Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
Subjects:
Engineering, Ocean
|
Oceanography
Several oil spill simulation models exist in the literature, which are used worldwide to simulate the evolution of an oil slick created from marine traffic, petroleum production, or other sources. These models may range from simple parametric calculations to advanced, new-generation, operational, three-dimensional numerical models, coupled to meteorological, hydrodynamic, and wave models, forecasting in high-resolution and with high precision the transport and fate of oil. This study presents a review of the transport and oil weathering processes and their parameterization and critically examines eighteen state-of-the-art oil spill models in terms of their capacity (a) to simulate these processes, (b) to consider oil released from surface or submerged sources, (c) to assimilate real-time field data for model initiation and forcing, and (d) to assess uncertainty in the produced predictions. Based on our review, the most common oil weathering processes involved are spreading, advection, diffusion, evaporation, emulsification, and dispersion. The majority of existing oil spill models do not consider significant physical processes, such as oil dissolution, photo-oxidation, biodegradation, and vertical mixing. Moreover, timely response to oil spills is lacking in the new generation of oil spill models. Further improvements in oil spill modeling should emphasize more comprehensive parametrization of oil dissolution, biodegradation, entrainment, and prediction of oil particles size distribution following wave action and well blow outs.
- oil spill modeling
- oil weathering processes
- biodegradation
- transport and dispersion resurfacing
- turbulent mixing
1. Introduction
Due to the worldwide increase in oil/gas demand and the dwindling in onshore reserves, offshore oil/gas production has significantly increased its potential since the 1990s. In parallel, oil transportation technology evolved at the same pace as the oil production industry, with supertankers and pipelines of crude and product oil crossing the oceans. Offshore oil production and transportation threatens marine ecosystems with spillages, associated with immense environmental, social, and financial impacts, with the long-term effects being felt for decades [1].
Oil spills occur after natural releases, oil transportation, oil drilling and accidental collision or sinking of oil tankers, failures in pipelines and oil rigs, etc. Small spills are easier to handle effectively with existing technology. For this reason, size matters in oil spills and large spills are more important. On the other hand, recent studies have shown that major spill incidents have been fewer in number, the broad public exhibits a “memory” on the major spills, but generally remains unaware that minor spills happen daily. Based on this figure, over 80% of the incidents recorded since 1970 were small spills (<7 tons). Following data from the European Space Agency (ESA), approximate losses of 250,000 tons of oil per year are estimated due to the operating procedures of ships [2]. An additional 120,000 tons of oil per year are being spilled at ship terminals, near onshore refineries and other similar facilities [2,3]. Unfortunately, data for accidental spills are often incomplete and highlight the need for improved oil spill detection and monitoring.
Every time an oil spill occurs, the public loses faith in authorities and oil companies’ capacity to implement preparedness and response decisions to mitigate impacts [4]. The severity of impacts typically depend on the quantity and type of oil spill, the ambient conditions, and the sensitivity of organisms and their habitats to the oil [2]. When crude oil is spilled on the sea, an oil slick is formed, i.e., a thin oily layer floating on the sea surface, affected by the large-scale advective processes dominated by currents, winds, and waves leading to center of mass slick transport (order of tens to hundreds of meters per day), and the slow, low-scale, diffusive processes reshaping the slick (order of centimeters to meters per day) responsible for modifying contaminants’ concentration. The time scales and relative importance of the processes depend on spill-specific and environmental factors such as the quantity of oil spilled, the oil’s initial physico-chemical characteristics, and meteorological and sea state conditions. In parallel, a series of natural, complex, and self-competing processes, referred to as “oil weathering processes” (OWPs), tend to degrade the slick [5,6]. As hydrocarbons are non-conservative pollutants, their physico-chemical characteristics change over time as a result of OWPs. Spreading, evaporation, dispersion/diffusion, emulsification, and dissolution are the most crucial OWPs, acting at the early stages of the oil spill, while photo-oxidation, biodegradation, and sedimentation act in the longer term and determine the ultimate fate of the oil spilled. Oil density and viscosity are the parameters mostly altered by the OWPs after spillage [7].
Oil pollution may not only occur on the sea surface, but also in deeper waters, leading to even more extensive environmental impacts. The on-going exploitation of deep-water oil reserves and the installation of pipelines at high water depths increase the risks of accidental oil release from well blowouts and pipeline ruptures [8]. Major deep-water oil spill accidents caused by such occurrences are the 2010 Deepwater Horizon oil spill in the Gulf of Mexico, discharging approximately 492,000 to 627,000 tons of oil, and the 2011 Penglai 19-3 oil field spill in the Bohai Sea, China, discharging ~200 tons.
2. Oil Spill Models—The State-of-Art
2.1. Surface Oil Spill Models and Blowout/Buoyant Plume Models
Oil spill models have largely emphasized surface spill behavior and tracking, thus requiring the highlighting in the construction of comprehensive blowout/buoyant plume models. Subsurface oil spillages may result from single well tapping in a unique tank or from a platform that connects multiple tanks and other sources of submarine spills, such as wrecks, accidents, or blow-ups [152]. On the grounds that the combined vertical and horizontal transport of oil occurs during a massive deep spill, the potential ecological and human effects are far more substantial and convoluted than in ordinary surface oil spills [153]. A comprehensive table comparing the weathering processes during surface and subsurface releases is given in [154].
