrain based navigation for autonomous underwater vehicles. Ocean Engineering 2017, 139, 250-264, 10.1016/j.oceaneng.2017.04.047.
- Michael Perlmutter; Laurent Robin; High-performance, low cost inertial MEMS: A market in motion!. Proceedings of the 2012 IEEE/ION Position, Location and Navigation Symposium 2012, , , 10.1109/plans.2012.6236884.
- Christopher Jekeli; Precision Free-Inertial Navigation with Gravity Compensation by an Onboard Gradiometer. Journal of Guidance, Control, and Dynamics 2006, 29, 704-713, 10.2514/1.15368.
- Hugh Rice; Louis Mendelsohn; Robert Aarons; Daniel Mazzola; Next generation marine precision navigation system. IEEE 2000. Position Location and Navigation Symposium (Cat. No.00CH37062) 2002, , , 10.1109/plans.2000.838303.
- Natàlia Hurtós; David Ribas; Xavier Cufí; Yvan R. Petillot; Joaquim Salvi; Fourier-based Registration for Robust Forward-looking Sonar Mosaicing in Low-visibility Underwater Environments. Journal of Field Robotics 2014, 32, 123-151, 10.1002/rob.21516.
- C. Galarza; I. Masmitjà; J. Prat; Spartacus Gomáriz; Design of obstacle detection and avoidance system for Guanay II AUV. 2016 24th Mediterranean Conference on Control and Automation (MED) 2016, , , 10.1109/med.2016.7535959.
- Boris Braginsky; Hugo Guterman; Obstacle Avoidance Approaches for Autonomous Underwater Vehicle: Simulation and Experimental Results. IEEE Journal of Oceanic Engineering 2016, 41, 882-892, 10.1109/joe.2015.2506204.
- Changjian Lin; Hongjian Wang; Jianya Yuan; Dan Yu; Chengfeng Li; An improved recurrent neural network for unmanned underwater vehicle online obstacle avoidance. Ocean Engineering 2019, 189, 106327, 10.1016/j.oceaneng.2019.106327.
- Pedro Batista; Carlos Silvestre; Paulo Oliveira; Tightly coupled long baseline/ultra-short baseline integrated navigation system. International Journal of Systems Science 2014, 47, 1-19, 10.1080/00207721.2014.955070.
- Antonio Vasilijević; Dula Nad; Filip Mandic; Nikola Miskovic; Zoran Vukic; Coordinated Navigation of Surface and Underwater Marine Robotic Vehicles for Ocean Sampling and Environmental Monitoring. IEEE/ASME Transactions on Mechatronics 2017, 22, 1174-1184, 10.1109/tmech.2017.2684423.
- Edoardo I. Sarda; Manhar R. Dhanak; Launch and Recovery of an Autonomous Underwater Vehicle From a Station-Keeping Unmanned Surface Vehicle. IEEE Journal of Oceanic Engineering 2018, 44, 290-299, 10.1109/joe.2018.2867988.
- I. Masmitjà; Spartacus Gomáriz; J. Del Rio; B. Kieft; T. O'reilly; Range-only underwater target localization: Path characterization. OCEANS 2016 MTS/IEEE Monterey 2016, , , 10.1109/oceans.2016.7761246.
- Mohammadreza Bayat; Naveen Crasta; A. Pedro Aguiar; António M. Pascoal; Bayat M.; Crasta N.; Aguiar A.P.; Pascoal A.M.; Range-Based Underwater Vehicle Localization in the Presence of Unknown Ocean Currents: Theory and Experiments. IEEE Transactions on Control Systems Technology 2015, 24, 122-139, 10.1109/tcst.2015.2420636.
- Guillem Vallicrosa; Pere Ridao; Guillem Vallicrosa Massaguer; Sum of gaussian single beacon range-only localization for AUV homing. Annual Reviews in Control 2015, 42, 177-187, 10.1016/j.arcontrol.2016.09.007.
- Tao Zhang; Ziqiang Wang; Yao Li; Jinwu Tong; A Passive Acoustic Positioning Algorithm Based on Virtual Long Baseline Matrix Window. Journal of Navigation 2018, 72, 193-206, 10.1017/s0373463318000590.
