Agricultural robotics aims to overcome the challenges imposed by population growth, accelerated urbanization, high competitiveness of high-quality products, environmental preservation and a lack of qualified labor. The main existing applications of agricultural robotic systems are for the execution of land preparation before planting, sowing, planting, plant treatment, harvesting, yield estimation and phenotyping.
- agricultural robots
- agriculture 4.0
- precision agriculture
1. Introduction
Fortunately, to overcome the challenges imposed by population growth, accelerated urbanization, high competitiveness of high-quality products, lack of qualified labor and the vulnerability of human labor to situations of health risk, scientific advances in different areas of human knowledge are transforming the way of managing agricultural activities, increasingly reducing human intervention. According to [1], the term Precision Agriculture (PA) can be defined as “that kind of agriculture that increases the number of (correct) decisions per unit area of land per unit time with associated net benefits”. This definition is more generic so that decision-making can be done either by electronic devices or humans. On the other hand, in [2] the PA is described as being “a management strategy that uses electronic information and other technologies to gather, process, and analyze spatial and temporal data for the purpose of guiding targeted actions that improve efficiency, productivity, and sustainability of agricultural operations”. This definition clearly describes the use of technologies as a means of improving agricultural operations. In this review work, these technologies were grouped into three main areas: robotics, Artificial Intelligence (AI) and Internet of Things (IoT). These technologies can be used either alone, or together, according to Figure 1.
Figure 1. Technological areas associated with Precision Agriculture (PA).
PA has gained prominence with the use of robotic systems and electronic devices in agricultural tasks such as: land preparation, sowing, planting, pest control and harvesting [3]. The market value of Precision Agriculture in 2016 was estimated at $3.67 billion and is estimated to be growing at a rate of 14.7%, to reach $7.29 billion by 2021 [4].
As seen in Figure 1, although this review will address the use of robots in agriculture, often the technological areas of AI and IoT are part of the subsystems of an application involving the use of robots for the execution of agricultural activities. According to Zha, who conducted a review of the use of AI in agriculture, AI can be used in soil management, weed management and in cooperation with IoT technologies [5]. He describes that computer vision algorithms, such as Deep Belief Networks (DBN) and Convolution Neural Network (CNN), have promising results in fruit classification and weed detection in complex environments, that is, with varying ambient lighting, the complexities in the background, the angle when capturing and the variation of the shapes and colors of the fruits/weeds. Elijah et al. carried out a review work on the benefits of using IoT and data analytics in agriculture [6]. According to them, IoT technologies make it possible to monitor farms through sensors of different types, such as optical, mechanical, electrochemical, dielectric soil moisture and location. Due to the existence of short/long-range communication technologies, these sensors work as a data source for prediction, storage management, decision, farm management and precise application algorithms. The advantages of using IoT in agriculture include: safety control and fraud prevention, competitive advantages, wealth creation and distributions, cost reduction and wastage, operational efficiency, awareness and asset management. As open challenges, the authors highlight the need for technological innovations, realization of applications in real large-scale scenarios (pilot project) and cost reduction, standardization and regulation of IoT technologies that facilitate their use in agriculture. Another review work on IoT-based smart agriculture, which also describes the use of several electronic sensors in the improvement of agricultural control and monitoring tasks, is described in [7]. One aspect in common between the survey works mentioned above is that all report the use of robots as tools of technological improvement of agricultural activities. The performance of robots in agriculture depends not only on the type of crop, but also on the type of task that the robot is intended to perform. In this sense, there are review works that address the use of robots in agriculture to perform general tasks, as in [8][9][10], or to improve the performance of specific tasks, such as harvesting high-value crops [11] and solving wheeled mobile robots’ navigation problems [12].
Bac et al. analyzed harvesting robots in the period between 1984 and 2014 [11], Oliveira et al. studied about 21 robots [8] and Fountas et al. carried out a systematic review on various agricultural tasks [9].
