Compared to the BeiDou regional navigation satellite system (BDS-2), the BeiDou global navigation satellite system (BDS-3) carried out a brand new integrity concept design and construction work, which defines and achieves the integrity functions for major civil open services (OS) signals such as B1C, B2a, and B1I. The integrity definition and calculation method of BDS-3 are introduced. The fault tree model for satellite signal-in-space (SIS) is used, to decompose and obtain the integrity risk bottom events. In response to the weakness in the space and ground segments of the system, a variety of integrity monitoring measures have been taken. On this basis, the design values for the new B1C/B2a signal and the original B1I signal are proposed, which are 0.9 × 10−5 and 0.8 × 10−5, respectively. The hybrid alarming mechanism of BDS-3, which has both the ground alarming approach and the satellite alarming approach, is explained. At last, an integrity risk analysis and verification work were carried out using the operating data of the system in 2019. The results show that the actual operation of the system is consistent with the conceptual design, which satisfies the integrity performance promised by BDS-3 in the ICAO SAPRs.
- BDS
- BeiDou
- integrity
- risk tree
- FMEA
- satellite service failure
- constellation service failure
1. Introduction
Accuracy, integrity, continuity, and availability are the four core performance indicators of satellite navigation systems. Among them, integrity refers to the ability of the system to alert users in time when the service is abnormal or experiences failure, and it characterizes the security and reliability of system services [1][2]. If there is an abnormality or failure in the service, but the system fails to detect it or fails to alarm in time, an “integrity event” has occurred. Once an integrity event occurs, it will have a security impact on the user, especially for civil aviation, maritime, railway, and other users related to life safety. System reliability is even more strategically important with the widespread use of low-cost sensors for various applications including personal positioning and autonomous navigation [3][4]. In addition, the integrity of the core constellation is also an important foundation for the construction of the satellite-based augmentation systems (SBAS) such as WASS (wide area augmentation system)[5][6], ENGOS (European geostationary navigation overlay system)[7][8], MSAS (multi-functional satellite augmentation system)[9][10] , BDSBAS (BeiDou satellite-based augmentation system)[11], and airport ground-based augmentation systems (GBAS). These augmentation systems are constructed to further augment the global navigation satellite system (GNSS) constellation and provide higher integrity navigation services.
Satellite navigation systems in the world are paying more and more attention to the construction and improvement of their integrity capabilities. GPS and Galileo considered their integrity function at the beginning of the system design, defined the integrity parameters and algorithms, and planned its application scenarios [2][12][13][14]. China’s BeiDou also attaches importance to the construction of integrity. China’s BeiDou global navigation satellite system (BDS-3) carried out a brand new integrity concept design work, which defines and achieves the integrity functions for major civil open service (OS) signals such as B1C, B2a, and B1I. In addition to GNSSs, regional satellite navigation systems have also begun to upgrade their integrity capabilities. For example, Japan’s QZSS not only defines and provides the integrity function for its basic positioning, navigation, and timing (PNT) service, but also for its sub-meter level augmentation service (SLAS) and centimeter-level augmentation service (CLAS) [15][16].
Due to the numerous components, functions, and processing operations of the system, it is not easy to ensure the integrity of satellite navigation systems, especially for global ones. On 13 July 2019, a mass outage occurred in Galileo—all 24 networking satellites in orbit entered an “unavailable” or “test” state, and the system was immediately paralyzed. After 48 h of full maintenance, the system did not return to normal until 8 o’clock on 18 July. During this period, the service was knocked offline for up to 117 h (about 5 days)[17]. Although the European GNSS Agency (GSA) issued a warning of service outage on the Galileo official website at 20:00 on 13 July[18], it still had a serious impact on users around the world. This incident also prompted countries to take measures to ensure the safe operations of satellite navigation systems. After this incident, Russia stated that it has set up a multi-level software detection system in the ground segment of GLONASS, with a redundant design and an autonomous control function to prevent such failures from occurring.