- Feizhou Zhang; Xiuwan Chen; Min Sun; Ming Yan; Dongkai Yang; Simulation study of underwater passive navigation system based on gravity gradient. IEEE International IEEE International IEEE International Geoscience and Remote Sensing Symposium, 2004. IGARSS '04. Proceedings. 2004 2004, , , 10.1109/igarss.2004.1370357.
- Meduna, D.K. Terrain Relative Navigation for Sensor-Limited Systems with Applications to Underwater Vehicles, Standford University, 2011
- Erhu Wei; Cuijun Dong; Yali Yang; Shenquan Tang; Jiandong Liu; Guangyu Gong; Zhihong Deng; A Robust Solution of Integrated SITAN with TERCOM Algorithm: Weight-Reducing Iteration Technique for Underwater Vehicles' Gravity-Aided Inertial Navigation System. NAVIGATION 2017, 64, 111-122, 10.1002/navi.176.
- Yubo Pei; Zhe Chen; Jason C. Hung; BITAN-II: an improved terrain aided navigation algorithm. Proceedings of the 1996 IEEE IECON. 22nd International Conference on Industrial Electronics, Control, and Instrumentation 2002, , , 10.1109/iecon.1996.570665.
- Yurong Han; Bo Wang; Zhihong Deng; Mengyin Fu; A Combined Matching Algorithm for Underwater Gravity-Aided Navigation. IEEE/ASME Transactions on Mechatronics 2018, 23, 233-241, 10.1109/tmech.2017.2774296.
- Caifa Guo; Li Anliang; Hong Cai; Yang Huabo; Algorithm for geomagnetic navigation and its validity evaluation. 2011 IEEE International Conference on Computer Science and Automation Engineering 2011, 1, 573-577, 10.1109/csae.2011.5953286.
- Jianhu Zhao; Shengping Wang; Aixue Wang; Study on underwater navigation system based on geomagnetic match technique. 2009 9th International Conference on Electronic Measurement & Instruments 2009, , , 10.1109/icemi.2009.5274338.
- Jaulin, L.; Isobath following using an altimeter as a unique exteroceptive sensor. CEUR Workshop Proc 2018, 2331, 105-110, .
- M. Cowie; N. Wilkinson; R. Powlesland; Latest development of the TERPROM® Digital Terrain System (DTS). 2008 IEEE/ION Position, Location and Navigation Symposium 2007, , , 10.1109/plans.2008.4570042.
- Long Zhao; Nan Gao; Baoqi Huang; Qingyun Wang; Jianhua Zhou; A Novel Terrain-Aided Navigation Algorithm Combined With the TERCOM Algorithm and Particle Filter. IEEE Sensors Journal 2015, 15, 1124-1131, 10.1109/jsen.2014.2360916.
- Georgios Salavasidis; Andrea Munafo'; Catherine A. Harris; Thomas Prampart; Robert Templeton; Micheal Smart; Daniel T. Roper; Miles Pebody; Stephen D. McPhail; E. Rogers; et al. Terrain‐aided navigation for long‐endurance and deep‐rated autonomous underwater vehicles. Journal of Field Robotics 2018, , , 10.1002/rob.21832.
- Deborah K. Meduna; Stephen M. Rock; Robert S. McEwen; Closed-loop terrain relative navigation for AUVs with non-inertial grade navigation sensors. 2010 IEEE/OES Autonomous Underwater Vehicles 2010, , , 10.1109/auv.2010.5779659.
- Lijia Zhong; De-Jun Li; Mingwei Lin; Ri Lin; Can-Jun Yang; A Fast Binocular Localisation Method for AUV Docking.. Sensors 2019, 19, 1735, 10.3390/s19071735.
- Shuang Liu; Hongli Xu; Yang Lin; Lei Gao; Visual Navigation for Recovering an AUV by Another AUV in Shallow Water.. Sensors 2019, 19, 1889, 10.3390/s19081889.
- Jesus Monroy; Cyril Rouviere; Eduardo Campos-Mercado; Tomás Salgado-Jiménez; Luis Govinda García-Valdovinos; Modeling and Control of a Micro AUV: Objects Follower Approach. Sensors 2018, 18, 2574, 10.3390/s18082574.