2. Robotic Applications in Agriculture
2.1. Robotic Applications in Agriculture for Land Preparation before Planting
Preparing the land before planting is one of the first agricultural tasks to be carried out, such as plowing the land and applying fertilizers. The practice of plowing the land (inversion of soil layers) allows a greater introduction of oxygen and expulsion of carbon dioxide; however, depending on the local climate conditions, it can harm future crops by considerably reducing the soil’s carbon stocks. On the other hand, soil fertilization serves to replace the nutrients necessary for the development of crops. The review article [13], published in 1987, refers that one of the main challenges in the development of robots that operate in rough terrain, as in a plowed field, is the creation of a robotic system that is precisely controlled. To create a robot capable of assisting rural workers not only in soil fertilization but also for pest control, soil management, harvesting and transportation, the German company Raussendorf developed, in 2014, the robot entitled Cäsar, as shown in Figure 2a. The commercially available Cäsar robot [14] can fertilize the soil in two ways: via remote control or autonomously. To perform tasks automatically, it uses Real-Time Kinematic (RTK) technology for the Global Navigation Satellite System (GNSS) (GNSS is the navigation device, however, it can use different services, such as Global Positioning Systems (GPS) (North American), GLONASS (Russian) or GALILEO (European) [15][16]), resulting in a location accuracy of up to 3 cm. Designed to work on the farm together with human workers, the Cäsar robot has a collision detection system based on ultrasonic sensors that guarantee its immediate stop, with a maximum detection distance of 5 m.

Figure 2. Examples of robots used in agriculture for land preparation before planting.
2.2. Robotic Applications in Agriculture for Sowing and Planting
Traditionally, sowing and planting tasks are performed by specialized planting equipment connected behind the tractor. However, tractors are characterized by being heavy machinery and, therefore, their constant locomotion throughout the farm intensifies soil compaction. The soil compaction activity has several damaging effects for the agricultural environments, such as increasing the apparent density and soil resistance, reducing porosity, the rate of water infiltration and aeration, in addition to affecting the chemical properties and biogeochemical cycles, affecting the development of plants and soil biodiversity [17]. In 1996, Sakaue was already developing robotic systems to automate the sowing and planting process in Japan [18], with the elaboration of four variations of a wheeled robot. Despite having a rudimentary structure, prototype number four was capable of planting cabbage, lettuce, broccoli, cauliflower or celery of up to 2200 plants/h. However, the system was not able to move autonomously.
Motivated to produce a small, high precision and capable of agile and easily moving along Chinese wheat farms, Haibo et al. developed the Lumai-5 robot, as shown in Figure 3a. For this type of task, the robot must ensure that the sowing process remains constant, even for different speeds of detachment. The Lumai-5 robot has a 4WS, a closed-loop control system and speed, angle and pressure sensors to accurately carry out wheat sowing. The size of the planting tray, the vacuum chamber pressure and the planting speed were the main factors that directly affected the seeding quality [19].
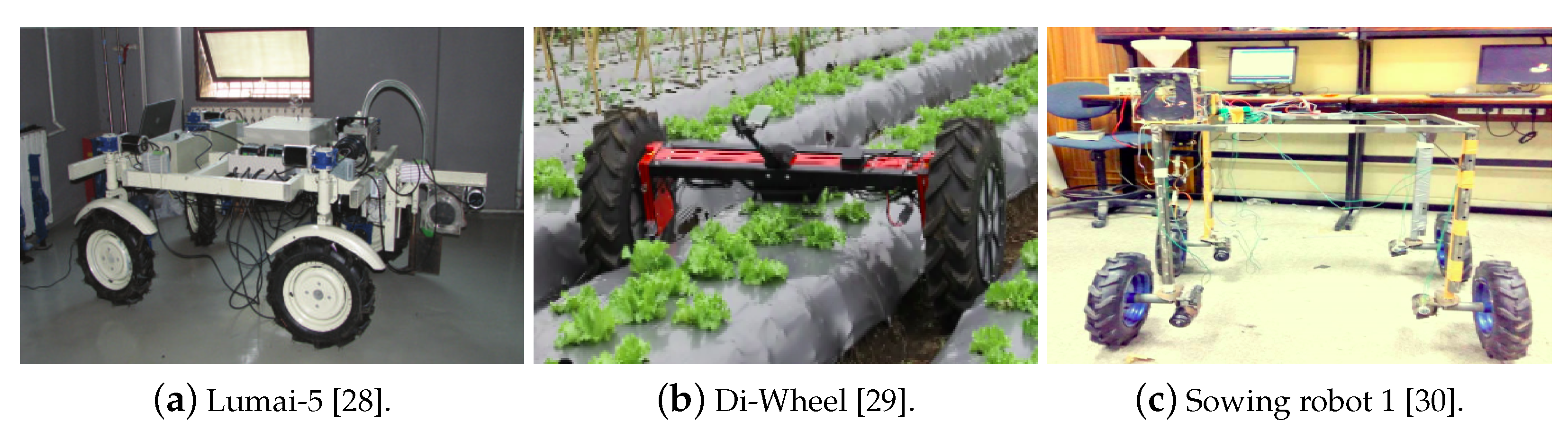
Figure 3. Examples of robots used in agriculture for sowing and planting.
