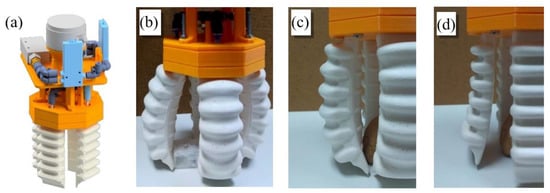
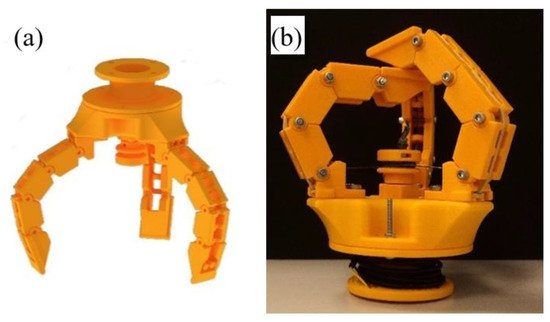
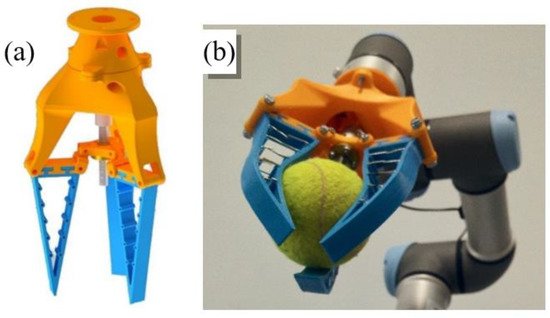
Nevertheless, for the reproduction of this prototype, this feature has been obviated to focus attention on the design of the fingers: passive structures capable of adapting to the objects that deform them. This gripping tool comprises three fingers of a flexible material. The fingers are triangular with thin walls and, longitudinally, they present a nucleus formed by rigid parts that prevent the walls of the finger from approaching. With this morphology, the tip remains approximately in the same place when trying to deform the finger, but the body bends around the object. This deformation of the finger allows it to adapt to the shape of the surface of the object with which it will make contact, and, thanks to its flexibility, it will deform before damaging it. In this case, the choice of the number of fingers that form the gripper could have been two, three, or four. The number three has been selected because the spindle mechanism makes the movement perfectly synchronized, and it is unnecessary to complicate the design by adding a fourth finger, although in some scenarios, it might be useful to have it.
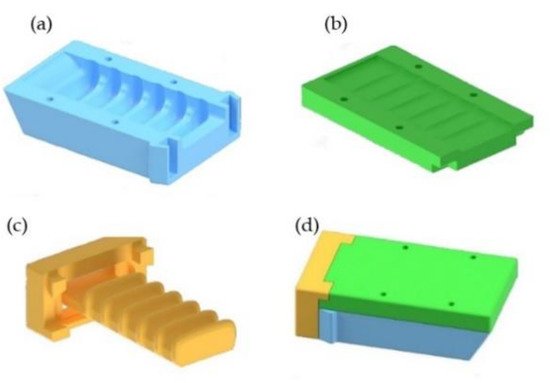
The gripping tool consists of three flexible fingers and a rigid base. The fingers are made from the elastomeric thermoplastic produced by the company Recreus [
46] called FilaFlex, and they measure 11 cm in length and 1.5 cm in width. The base is formed by two pieces: the main one on which the fingers are mounted and to which the motor is coupled, and a secondary one that serves to join the gripping tool with the UR3. Furthermore, the mechanical actuation is composed of a direct current motor, a coupler flexible, a spindle and a nut, and a handle to which the nut, the finger connector as well as the motor support are attached.
To generate the grip movement, each finger can be held with rotational joints at both ends of its base. By maintaining the position of the outer ends of the finger bases and changing the height of the inner ends, the opening and closing movement of the hand is achieved. This movement, which can be generated in many ways, is done with a spindle nut mechanism. A motor rotates the spindle, which causes the nut to move up and down when its rotation is prevented. The inner ends of the fingers are connected to the nut by connectors, which allow the possibility of movement while preventing the rotation of the nut.
The rigid sections that form the internal structure of the finger have been made with a wire. This wire has enough rigidity to allow the deformation of the finger but at the same time allow it to return to its initial position.
3. Experiments
Preparation of the Experiments
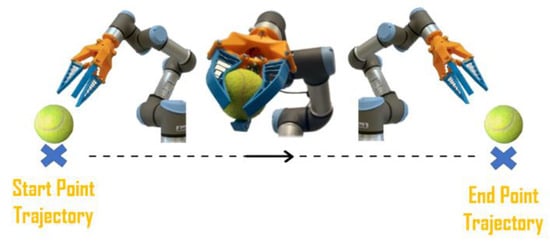
The objective of this work is to test the robustness of the gripping tools and their grasp stability. To test these parameters, an experiment has been designed in which the ability of the gripper to grip a certain object, to hold it while the robotic arm realizes a trajectory, and successively release it, is evaluated (as illustrated in ). The test is deemed successful if the object does not fall either during the grip or the displacement and if the object is not damaged after gripping action.
Figure 8. Test execution: the gripper picks up one of the twelve objects in a predetermined position and place it in the desired location.
Since one of the most important aspects is the capability of grippers to manipulate objects with different characteristics, i.e., different shape, rigidity, and fragility, twelve objects, as shown in , have been chosen for experimentation. Each of them presents different characteristics to represent a wider range of objects. The weight and dimensions of objects are limited by the capacity and dimensions of the grippers.