On 27 December 2018, BDS-3 completed the construction of the basic constellation (consisting of 18 MEOs) and began to provide the initial global service [19]. On 31 July 2020, BDS-3 completed all construction (consisting of 24 MEOs, 3 IGSOs, and 3 GEOs) tasks and officially opened the global service[20]. Since the initial service was provided, BDS-3 has been in a stable operation state, and there have been no integrity events affecting the system and user services. This benefits from the reasonable system design and effective risk monitoring and control measures. However, this does not mean that BDS-3 has completely eliminated the integrity hazards, especially considering that the system was built in such a short period of time (2012–2020). To ensure the safety and reliability of the service, it is necessary and valuable to carry out more in-depth research and evaluation.
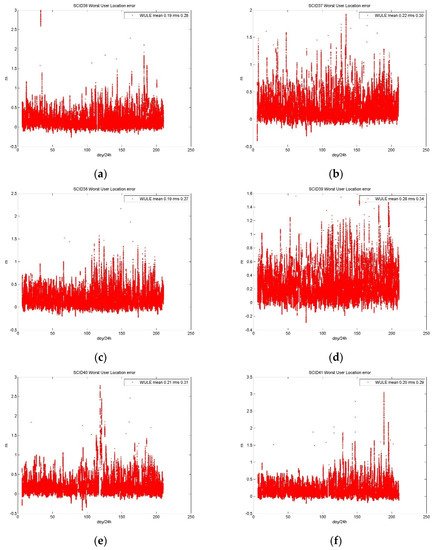
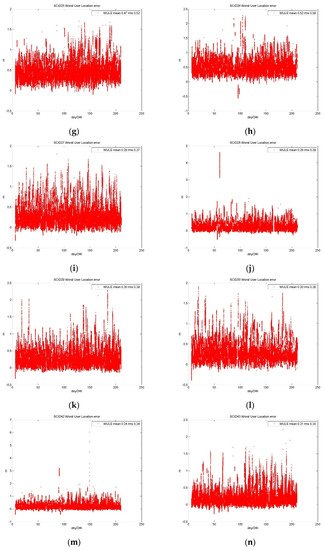
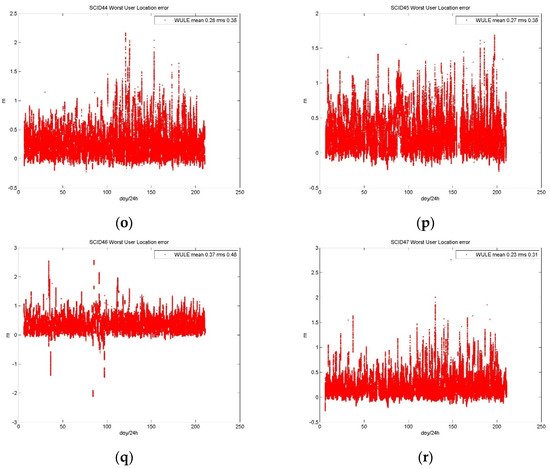
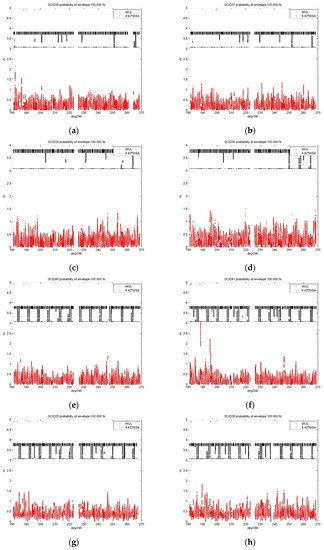
This study focuses on the design and the performance analysis of BDS-3’s integrity concept. In order to improve the reliability and safety of the service, BDS-3 upgraded and improved the conceptual design and function of integrity compared to BDS-2 and carried out standard development work in ICAO SARPs at the same time. The satellite service failure and constellation service failure concepts are clearly defined, and the integrity risk probability calculation method is designed for the three OS signals of B1I/B1C/B2a. The integrity fault tree model is studied and established, and the corresponding monitoring measures for weakness in the space segment and the ground segment of the system is proposed. In terms of alarms, BDS-3 is designed with a hybrid alarm mechanism of the ground alarm approach and the satellite alarm approach, to make up for the limitations for BDS’s failure to deploy ground monitoring stations globally. Finally, the actual operation data of 2019 was used to verify the integrity performance of the system service. The results show that the actual operation of the system is consistent with the conceptual design, which proves the safety and reliability of the BDS-3 OS service.