2.3. Robotic Applications in Agriculture for Plant Treatment
After finishing the sowing stage, maintaining the planting growth properly, that is, free of diseases and pests, requires constant monitoring by the farmer. According to FAO data, about 20 to 40% of world crop production is lost due to pests and diseases [20]. The good growth of crops invaded by weeds is strongly compromised and can even destroy crops completely. Weeds can also attract pests in addition to small animals like snakes and mice. Thus, the sooner it is extracted, the lower the financial losses. As an example of these costs, in Australia weed management costs are close to $4 billion a year [21]. Plant treatment is commonly done by applying herbicides and pesticides (insecticides and fungicides). The searches for the automation of the diseases’ identification process in plants and detection of weeds are not recent—there have already been works in this area since 1998. In [22] a robotic weed control system for tomatoes is described, based on the Bayesian classifier algorithm, that correctly identified 73.1% of tomatoes and 68.8% of weeds in the validation set of field images. In [23], researchers Lee and Slaughter chose to develop the hardware-based neural network, rather than the Bayesian classifier, for increasing the plant identification. With this new classification method, the robotic system correctly identified 38.9% of tomato cotyledons and 85.7% of weeds. These were just the first robotic systems applied to weed control, from a series of robots that have been developed over the years. Therefore, this subsection will address several works related to these agricultural tasks, focusing on its latest developments.
Using a 6 Degrees of Freedom (DoF) manipulator arm, an RGB camera and a laser distance sensor (DT35, SICK), all mounted on a fixed platform, Schor et al. developed a robotic system to perform the detection of powdery mildew and tomato spotted wilt virus diseases in greenhouses. The RGB camera and the laser sensor were placed on the final actuator of the manipulator (shown in Figure 4a) to extract the images from different angles and avoid collisions with the plant. The images were used in the disease detection process, using Principal Component Analysis (PCA) and Coefficient of Variation (CV). The system obtained an accuracy rate of 64% for the process of classification of plants with powdery mildew disease in an early stage of evolution and up to 90% for the case of tomato spotted wilt virus, thus enabling accurate detection of diseases in its initial stage [24]. For the same purpose, the mobile robot eAGROBOT (depicted in Figure 4b) was used to identify pests in cotton and groundnut crops. Through the application of artificial intelligence algorithms, such as artificial neural networks and K-means, in the images acquired by an RGB camera of crops in the initial sowing stage (period of the emergence of diseases such as leaf spot and anthracnose), the robot achieved a precision of 83–96% for disease identification in normal images and 89% for wide images [25].
