An Unmanned System (US) or Vehicle (UV) can be defined as an “electro-mechanical system, with no human operator aboard, that is able to exert its power to perform designed missions”
- unmanned systems
- UAV
- UGV
- USV
- UUV
- sensors
- payload
- challenges
1. Introduction
An Unmanned System (US) or Vehicle (UV) can be defined as an “electro-mechanical system, with no human operator aboard, that is able to exert its power to perform designed missions” [1].
UVs can be remote controlled (by a remote pilot) or can navigate autonomously based on pre-programmed plans or more complex dynamic automation systems [2]. They include vehicles moving in the air (Unmanned Aerial Vehicle or System—UAV, UAS, commonly known as “drone”), on the ground (Unmanned Ground Vehicle—UGV), at the sea surface (Unmanned Surface Vehicles—USV) or in the water column (Unmanned Underwater Vehicles—UUV), briefly described in the following subsections.
2. Unmanned Aerial Vehicles (UAVs)
UAVs, also called drones, are unmanned systems navigating in the air, able to survey wide areas, and are able to reach human-hostile environments, too. They can be remotely piloted or autonomously controlled [3,4].
There exist different types of UAVs, depending on the specific purpose the UAV is designed for. UAVs can differ in size from the order of centimeters to tens of meters, in weight from tens of grams to thousands of kilograms, in operational altitude from tens of meters to thirty kilometers, and in range from 100 m to 1000 km [5].
Rotor wing UAVs are a kind of aerial vehicle possessing enormous diffusion and that is attracting growing interest among researchers. They have vertical take-off and landing capabilities and are often developed in the form of quadcopters, thanks to their small size, easy control and high maneuverability.
UAV-related technology is continuously and rapidly evolving, and the number of applications for UAVs is growing exponentially, and includes real-time monitoring, providing wireless coverage, remote sensing, search and rescue, package delivery, security and surveillance, precision agriculture, and civil infrastructure inspection, as shown in Figure 1 [3,4].
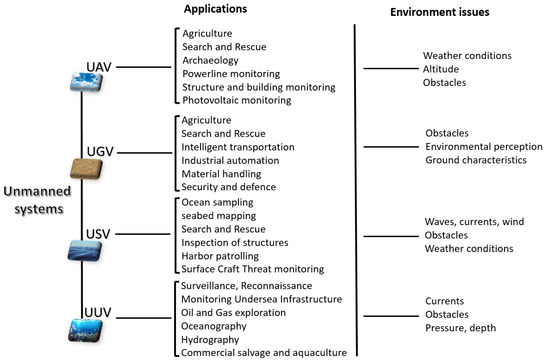
Figure 1. Unmanned system types and their critical environmental factors.
The environment in which UAVs operate can strongly affect their mission results. Extreme wind, rain and storms can cause the UAV to deviate from its predetermined path or, especially in the case of small UAVs, not allow the vehicle to operate and take measurements. Problems related to weather conditions are further exacerbated in the case of natural or man-made disasters, such as, for example tsunamis, hurricanes or terrorist attacks [6]. Another problem related to the UAV operating environment arises from the possible presence of obstacles along its path, and this concerns both outdoor and indoor environments. Moreover, obstacles can be stationary or moving, making avoiding them more complex.
The altitude reached by UAVs is another important parameter that can be influenced by the environment conditions. If the elevation of the area of interest changes rapidly and significantly, for example in the case of steep terrain, the UAV must be able to follow these changes quickly, adapting and reaching the required altitude. Moreover, in the case of high-altitude applications, the UAV must be able to adapt itself to the changes in atmospheric density and temperature, preserving its aerodynamic performance.
UAV payload can affect vehicle navigation and measurement abilities, as well as the mission endurance and covered area, which are important requirements for applications when the UAV needs to operate for extended periods of time over large regions of interest [6].
The limited payload weight, altitude, and covered distance, as well as the influences of weather condition and handling obstacles, represent some weaknesses of UAVs (Figure 1) that research is attempting to address. The widespread popularity of UAVs is not replicated in other classes of UVs.