- Mario Prats; David Ribas; Narcís Palomeras; Juan Carlos Garcia; Volker Nannen; Stephan Wirth; José Javier Fernández; Joan P. Beltrán; Ricard Campos; Pere Ridao; et al. Reconfigurable AUV for intervention missions: a case study on underwater object recovery. Intelligent Service Robotics 2011, 5, 19-31, 10.1007/s11370-011-0101-z.
- Firat Eren; Shachak Pe’Eri; May-Win Thein; Yuri Rzhanov; Barbaros Celikkol; M. Robinson Swift; Position, Orientation and Velocity Detection of Unmanned Underwater Vehicles (UUVs) Using an Optical Detector Array. Sensors 2017, 17, 1741, 10.3390/s17081741.
- Gero Nootz; Ewa Jarosz; Fraser R. Dalgleish; Weilin Hou; Quantification of optical turbulence in the ocean and its effects on beam propagation. Applied Optics 2016, 55, 8813-8820, 10.1364/ao.55.008813.
- H. Durrant-Whyte; T. Bailey; Simultaneous localization and mapping: part I. IEEE Robotics & Automation Magazine 2006, 13, 99-110, 10.1109/MRA.2006.1638022.
- Juan David Hernandez; Klemen Istenič; Nuno Gracias; Narcís Palomeras; Ricard Campos; Eduard Vidal; Rafael Garcia; Marc Carreras; Autonomous Underwater Navigation and Optical Mapping in Unknown Natural Environments. Sensors 2016, 16, 1174, 10.3390/s16081174.
- Albert Palomer; Pere Ridao; David Ribas; Multibeam 3D Underwater SLAM with Probabilistic Registration. Sensors 2016, 16, 560, 10.3390/s16040560.
- Chris Roman; Hanumant Singh; Consistency based error evaluation for deep sea bathymetric mapping with robotic vehicles. Proceedings 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006. 2006, , , 10.1109/robot.2006.1642247.
- Ruben Gomez-Ojeda; Francisco-Angel Moreno; David Zuñiga-Noël; Davide Scaramuzza; Javier Gonzalez-Jimenez; PL-SLAM: A Stereo SLAM System Through the Combination of Points and Line Segments. IEEE Transactions on Robotics 2019, 35, 734-746, 10.1109/tro.2019.2899783.
- Ran Wang; Xin Wang; Mingming Zhu; Yinfu Lin; Application of a Real-Time Visualization Method of AUVs in Underwater Visual Localization. Applied Sciences 2019, 9, 1428, 10.3390/app9071428.
- Maxime Ferrera; Julien Moras; Pauline Trouvé-Peloux; Vincent Creuze; Denis Dégez; The Aqualoc Dataset: Towards Real-Time Underwater Localization from a Visual-Inertial-Pressure Acquisition System. null 2018, , , .
- Bharat Joshi; Nikolaos Vitzilaios; Ioannis Rekleitis; Sharmin Rahman; Michail Kalaitzakis; Brennan Cain; James Johnson; Marios Xanthidis; Nare Karapetyan; Alan Hernandez; et al. Experimental Comparison of Open Source Visual-Inertial-Based State Estimation Algorithms in the Underwater Domain. 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2019, , , 10.1109/iros40897.2019.8968049.
- Benedetto Allotta; Luigi Chisci; Riccardo Costanzi; Francesco Fanelli; Claudio Fantacci; Enrico Meli; Alessandro Ridolfi; Andrea Caiti; Francesco Di Corato; Davide Fenucci; et al. A comparison between EKF-based and UKF-based navigation algorithms for AUVs localization. OCEANS 2015 - Genova 2015, , , 10.1109/oceans-genova.2015.7271681.
- Wanli Li; Lundong Zhang; Fuping Sun; Li Yang; Mingjian Chen; Ying Li; Alignment calibration of IMU and Doppler sensors for precision INS/DVL integrated navigation. Optik 2015, 126, 3872-3876, 10.1016/j.ijleo.2015.07.187.
- A. Rossi; M. Pasquali; M. Pastore; Performance analysis of an inertial navigation algorithm with DVL auto-calibration for underwater vehicle. 2014 DGON Inertial Sensors and Systems (ISS) 2014, , , 10.1109/inertialsensors.2014.7049481.
- Wei Gao; Jingchun Li; Guangtao Zhou; Qian Li; Adaptive Kalman Filtering with Recursive Noise Estimator for Integrated SINS/DVL Systems. Journal of Navigation 2014, 68, 142-161, 10.1017/s0373463314000484.