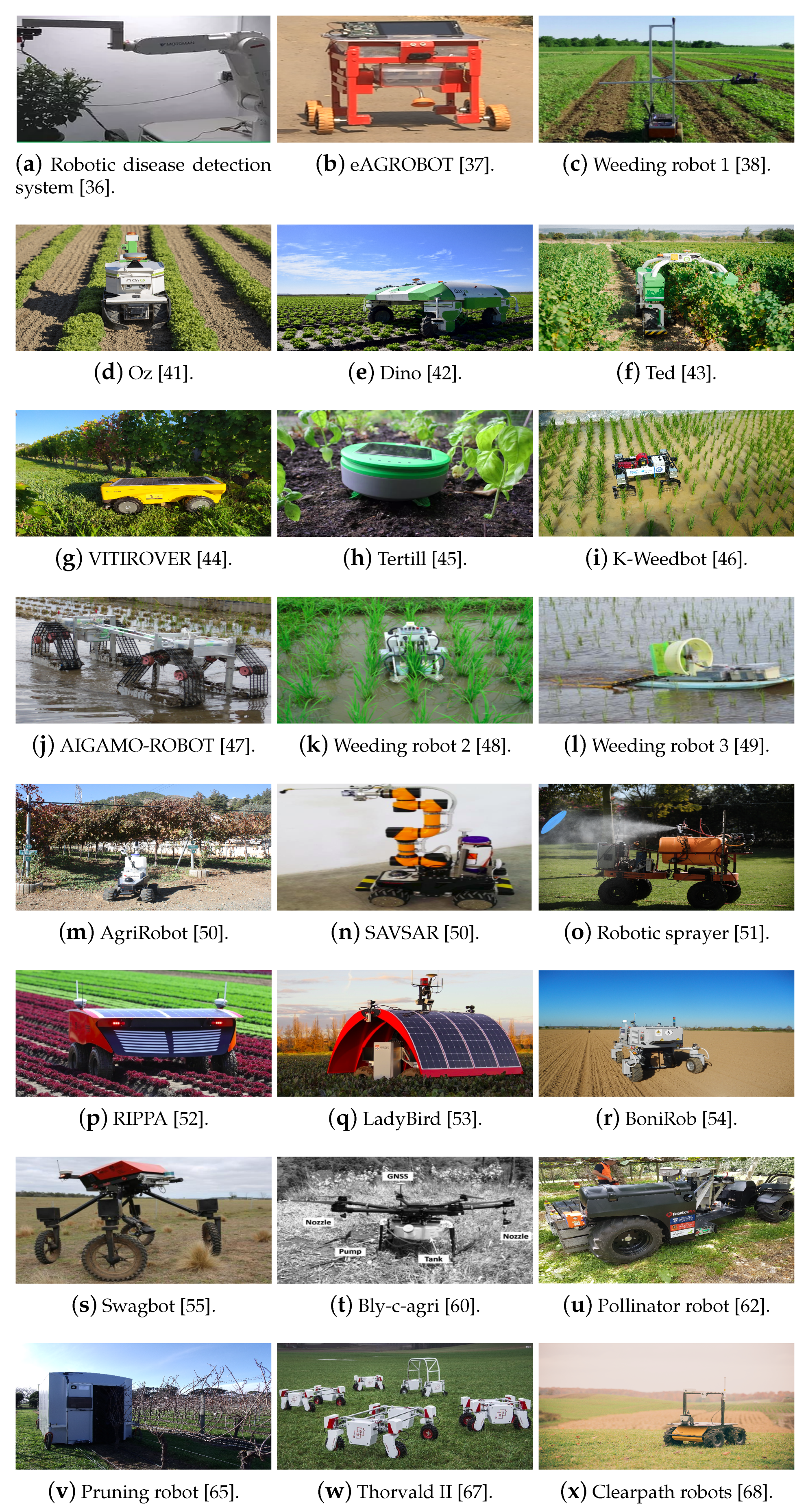
Figure 4. Examples of robots used in agriculture for plant treatment.