Figure 9. Selection of objects for experimentation with its identification number. (a) Tennis ball #1, (b) Screen Cleaner #2, (c) Vaseline Container #3, (d) Metallic Container #4, (e) Nut #5, (f) Rock #6, (g) Tomato #7, (h) Egg #8, (i) Glue Stick #9, (l) Dish Sponge #10, (m) Broccoli #11, and (n) Candy Box #12.
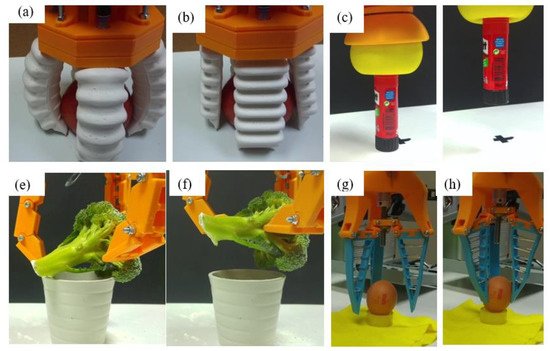
Objects are oriented in different ways to not facilitate any gripper. For example, object #9 (see ) is arranged vertically, whereas object #12 is arranged horizontally. In some cases, external elements have been used to ensure the correct positioning of the object, such as for the egg (#8) (as can be seen in or for the tennis ball (#1), which would have slipped once placed on the surface due to their physical characteristics.
Figure 10. Test execution with Gripper 1 (a,b), Gripper 2 (c,d), Gripper 3 (e,f), Gripper 4 (g,h).
Table 1. Selection of objects for experimentation. Each object has been assigned a number to facilitate the subsequent display of results (first column). The “Dimensions” column shows the significant dimensions of each object, and the “Weight” column shows the weight of the objects used in the experiments. In the last column “Relevant Aspects”, the aspects that differentiate each object from the others are highlighted.
| ID |
Object |
Dimensions |
Weight |
Relevant Aspects |
| 1 |
Tennis ball |
70 mm diameter |
57.6 g |
Quite rigid and with a rough surface |
| 2 |
Screen Cleaner |
80 mm diameter
30 mm thickness |
12.8 g |
Considerably soft and deformable |
| 3 |
Vaseline container |
80 mm diameter
50 mm height |
147 g |
Very smooth surface |
| 4 |
Metallic container |
85 × 50 × 30 mm |
47.9 g |
Prismatic form with some irregularities, smooth surface |
| 5 |
Nut |
35 mm diameter
45 mm height |
14.4 g |
Very small and lightweight |
| 6 |
Rock |
25 × 15 × 10 mm |
12.9 g |
The smallest object of the experiment |
| 7 |
Tomato |
90 mm diameter
70 mm height |
229.6 g |
The heaviest object of the experiment |
| 8 |
Egg |
50 mm diameter
65 mm height |
71 g |
Hard but very fragile |
| 9 |
Glue stick |
25 mm diameter
100 mm height |
19.6 g |
Svelte with irregularities at the ends |
| 10 |
Dish sponge |
105 × 80 × 25 mm |
10.2 g |
Considerably soft and deformable with a slightly stiffer surface |
| 11 |
Broccoli |
90 mm diameter
120 mm height |
130.4 g |
Irregular object that should not be deformed |
| 12 |
Candy box |
60 × 35 × 15 mm |
7.9 g |
Little gripping surface |
In the following table, an identification number is assigned to each object to simplify the result tables.
The experiment has been carried out in three different environments: normal, humid, and dusty. The normal environment is achieved without changing the properties of the environment. In this case, objects are not damp or dusty.
The humid environment consists in moistening both the gripping tool and the object. The presence of humidity causes greater effects on some objects than on others, depending on the surface of the object and how much the water can wet it. For instance, while a plastic container with smooth walls may only slightly be affected by a humid environment, properties of a sponge, such as its weight and surface adhesion, greatly change in such an environment. Finally, the dusty environment is simulated by spreading a generous amount of flour both by the tool and by the object. The last two situations can occur in agriculture or in specific industrial processes.
For each experiment, 20 repetitions have been performed. This means that for each object, 60 repetitions have been performed with each tool and twenty have been performed for each environment, which are 240 for each gripper and object. Being twelve objects, a total of 2880 repetitions are performed. In , it is possible to see some captions of these experiments.
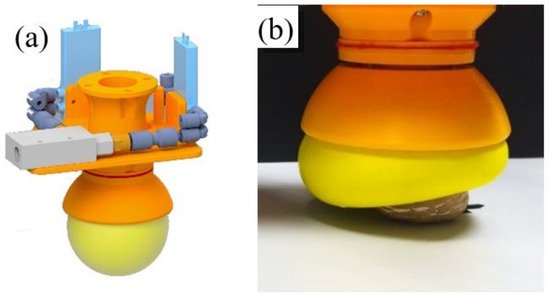
The time used for successful gripping is different for each of the grippers. In the case of Gripper 1, this time is in the range of 1–2 s, since the fingers must be inflated to a greater or lesser extent according to the object’s size. In the case of Gripper 2, this time is about 3 s, since it is necessary that the gripper first adjusts to the shape of the object to subsequently perform the vacuum. In the case of Gripper 3 and Gripper 4, this time is less than or equal to one second.