- Peijia Liu; Bo Wang; Zhihong Deng; Mengyin Fu; INS/DVL/PS Tightly Coupled Underwater Navigation Method With Limited DVL Measurements. IEEE Sensors Journal 2018, 18, 2994-3002, 10.1109/jsen.2018.2800165.
- Asaf Tal; Itzik Klein; Reuven Katz; Inertial Navigation System/Doppler Velocity Log (INS/DVL) Fusion with Partial DVL Measurements. Sensors 2017, 17, 415, 10.3390/s17020415.
- Tao Zhang; Hongfei Shi; Liping Chen; Yao Li; Jinwu Tong; AUV Positioning Method Based on Tightly Coupled SINS/LBL for Underwater Acoustic Multipath Propagation. Sensors 2016, 16, 357, 10.3390/s16030357.
- Tao Zhang; Liping Chen; Yao Li; AUV Underwater Positioning Algorithm Based on Interactive Assistance of SINS and LBL. Sensors 2015, 16, 42, 10.3390/s16010042.
- Adrian Manzanilla; Sergio Reyes; Miguel Garcia; Diego Mercado; Rogelio Lozano; Sergio Reyes Sanchez; Miguel Angel Garcia Rangel; Diego Alberto Mercado Ravell; Autonomous Navigation for Unmanned Underwater Vehicles: Real-Time Experiments Using Computer Vision. IEEE Robotics and Automation Letters 2019, 4, 1351-1356, 10.1109/lra.2019.2895272.
- Ngdong Li; Daxiong Ji; Jian Liu; Yang Lin; A Multi-Model EKF Integrated Navigation Algorithm for Deep Water AUV. International Journal of Advanced Robotic Systems 2015, 13, 3, 10.5772/62076.
- Yiming Chen; Dongfang Zheng; Paul A. Miller; Jay A. Farrell; Underwater inertial navigation with long base line transceivers: A Near-Real-Time approach. 52nd IEEE Conference on Decision and Control 2013, , , 10.1109/cdc.2013.6760680.
- Maxime Ferrera; Vincent Creuze; Julien Moras; Pauline Trouvé-Peloux; AQUALOC: An underwater dataset for visual–inertial–pressure localization. The International Journal of Robotics Research 2019, 38, 1549-1559, 10.1177/0278364919883346.
- Autonomous Fiel Robotic Laboratory - Datasets . Autonomous Fiel Robotic Laboratory . Retrieved 2020-8-17
- Jimin Hwang; Neil Bose; Shuangshuang Fan; AUV Adaptive Sampling Methods: A Review. Applied Sciences 2019, 9, 3145, 10.3390/app9153145.
- N. Farr; A. Bowen; J. Ware; C. Pontbriand; M. Tivey; An integrated, underwater optical /acoustic communications system. OCEANS'10 IEEE SYDNEY 2010, , , 10.1109/oceanssyd.2010.5603510.
- Dhanak, M.R., Xiros, N.I.,. Acoustic Communication; -, Eds.; Springer International Publishing: -, 2016; pp. -.
- Zheping Yan; Lu Wang; Tongda Wang; Zewen Yang; Tao Chen; Jian Xu; Polar Cooperative Navigation Algorithm for Multi-Unmanned Underwater Vehicles Considering Communication Delays. Sensors 2018, 18, 1044, 10.3390/s18041044.
- S. Giodini; B. Binnerts; Performance of acoustic communications for AUVs operating in the North Sea. OCEANS 2016 MTS/IEEE Monterey 2016, , , 10.1109/oceans.2016.7761011.
- John R. Potter; João Alves; Dale Green; Giovanni Zappa; Ivor Nissen; Kim McCoy; The JANUS underwater communications standard. 2014 Underwater Communications and Networking (UComms) 2014, , , 10.1109/ucomms.2014.7017134.
- Roberto Petroccia; João Alves; Giovanni Zappa; Fostering the use of JANUS in operationally-relevant underwater applications. 2016 IEEE Third Underwater Communications and Networking Conference (UComms) 2016, , , 10.1109/ucomms.2016.7583424.