2.4. Robotic Applications in Agriculture for Harvesting
In addition to being a repetitive task and requiring agile execution, the harvesting activity requires a lot of effort from the harvester. According to Hayashi et al., harvesting operations represent around 25% of all hours of agricultural work in Japan [26]. Concerning financial costs (an important decision factor in farmers’ decision-making), in 2014, in Australia, labor rent represented between 20% and 30% of total cash costs [27] and in China, in 2019, it represented more than 75% of production costs and increasing annually [28]. This difference in values, between Australia and China, is due to the higher level of automation of the tasks of Australian crops. In this way, several works (see Figure 5) are being carried out proposing the use of robotic systems to perform agricultural harvesting activities. Several scientific articles address different image processing techniques in different types of cultures. In [29] during the design and implementation of an aided fruit-harvesting robot, Ceres et al. found that the main difficulties in the development of these types of systems were: driving the robot through the field from tree to tree and from tree row to tree row; detection and localization of fruits; and grasping and detaching of selected targets. Another relevant work carried out in the 1990s was the autonomous mobile robot AURORA for greenhouse operation, capable of autonomously navigating the greenhouse corridors using only the information provided by ultrasonic sensors [30]. The robot was built to be a multitasking platform, to perform tasks such as: harvesting, transportation of fruits and plan inspection. In this case, the project requirements were: navigation in unaltered greenhouses, low cost, flexibility, multi-functionality, supervizable autonomous operation and friendly user interface. In their work, Bac et al. analyzed about 50 applications of robots from different regions of the world in carrying out agricultural harvesting activities [11]. However, despite all the reviewed works proposing the use of robots to carry out harvesting activities, only the task of capturing fruits showed an improvement trend, when compared to the works done in the period between 1984 and 2014. In other activities, the evaluated robots have not yet performed well enough to replace a human harvester [11].