The remainder of this paper is structured as follows. Section 2 defines the integrity of the BDS OS signals (B1I/B1C/B2a), introduces the alarm approach, and gives the calculation method of the satellite service failure probability (Psat) and the constellation service failure probability (Pconst). In Section 3, a fault tree model for the BDS satellite signal-in-space (SIS) is established, the bottom events from the space segment and the ground segment are decomposed, and the system design values of Psat and Pconst are derived. In Section 4, the integrity prevention and control measures taken by BDS-3 in the space segment and the ground segment are introduced, respectively. Finally, Section 5 presents the integrity risk verification work on BDS-3 and the analyses of the results.
2. Results and Discussion
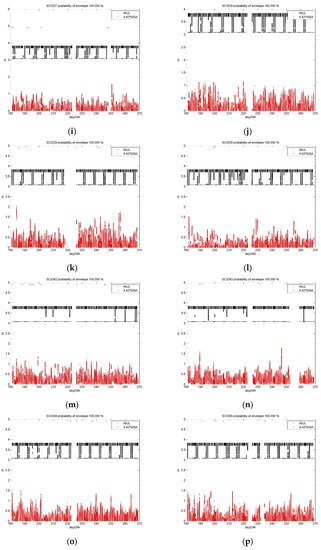
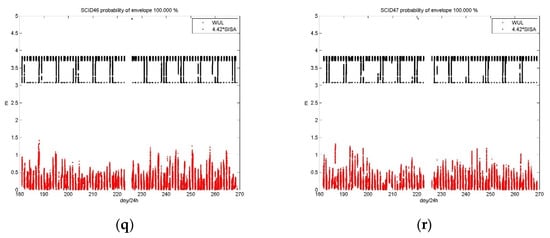
2.1. Test Results for B1I Signal
2.2. Test Results for B1C and B2a Signals
3. Conclusions
This entry is adapted from the peer-reviewed paper 10.3390/rs13152860
References
- Blomenhofer, H.; Ehret, W.; Blomenhofer, E. Performance Analysis of GNSS Global and Regional Integrity Concepts. In Proceedings of the ION GPS/GNSS 2003, Portland, OR, USA, 9–12 September 2003; pp. 991–1001. [Google Scholar]
- Hernández, C.; Catalán, C.; Martínez, M.A. Galileo Integrity Concept and its Applications to the Maritime Sector. Int. J. Mar. Navig. Saf. Sea Transp. 2009, 3, 287–291. [Google Scholar]
- Robustelli, U.; Baiocchi, V.; Pugliano, G. Assessment of Dual Frequency GNSS Observations from a Xiaomi Mi 8 Android Smartphone and Positioning Performance Analysis. Electronics 2019, 8, 91. [Google Scholar] [CrossRef]
- Jiménez-Martínez, M.J.; Farjas-Abadia, M.; Quesada-Olmo, N. An Approach to Improving GNSS Positioning Accuracy Using Several GNSS Devices. Remote Sens. 2021, 13, 1149. [Google Scholar] [CrossRef]
- GPS. WAAS, Resiliency and Outreach. Available online: https://www.gps.gov/multimedia/presentations/2018/10/APEC/alexander-2.pdf (accessed on 15 June 2021).