- João Alves; Thomas Furfaro; Kevin Lepage; Andrea Munafo'; Konstantinos Pelekanakis; Roberto Petroccia; Giovanni Zappa; Moving JANUS forward: A look into the future of underwater communications interoperability. OCEANS 2016 MTS/IEEE Monterey 2016, , , 10.1109/oceans.2016.7761094.
- Roberto Petroccia; João Alves; Giovanni Zappa; JANUS-Based Services for Operationally Relevant Underwater Applications. IEEE Journal of Oceanic Engineering 2017, 42, 994-1006, 10.1109/joe.2017.2722018.
- Kim McCoy; Vladimir Djapic; Michael Ouimet; JANUS: Lingua Franca. OCEANS 2016 MTS/IEEE Monterey 2016, , , 10.1109/oceans.2016.7761459.
- T. Wiener; S. Karp; The Role of Blue/Green Laser Systems in Strategic Submarine Communications. IEEE Transactions on Communications 1980, 28, 1602-1607, 10.1109/TCOM.1980.1094858.
- Jeffery J. Puschell; Robert J. Giannaris; Larry Stotts; The Autonomous Data Optical Relay Experiment: first two way laser communication between an aircraft and submarine. [Proceedings] NTC-92: National Telesystems Conference 2003, , , 10.1109/ntc.1992.267865.
- Enqi Zhan; Hongyuan Wang; Research on Spatial Spreading Effect of Blue-Green Laser Propagation through Seawater and Atmosphere. 2009 International Conference on E-Business and Information System Security 2009, , , 10.1109/ebiss.2009.5138057.
- G. Cossu; R. Corsini; A. M. Khalid; S. Balestrino; A. Coppelli; Andrea Caiti; E. Ciaramella; Experimental demonstration of high speed underwater visible light communications. 2013 2nd International Workshop on Optical Wireless Communications (IWOW) 2013, , , 10.1109/iwow.2013.6777767.
- Zheping Yan; Zewen Yang; Lidong Yue; Lu Wang; Heming Jia; Jiajia Zhou; Discrete-time coordinated control of leader-following multiple AUVs under switching topologies and communication delays. Ocean Engineering 2019, 172, 361-372, 10.1016/j.oceaneng.2018.12.018.
- Zhang Lichuan; Feng Jingxiang; Wang Tonghao; Gao Jian; Zhang Ru; A new algorithm for collaborative navigation without time synchronization of multi-UUVS. OCEANS 2017 - Aberdeen 2017, , , 10.1109/oceanse.2017.8084717.
- Zheping Yan; Da Xu; Tao Chen; Wei Zhang; Yibo Liu; Leader-Follower Formation Control of UUVs with Model Uncertainties, Current Disturbances, and Unstable Communication. Sensors 2018, 18, 662, 10.3390/s18020662.
- Lin Zhao; Jinpeng Yu; Haisheng Yu; Distributed adaptive consensus tracking control for multiple AUVs. 2017 Seventh International Conference on Information Science and Technology (ICIST) 2017, , , 10.1109/icist.2017.7926808.
- Tan Yew Teck; Mandar Chitre; Franz S. Hover; Collaborative bathymetry-based localization of a team of autonomous underwater vehicles. 2014 IEEE International Conference on Robotics and Automation (ICRA) 2014, , , 10.1109/icra.2014.6907204.
- Yew Teck Tan; Rui Gao; Mandar Chitre; Cooperative Path Planning for Range-Only Localization Using a Single Moving Beacon. IEEE Journal of Oceanic Engineering 2014, 39, 371-385, 10.1109/joe.2013.2296361.
- Daniela De Palma; Giovanni Indiveri; Gianfranco Parlangeli; Multi-vehicle relative localization based on single range measurements. IFAC-PapersOnLine 2014, 48, 17-22, 10.1016/j.ifacol.2015.06.457.
- John G. Baylog; Thomas A. Wettergren; A ROC-Based Approach for Developing Optimal Strategies in UUV Search Planning. IEEE Journal of Oceanic Engineering 2017, 43, 843-855, 10.1109/joe.2017.2752078.
- Juan Li; Jianxin Zhang; Gengshi Zhang; Bingjian Zhang; An Adaptive Prediction Target Search Algorithm for Multi-AUVs in an Unknown 3D Environment. Sensors 2018, 18, 3853, 10.3390/s18113853.