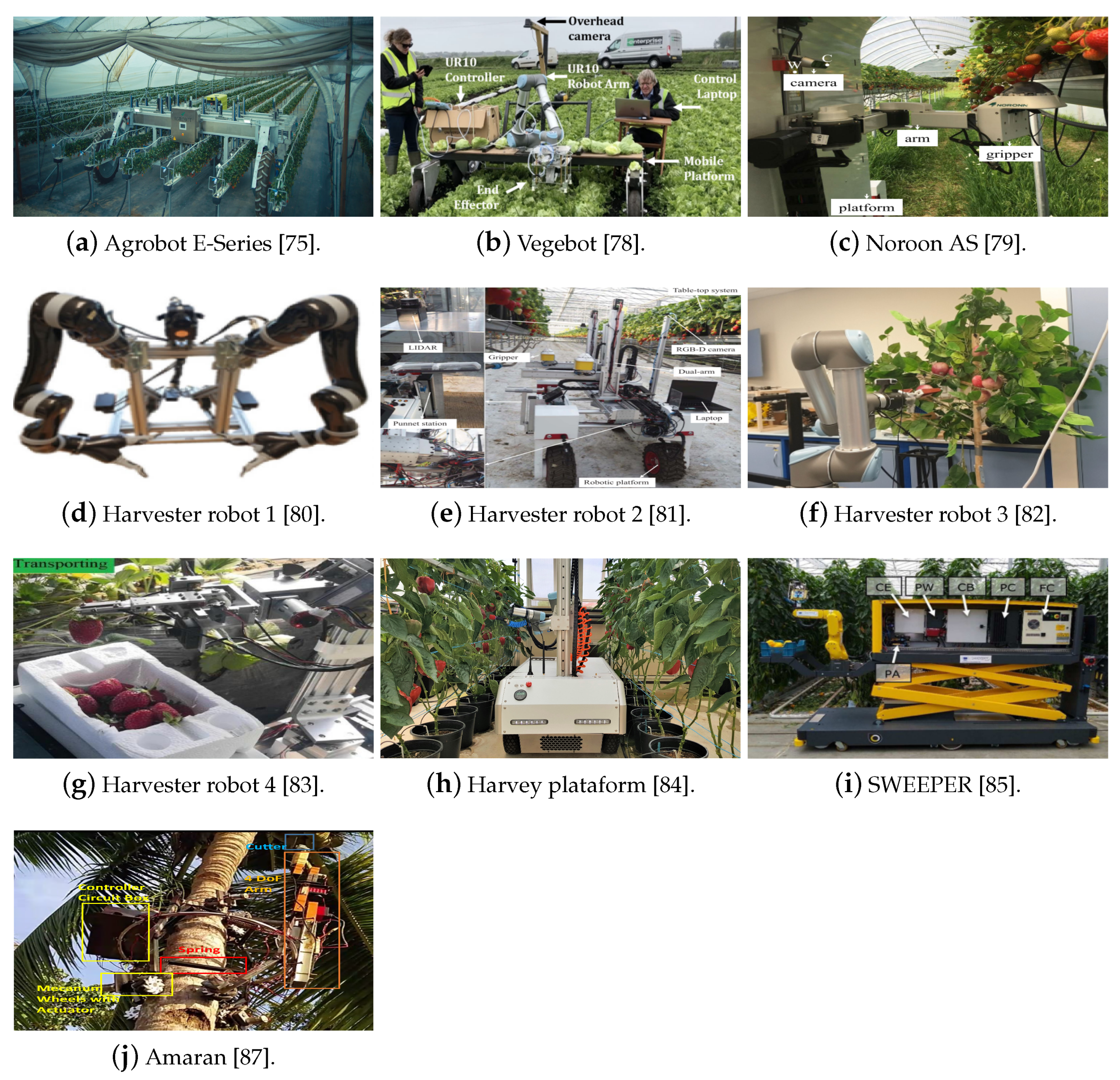
Figure 5. Examples of robots used in agriculture for harvesting.
2.5. Robotic Applications in Agriculture for Yield Estimation and Phenotyping
Through accurate data on the quantity and quality of the fruits growth, provided by more sophisticated tools, farmers can manage their crops more efficiently. Yield estimation is nothing more than monitoring the entire crop and estimate the produced fruit. On the other hand, several variables such as climate change and soil quality can interfere with the development of plants. Thus, by identifying the phenotype of the plants, it is possible to link to their respective genotype, making it possible to identify the proper growth conditions. It is noted, however, that for a robot to estimate phenotyping and/or yield it must have not only reliable sensory data, but also efficient computer vision algorithms. In 1998 and 2001 there were already researchers proposing the use of sensors and machine vision algorithms to detect crop rows and gather field information [31][32]. In this case, a camera and a RTK/GPS device were inserted in a tractor to be able to create spatial maps relating the crop height and width. Through ANN the robotic system obtained a hit rate of 84%, indicating that a machine vision system could be used as a crop prediction sensor. Thus, this subsection will address several robots developed over the years to perform the tasks of yield estimation and phenotyping, giving an emphasis on the ones developed in recent years.
The Shrimp robotic system shown in Figure 6a, equipped with six RGB cameras, was used to estimate the yield of apple orchards under natural lighting conditions. To locate each sampled image, the Shrimp platform relies on the integration of an Inertial Navigation System (INS) with a GPS. The image processing is based on Multiscale Multilayer Perceptron (MLP) and CNN and the detection of the apples was performed through Watershed (WS) segmentation and Circular Hough Transform (CHT). The Shrimp platform obtained an apple detection of 82.5%, F1 of 0.791 and a coefficient of determination r2 of 0.826, using CNN and WS [33].
 Figure 6. Examples of robots used in agriculture for yield estimation and phenotyping.
Figure 6. Examples of robots used in agriculture for yield estimation and phenotyping.