- ICAO. WAAS Development Changes since Commissioning. Available online: https://www.icao.int/APAC/APAC-RSO/GBASSBAS%20Implementation%20Workshop/1-4_WAAS_Development_Changes_Since_Commissioning_final%20(T%20Schemmp).pdf (accessed on 15 June 2021).
- ICAO. EGNOS Status 3 June 2019. Available online: https://www.icao.int/APAC/APAC-RSO/GBASSBAS%20Implementation%20Workshop/1-5_EGNOS%20Status_final%20(G%20COMELLI).pdf (accessed on 15 June 2021).
- ICAO. EGNOS Status and Plans. Available online: https://www.icao.int/MID/Documents/2016/ACAC-ICAO%20GNSS/EC%20Rabat%20EGNOS%20status%20and%20plans_final.pdf#search=EGNOS (accessed on 15 June 2021).
- Sakai, T.; Tashiro, H. MSAS Status. In Proceedings of the ION GNSS+ 2013, Nashville, TN, USA, 16–17 September 2013; pp. 2343–2360. [Google Scholar]
- ICAO. MSAS System Development. Available online: https://www.icao.int/APAC/APAC-RSO/GBASSBAS%20Implementation%20Workshop/1-6_MSAS%20System%20Development_Rev2%20(S%20Saito).pdf (accessed on 15 June 2021).
- Liu, C.; Gao, W.; Shao, B.; Lu, J.; Wang, W.; Chen, Y.; Su, C.; Xiong, S.; Ding, Q. Development of BeiDou Satellite-Based Augmentation System. Navigation 2021, 68, 405–417. [Google Scholar] [CrossRef]
- Medel, C.H.; Catalán, C.C.; Vidou, M.A.F.; Pérez, E.S. The Galileo Ground Segment Integrity Algorithms: Design and Performance. Int. J. Navig. Obs. 2008, 1–16. [Google Scholar] [CrossRef]
- Blomenhofer, H.; Ehret, W.; Leonard, A.; Blomenhofer, E. GNSS/Galileo Global and Regional Integrity Performance Analysis. In Proceedings of the ION GNSS 2004, Long Beach, CA, USA, 21–24 September 2004; pp. 2158–2168. [Google Scholar]
- Werner, W.; Zink, T.; Lohnert, E.; Pielmeier, J. GALILEO Integrity Performance Assessment (GIPA). In Proceedings of the ION GPS 2001, Salt Lake City, UT, USA, 11–14 September 2001; pp. 1838–1849. [Google Scholar]
- Cabinet Office. Quasi-Zenith Satellite System Performance Standard (PS-QZSS-001). Available online: https://qzss.go.jp/en/technical/download/pdf/ps-is-qzss/ps-qzss-001.pdf (accessed on 15 June 2021).
- Cabinet Office. Quasi-Zenith Satellite System Interface Specification Centimeter Level Augmentation Service (IS-QZSS-L6-001). Available online: https://qzss.go.jp/en/technical/download/pdf/ps-is-qzss/is-qzss-l6-001.pdf (accessed on 15 June 2021).
- GPS. Galileo and Its Outage in July 2019 from the IGS-MGEX Perspective. Available online: https://www.gps.gov/governance/advisory/meetings/2019-11/beutler.pdf (accessed on 15 June 2021).
- GSA. Update on the Availability of Some Galileo Initial Services. Available online: https://www.gsc-europa.eu/news/update-on-the-availability-of-some-galileo-initial-services (accessed on 15 June 2021).
- CSNO. The Application Service Architecture of BeiDou Navigation Satellite System (Version 1.0). Available online: http://en.beidou.gov.cn/SYSTEMS/Officialdocument/201812/P020181227424526837905.pdf (accessed on 15 June 2021).
- Xinhua Net. Update: Xi Officially Announces Commissioning of BDS-3 Navigation System. Available online: http://www.xinhuanet.com/english/2020-07/31/c_139255481.htm (accessed on 15 June 2021).