Earlier research has demonstrated that an underwater oil spill is primarily controlled by three parameters: initial jet momentum, plume buoyancy, and ambient current and turbulence [8]. Therefore, the problem of modeling subsea releases tends to become a problem of any underwater outfall, determined by the dynamics of buoyant jets and oil plumes, describing the eventual fate and transport of the spill [155]. Latest achievements in underwater oil spill modeling are presented in a review paper from Yapa et al. [156].
Overall, several elements like the restrictions in accurately measuring the prevailing oceanographic conditions and the limited available data on released volumes, exact location, fluxes, etc., make the modeling of deep subsea releases more demanding than shallow-water and surface releases. In blowouts/buoyant jets, this is attributed mostly to the expanded interaction among oil and the water column, in advance of atmospheric exposure, the presence of strong ocean currents, high pressures and low temperatures near the seabed, the interaction with the sub-bottom rocky layers and submarine sediments, and the existence of high pressures and temperatures in oil and gas reservoirs [152,153,154,157,158,159]. A detailed description of the convoluted thermodynamic processes, which take place in the near-field, and the hydrodynamic processes in the far-field is presented, for example, in [159]. Several works are cited in the literature that identify various flow regimes, varying in the composition of individual droplets and the output geometry to the complete spray of a jet [160,161,162,163]. A schematic diagram aiding the understanding of deep-water oil spill fate and effects is introduced by Murawski et al. [153].
In these deep-water releases, highly affected by the hydrostatic pressure, jet breakup events may occur [159], simulated by two methods: the first involves experimental equations predicting a droplet size at the end of the dynamic breakup location [135,164,165], while the second approach addresses the competing physiochemical processes by adjusting decomposition and aggregation, permitting a dynamic result of the complete size distribution of bubbles and droplets via the jet splitting area [166,167,168,169]. Furthermore, as for the buoyant plume, the first technique includes integral models, resolving the cross-sectional averaged flow along the center line trajectory of the plume [170,171,172], and the second method involves the use of three-dimensional computational fluid dynamics models [159,173].
2.2. The New Generation of Oil Spill Models
Broadly speaking, state-of-the-art oil spill models produce not only oil spill predictions, but also the assessment of ambiguity of such forecasts, which is crucial and urgent for up-to-date, beneficial, and cost-effective responses. This uncertainty in the forecasting of oil transport and transformation arises mostly from uncertainties in the input fields (errors in initial conditions, environmental data, and in the predictions of metocean models), internal model dynamics (e.g., numerical scheme, parameterization of transformation processes), and sparse observational data [174,175]. Due to this large number of uncertain sources introduced in oil spill models, ensemble forecasts are important to improve the quality of predictions (e.g., [176,177]). ASTM (American Society for Testing and Materials) [178] has established a standard for oil spill models requiring uncertainty estimates for oil spill trajectory forecasts to support response operators. However, the methodology for uncertainty estimation is not well-established in oil spill models [179] and presents a field of future research. Nevertheless, NOAA’s GNOME [180,181] model, for example, includes uncertainty algorithms regarding the perturbation of current and wind fields. De Dominicis et al. [176] used an ensemble of metocean models to improve oil trajectory forecasts with MEDSLIK-II model. Liubartseva et al. [179] introduced an uncertainty module in WITOIL Decision Support System, which includes MEDSLIK-II for oil spill forecasting, to automatically estimate prediction uncertainties related to the initial conditions of the spill, based on a parametric analysis methodology, employed in atmospheric pollution models [182]. Oil spread probability maps are produced as an indication of predictions uncertainty.
In parallel, state-of-the-art oil spill models use satellite SAR images/data to identify potential oil slicks and implement spill and drifter surveillance to improve slick forecasting. In detail, existing oil spill remote sensing techniques are presented in the review papers of Fingas and Brown [183,184]. The attention of the scientific community has been focused on enhancing 4D predictions by simulating oil spills backward in time to track the slick to its source [145]. These back-propagation approaches, when correlated with the operation of the AIS (automatic identification of ships) system, could track down the sources of world-wide oil spills.
Some of the most widely used oil spill models, capable of forecasting the trajectory and fate of surface and/or deep sea oil spills are: CDOG [156,172,185,186], OSCAR [118,119,120], OSIS [187], OILMAP [122,188], OILMAPDEEP [188,189,190,191], SIMAP [38,39,192], TAMOC [193,194,195], BLOSOM [155], MOTHY [196,197,198,199], OILTOX [200], MOHID [201], POSEIDON OSM [202], MEDSLIK [124,125,174], GNOME [180], OILTRANS [203], OSERIT [204], MEDSLIK-II [89,90], and OpenOil [112,205]. An analysis of these models is given in the following paragraphs.