3. Conclusions
To propose new technical and scientific advances in the field of smart agriculture, it is first necessary to know the main existing works, exposing their advantages, limitations and common pitfalls in order to identify the real needs for improvements. After a systematic review of agricultural robotic systems applied in the execution of land preparation before planting, sowing, planting, plant treatment, harvesting, yield estimation and phenotyping, it was observed that 37% of robotic systems are 4WD, 64.52% don't have a robotic arm, 22.06% are used in weeding tasks, 32.23% use RGB cameras, 35.48% not included/not reported computer vision algorithms, 80.65% are in the research stage, 16.67% are designed by Australian companies/researchers and 41.94% are developed by countries on the European continent. The main characteristics observed were the little use of the concept of off-the-shelf, parallelism, the swarm of robots, simple and efficient computer vision algorithms, in addition to multi-purpose platforms that adapt appropriately to the type of crop studied. To improve the current agricultural robotic systems, four main areas have been proposed for future research works: locomotion systems, sensors, computer vision algorithms and IoT-based smart agriculture. This paper covered about 62 agricultural robotic systems and, just as it was observed a 22.98% increase in the average harvest success rate and a 42.78% reduction in the average cycle of harvesting robots between 2014 - 2021, it is expected that, with the improvement of the previously mentioned areas, the development of agricultural robotic systems will continue to increase their efficiency and robustness. Therefore, it is believed that this work was able to show not only the notable advances in the field of mobile robotics but also to correlate the advantages of investing in technologies that act as tools for transforming nature.
This entry is adapted from the peer-reviewed paper 10.3390/robotics10020052
References
- McBratney, A.; Whelan, B.; Ancev, T.; Bouma, J. Future Directions of Precision Agriculture. Precis. Agric. 2005, 6, 7–23.
- Lowenberg-DeBoer, J.; Erickson, B. Setting the Record Straight on Precision Agriculture Adoption. Agron. J. 2019, 111, 1552–1569.
- Tarannum, N.; Rhaman, M.K.; Khan, S.A.; Shakil, S.R. A Brief Overview and Systematic Approch for Using Agricultural Robot in Developing Countries. J. Mod. Sci. Technol. 2015, 3, 88–101.
- Santesteban, L.G. Precision viticulture and advanced analytics. A short review. Food Chem. 2019, 279, 58–62.
- Zha, J. Artificial Intelligence in Agriculture. J. Phys. Conf. Ser. 2020, 1693, 012058.
- Elijah, O.; Rahman, T.A.; Orikumhi, I.; Leow, C.Y.; Hindia, M.N. An Overview of Internet of Things (IoT) and Data Analytics in Agriculture: Benefits and Challenges. IEEE Int. Things J. 2018, 5, 3758–3773.
- Ayaz, M.; Ammad-Uddin, M.; Sharif, Z.; Mansour, A.; Aggoune, E.M. Internet of Things (IoT) Based Smart Agriculture: Toward Making the Fields Talk. IEEE Access 2019, 1.
- Oliveira, L.F.P.; Silva, M.F.; Moreira, A.P. Agricultural Robotics: A State of the Art Survey. In Proceedings of the 23rd International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines (CLAWAR 2020), Moscow, Russian, 24–26 August 2020; pp. 279–286.
- Fountas, S.; Mylonas, N.; Malounas, I.; Rodias, E.; Hellmann Santos, C.; Pekkeriet, E. Agricultural Robotics for Field Operations. Sensors 2020, 20, 2672.
- Shamshiri, R.R.; Weltzien, C.; Hameed, I.A.; Yule, I.J.; Grift, T.E.; Balasundram, S.K.; Pitonakova, L.; Ahmad, D.; Chowdhary, G. Research and development in agricultural robotics: A perspective of digital farming. Int. J. Agric. Biol. Eng. 2018, 11, 1–14.
- Bac, C.W.; Henten, E.J.v.; Hemming, J.; Edan, Y. Harvesting Robots for High-value Crops: State-of-the-art Review and Challenges Ahead. J. Field Robot. 2014, 31.
- Gao, X.; Li, J.; Fan, L.; Zhou, Q.; Yin, K.; Wang, J.; Song, C.; Huang, L.; Wang, Z. Review of Wheeled Mobile Robots’ Navigation Problems and Application Prospects in Agriculture. IEEE Access 2018, 6, 49248–49268.
- Sistler, F. Robotics and intelligent machines in agriculture. IEEE J. Robot. Autom. 1987, 3, 3–6.
- Raussendorf. Fruit Robot. Available online: (accessed on 1 March 2021).
- Siciliano, B.; Khatib, O. Springer Handbook of Robotics, 2nd ed.; Springer Publishing Company: Cham, Switzerland, 2016.