- Shipeng Lv; Yakun Zhu; A Multi-AUV Searching Algorithm Based on Neuron Network with Obstacle. 2019 3rd International Symposium on Autonomous Systems (ISAS) 2019, , , 10.1109/isass.2019.8757793.
- Bing Sun; Daqi Zhu; Chen Tian; Chaomin Luo; Complete Coverage Autonomous Underwater Vehicles Path Planning Based on Glasius Bio-Inspired Neural Network Algorithm for Discrete and Centralized Programming. IEEE Transactions on Cognitive and Developmental Systems 2018, 11, 73-84, 10.1109/tcds.2018.2810235.
- Narcís Palomeras; Antonio Peñalver; Miquel Massot-Campos; Pep Lluís Negre; José Javier Fernández; Pere Ridao; Pedro J Sanz; G. Oliver; I-AUV Docking and Panel Intervention at Sea. Sensors 2016, 16, 1673, 10.3390/s16101673.
- David Ribas; Pere Ridao; Alessio Turetta; Claudio Melchiorri; Gianluca Palli; José Javier Fernández; Pedro J Sanz; Pere Ridao; I-AUV Mechatronics Integration for the TRIDENT FP7 Project. IEEE/ASME Transactions on Mechatronics 2015, 20, 2583-2592, 10.1109/tmech.2015.2395413.
- Giuseppe Casalino; Massimo Caccia; Stefano Caselli; Claudio Melchiorri; Gianluca Antonelli; Andrea Caiti; Giovanni Indiveri; Giorgio Cannata; Enrico Simetti; Sandro Torelli; et al. Underwater Intervention Robotics: An Outline of the Italian National Project MARIS. Marine Technology Society Journal 2016, 50, 98-107, 10.4031/mtsj.50.4.7.
- Enrico Simetti; Giuseppe Casalino; Ninad Manerikar; Alessandro Sperindé; Sandro Torelli; Francesco Wanderlingh; Cooperation between autonomous underwater vehicle manipulations systems with minimal information exchange. OCEANS 2015 - Genova 2015, , , 10.1109/oceans-genova.2015.7271700.
- Enrico Simetti; Giuseppe Casalino; Manipulation and Transportation With Cooperative Underwater Vehicle Manipulator Systems. IEEE Journal of Oceanic Engineering 2016, 42, 782-799, 10.1109/JOE.2016.2618182.
- Roberto Conti; Enrico Meli; Alessandro Ridolfi; Benedetto Allotta; An innovative decentralized strategy for I-AUVs cooperative manipulation tasks. Robotics and Autonomous Systems 2015, 72, 261-276, 10.1016/j.robot.2015.06.006.
- Elisabetta Cataldi; Stefano Chiaverini; Gianluca Antonelli; Cooperative Object Transportation by Two Underwater Vehicle-Manipulator Systems. 2018 26th Mediterranean Conference on Control and Automation (MED) 2018, , , 10.1109/med.2018.8442760.
- Shahab Heshmati-Alamdari; George C. Karras; Kostas J. Kyriakopoulos; A Distributed Predictive Control Approach for Cooperative Manipulation of Multiple Underwater Vehicle Manipulator Systems. 2019 International Conference on Robotics and Automation (ICRA) 2019, , , 10.1109/icra.2019.8793476.
- Mario Prats; Javier Pérez; J. Javier Fernández; Pedro J Sanz; An open source tool for simulation and supervision of underwater intervention missions. 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems 2012, , , 10.1109/iros.2012.6385788.
- Rodrigo Hernández-Alvarado; Luis Govinda García-Valdovinos; Tomás Salgado-Jiménez; Alfonso Gómez-Espinosa; Fernando Fonseca-Navarro; Neural Network-Based Self-Tuning PID Control for Underwater Vehicles. Sensors 2016, 16, 1429, 10.3390/s16091429.
- Luis Govinda García-Valdovinos; Fernando Fonseca-Navarro; Joanes Aizpuru; Tomás Salgado-Jiménez; Alfonso Gómez-Espinosa; José Antonio Cruz-Ledesma; Neuro-Sliding Control for Underwater ROV's Subject to Unknown Disturbances.. Sensors 2019, 19, 2943, 10.3390/s19132943.