3. Unmanned Ground Vehicles (UGVs)
UGVs are unmanned systems operating on the ground. They are used for many applications (Figure 1), including space exploration, environment sensing, and search and rescue, and can have many different configurations, usually defined by the task they must perform, as well as the environment in which they must operate. UGVs have been developed in different sizes (varying from 500 g to 25,000 kg [7]) and configurations, typically linked to the mission they were designed to carry out [8].
UGVs are generally equipped with a controller and on-board sensors to observe the environment and make decisions autonomously or send the information remotely to a human operator [2,8]. Since UGVs’ on-board sensors cannot see what is beyond obstacles around them, these kinds of unmanned vehicle can be impeded by their reliance on line-of-sight sensing (Figure 1) [9].
Additionally, for this kind of vehicle, the operating environment is a source of some challenges. Dust, smoke and rain can strongly influence the UGV mission results, limiting the operational speed and the capability of avoiding possible obstacles, such as, for example, other vehicles, which in this case can be either static or moving. UGVs must be able to adjust their trajectory and speed in a suitable time to avoid collisions. The higher the UGV speed, the further the distance at which the obstacles have to be detected, and the shorter the time available in which to change trajectory or stop the vehicle, also taking into account that UGV braking distance to full stop increases with speed.
The type of terrain on which the vehicle moves is another environmental factor capable of influencing its mission results and operations. The traversed ground can be of highway, urban, country, or off-road types. Urban environments are in general more complex and dynamic, due to the presence of many cross-roads, vehicles and pedestrians, moving at different speeds and in different directions. Off-road conditions can be less complex when the terrain is firm and regular, as in the case, for example, of a desert, but can also be more complex when the terrain conditions are irregular and unstable, as in the case of forests [10].
Gravel, pavement, soil of varying firmness, mud, snow, ice, water, and vegetation of various heights and thicknesses are other challenging kinds of terrain that UGVs have to traverse, while also paying attention to possible bodies of water and mud that the vehicle must be able to avoid in a timely fashion in order not to risk getting stuck.
Environmental perception and UGV level of autonomy are the main characteristics being focused on with respect to current and future technological developments for this kind of unmanned vehicle.
4. Unmanned Surface Vehicles (USVs)
USVs are vessels operating on the surface of water, and can be remotely operated or autonomous. USVs can be realized in many different forms, depending on the specific application [4]. They can vary in weight from tens of kg to thousands of kg, with speeds that can vary from 1 m/s to about 20 m/s [11].
USVs can operate in conditions that are dangerous and risky for human safety. Moreover, this kind of vehicle is compact, and has low maintenance costs, too.
Although USVs were initially used in typically naval applications, such as, for example, surveillance and reconnaissance, nowadays they are also widely used in civil applications, such as, for example, environmental monitoring and assessment, as can be seen in Figure 1.
Autonomous shipping, search and rescue, offshore surveying in the oil and gas industries, seabed mapping, and inspection of structures above and below water are other examples of USV applications [4]. USVs need to operate in the presence of waves, currents and winds (Figure 1).
This kind of vehicle operates in contact with two environments, air and water, that have completely different physical characteristics. It is necessary for USVs to have sufficient environmental perception to detect and avoid obstacles that may be above or below the water, to estimate their motion and distance, and to perceive, in the case of coastal areas, the boundary between water and land.
Adverse weather and water conditions such as rain and extreme wind or rough and choppy water can strongly affect USVs’ mission results and operation.
Endurance for long-term missions and operation under extreme weather conditions, as well as above and underwater obstacle avoidance are the technological challenges that form the main subjects of research.
5. Unmanned Underwater Vehicles (UUVs)
UUVs operate under the surface of the water with minimal or no human operator intervention. UUVs can be of different types, varying in shape and size, depth ratings, payload, navigational capabilities, and control. UUVs can differ in length from little more than one meter to tens of meters, can operate at different depths varying from 200 to 6000 m, and at different speeds from about 0.5 to 4 m/s, with a weight of up to thousands of kg [12,13].
These vehicles can be Remotely Operated Vehicles (ROVs), controlled by a remote operator, or Autonomous Underwater Vehicles (AUVs), operating independently from direct human input [4]. AUVs are the most complex, having to rely on autonomous functions in a difficult environment such as the aquatic one.
UUV applications include persistent surveillance, anti-submarine warfare, underwater construction and infrastructure maintenance support, oceanography, hydrography and mine countermeasures, as shown in Figure 1 [4].