- Khan, N.; Medlock, G.; Graves, S.; Anwar, S. GPS Guided Autonomous Navigation of a Small Agricultural Robot with Automated Fertilizing System; SAE Technical Paper; SAE International: Warrendale PA, USA, 2018; Volume 1, p. 1.
- Nawaz, M.; Bourrié, G.; Trolard, F. Soil compaction impact and modelling: A review. Agron. Sustain. Dev. 2012, 33.
- Sakaue, O. Development of seeding production robot and automated transplanter system. Jpn. Agric. Res. Q. 1996, 30, 221–226.
- Haibo, L.; Dong, S.; Zunmin, L.; Chuijie, Y. Study and Experiment on a Wheat Precision Seeding Robot. J. Robot. 2015, 1, 1–9.
- FAO. Keeping Plant Pests and Diseases at Bay: Experts Focus on Global Measures. Available online: (accessed on 15 February 2021).
- Sinden, J.A.; for Australian Weed Management (Australia), C.R.C. The Economic Impact of Weeds in Australia: Report to the CRC for Australian Weed Management; CRC Weed Management: Adelaide, Australia, 2004; p. 55.
- Lee, W.S.; Slaughter, D.C.; Giles, D.K. Robotic Weed Control System for Tomatoes. Precis. Agric. 1999, 1, 95–113.
- Lee, W.S.; Slaughter, D.C. Plant recognition using hardware-based neural network. In Proceedings of the 1998 ASAE Annual International Meeting, Orlando, FL, USA, 12–16 July 1998; pp. 1–14.
- Schor, N.; Bechar, A.; Ignat, T.; Dombrovsky, A.; Elad, Y.; Berman, S. Robotic Disease Detection in Greenhouses: Combined Detection of Powdery Mildew and Tomato Spotted Wilt Virus. IEEE Robot. Autom. Lett. 2016, 1, 354–360.
- Pilli, S.K.; Nallathambi, B.; George, S.J.; Diwanji, V. eAGROBOT—A robot for early crop disease detection using image processing. In Proceedings of the 2015 2nd International Conference on Electronics and Communication Systems (ICECS), Coimbatore, India, 26–27 February 2015; pp. 1684–1689.
- Hayashi, S.; Yamamoto, S.; Saito, S.; Ochiai, Y.; Kamata, J.; Kurita, M.; Yamamoto, K. Field Operation of a Movable Strawberry-harvesting Robot using a Travel Platform. Jpn. Agric. Res. Q. 2014, 48, 307–316.
- ABARES. Australian Vegetable Growing Farms: An Economic Survey, 2012-13 and 2013-14. 2014. Available online: (accessed on 2 March 2021).
- Jie, L.; Jiao, S.; Wang, X.; Wang, H. A new type of facility strawberry stereoscopic cultivation mode. J. China Agric. Univ. 2019, 24, 61–68.
- Ceres, R.; Pons, J.; Jiménez, A.; Martín, J.; Calderón, L. Design and implementation of an aided fruit-harvesting robot (Agribot). Ind. Robot Int. J. 1998, 25, 337–346.
- Mandow, A.; Gomez-de-Gabriel, J.M.; Martinez, J.L.; Munoz, V.F.; Ollero, A.; Garcia-Cerezo, A. The autonomous mobile robot AURORA for greenhouse operation. IEEE Robot. Autom. Mag. 1996, 3, 18–28.
- Noguchi, N.; Reid, J.; Benson, E.; Stombaugh, T. Vision Intelligence for an Agricultural Mobile Robot Using a Neural Network. IFAC Proc. Vol. 1998, 31, 139–144.
- Noguchi, N.; Reid, J.F.; Ishii, K.; Terao, H. Multi-Spectrum Image Sensor for Detecting Crop Status by Robot Tractor. IFAC Proc. Vol. 2001, 34, 111–115.
- Bargoti, S.; Underwood, J.P. Image Segmentation for Fruit Detection and Yield Estimation in Apple Orchards. J. Field Robot. 2017, 34, 1039–1060.