UUVs must operate in a harsh environment under high ocean current and heavy hydraulic pressure (Figure 1). The amount of light available underwater is often poor, due to the water particulates scattering light as it enters the ocean, or to turbidity as, for example, in the case of shallow coastal water. UUV navigation and maneuverability can also be strongly affected by ocean currents and water density. In some extreme cases, sudden changes in density can even impede the movement of UUVs through the water. Vehicle stability can also be compromised by the effect of the movement of water caused by wind or density variations in deeper waters [14]. UUV must also pay attention to the detection and avoidance of static or moving obstacles, as in the case of the other kinds of UVs.
Moreover, since maintaining a constant connection with remote ground operators can be highly difficult in deep waters, precise navigation capabilities represent another critical issue [13,14].
reference (Editors will rearrange the references after the entry is submitted)
- National Institute of Standards and Technology Special Publication 1011. Autonomy Levels for Unmanned Systems (ALFUS) Framework, Volume I: Terminology, Version 1.1. September 2004. Available online: https://www.nist.gov/system/files/documents/el/isd/ks/NISTSP_1011_ver_1-1.pdf (accessed on 1 December 2020).
- Electronics Maker, Unmanned Vehicles—No pilot/driver on Board. 5 August 2014. Available online: https://electronicsmaker.com/unmanned-vehicles-no-pilotdriver-on-board#:~:text=An%20unmanned%20vehicle%20is%20the,including%20reconnaissance%20and%20attack%20roles (accessed on 1 December 2020).
- Daponte, P.; De Vito, L.; Mazzilli, G.; Picariello, F.; Rapuano, S.; Riccio, M. Metrology for drone and drone for metrology: Measurement systems on small civilian drones. In Proceedings of the 2015 IEEE Metrology for Aerospace (MetroAeroSpace), Benevento, Italy, 4–5 June 2015; pp. 306–311.
- Narayanan, A.; Rajeshirke, P.; Sharma, A.; Pestonjamasp, K. Survey of the emerging bio-inspired Unmanned Aerial Underwater Vehicles. In Proceedings of the 2nd International Conference on Emerging trends in Manufacturing, Engines and Modelling (ICEMEM -2019), Mumbai, India, 23–24 December 2019; Volume 810.
- Sándor, Z. Challenges Caused by the Unmanned Aerial Vehicle in the Air Traffic Management. Period. Polytech. Transp. Eng. 2017, 47, 96–105.
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634.
- Dilipraj, E. Technologies: Pragmatic Role of Robotics, 3D Printing and Supercomputers in Future Wars. In Asian Defence Review 2016; Knowledge World Publishers: New Delhi, India, 2016; ISBN 978-9383-649-90-7.
- Odedra, S. Using unmanned ground vehicle performance measurements as a unique method of terrain classification. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 286–291.
- Philips, A. Air- and Ground- Based Autonomous Vehicles Working Together, Dronelife.com. October 2014. Available online: https://dronelife.com/2014/10/02/air-ground-based-autonomous-vehicles-working-together/ (accessed on 1 December 2020).
- Ilas, C. Electronic sensing technologies for autonomous ground vehicles: A review. In Proceedings of the 8th International Symposium on Advanced Topics in Electrical Engineering (ATEE), Bucharest, Romania, 23–25 May 2013; pp. 1–6.
- Autonomous and Unmanned Surface Vessels for Marine Monitoring, Surveying and Rescue. Available online: https://www.unmannedsystemstechnology.com/company/oceanalpha/ (accessed on 1 December 2020).
- Vasudev, K.L. Review of Autonomous Underwater Vehicles. In Autonomous Vehicles; Dekoulis, G., Ed.; IntechOpen: London, UK, 2020; ISBN 978-1-83968-191-2.
- Heo, J.; Kim, J.; Kwon, Y. Technology Development of Unmanned Underwater Vehicles (UUVs). J. Comput. Commun. 2017, 5, 28–35.
- Ho, G.; Pavlovic, N.; Arrabito, R. Human Factors Issues with Operating Unmanned Underwater Vehicles. Proc. Hum. Factors Ergon. Soc. Ann. Meet. 2011, 55, 429–433.
This entry is adapted from the peer-reviewed paper 10.3390/s21041518