CDOG (comprehensive deepwater oil and gas model) is a three-dimensional model, developed by Yapa and Li [206] and modified by Zheng et al. [186]. The model simulates the aspect of oil and gas released from deep water accidents [172,186]. Moreover, in CDOG, hydrate formation and disintegration, gas dissolution, non-ideal behavior of gas, and potential gas partition from the basic plume, in virtue of strong cross-currents, are connected to the jet/plume hydrodynamics and thermodynamics [172]. CDOG includes unsteady-state 3D fluctuation of ambient currents, density stratification, salinity, and water temperature [207]. Although CDOG has been implemented for response purposes, its main objective is research. Recently, the US government agencies (MMS (Minerals Management Service), NOAA) and oil companies have started using the CDOG model.
OILMAPDEEP (deep water oil spill model and analysis system) [188,189,190,191,208] has been developed by Applied Science Associates (ASA) in order to estimate the fate and transport of subsea releases. OILMAPDEEP estimates the near-field plume characteristics and oil droplet size distributions for a specified release [189,208]. Oil droplet size distribution predictions are in accordance with the study of [171,209]. Moreover, the trap height and droplet size distribution are used as initial conditions for the SIMAP [38,39,210], which computes the transport and fate oil processes in accordance with the near-field buoyant plume [208,210]. The model provides simulations of both the near-field and far-field environment [127,191,208,211]. Fate processes are included for both gas and oil, however, the details of the modeling algorithms are unpublished and rely on a database of oil chemical features, according to ASA. The model provides a subsurface dispersant treatment module and a Lagrangian particle tracking module, incorporating 2D and 3D hydrodynamic model flow fields [190,191]. Output data contain plan and section views of plume, in-water, and on-surface model forecasting [189,190,191]. The model has global capacity and includes RPS (Rural Planning Services) ASA’s own GIS.
SIMAP (integrated oil spill impact oil system) [38,39,208,210] also developed by ASA provides simulations of the three-dimensional trajectory, fate, and transport, as well as biological effects and other impacts of spilled oil and fuels [39,192]. Moreover, the model may be run in both stochastic and deterministic modes and includes a buoyant plume transition stage to the far field. The model has a Lagrangian particle tracking module in the far field [212]. It includes oil processes with specific model limitations, such as dissolution and sedimentation of oil, sinking, evaporation, dispersion, and spreading, complex oil and ice interaction, together with sediment and shoreline contamination. Some applications of the SIMAP model [39,192,212] include the environmental impact assessment of oil spills, hindcast/forecast simulations, natural wealth damage evaluation, contingency planning, environmental risk assessment, and cost-effective study. SIMAP has been validated against data of more than 20 large spills, such as the Exxon Valdez [38,39,213].
OSCAR (oil spill contingency and response model) is an advanced, three-dimensional model for planning and response to oil spills, developed by SINTEF [37,115]. It calculates the fate and effects of surface releases or blowout/buoyant plume of oil or gas [121]. The chemical fates sub-model allows multiple separate pseudo-components, which are transported across all environmental segments [37]. The transport and fate of oil spills at the surface are described not only by virtue of currents, winds, and turbulent diffusion, but also by means of oil-weathering algorithms, such as spreading, evaporation, natural dispersion, emulsification, dissolution, and volatilization. Moreover, in the water column, horizontal and vertical dispersion of entrained and dissolved hydrocarbons are represented via random walk approaches. Finally, the degradation and sedimentation processes of oil are described as first order decay process [121]. Essential elements of the model are SINTEF’s data-based oil weathering model [214,215,216], the three-dimensional oil trajectory and chemical fates model [118], an oil spill battle model [120], and exposure models for fish and ichthyoplankton [119], birds, and sea mammals [217]. Overall, OSCAR has been used in oil spill risk assessment, as well as in response planning and operations [121]. The model has been applied for hindcast and forecast of accidental releases in locations such as the North Sea, the Baltic Sea, the Gulf of Mexico, and the Mediterranean basin [121]. In the UK, OSCAR is routinely used for operational forecasting of oil spills, forced by ocean circulation models such as the U.S. Navy global hybrid coordinate ocean model (HYCOM) or the Copernicus system and wind forecasts from NOAA’s GFS (global forecast system) or CFS (climate forecast system).
OILMAP [122] has been developed by ASA as well as SIMAP, and both of them share the same code base. However, OILMAP is a three-dimensional oil spill response and contingency planning model. It deals with both surface and subsurface hydrocarbon releases and provides algorithms for oil spreading, evaporation, emulsification, entrainment, and oil-shoreline, oil bed, and oil-ice interaction [122,218]. The stochastic module predicts an extensive number of trajectories from a single site for producing probability statistics [218]. The distribution and mass balance of oil over time are simulated per type of oil spilled. The model has been applied in Dubai and Gulf region in 2006 [219]. It is used operationally by Oil Spill Response Limited (OSRL) in United Kingdom.
TAMOC (Texas A&M oil spill calculator) [193,194,195] is an open-source model, written in Python and Fortran, which simulates subsea oil spills and blowout plumes. Furthermore, its code is available for users in Github: http://github.com/socolofs/tamoc. It computes near-field plume dynamics, dissolution, particle tracking, transport of oil droplets, and phase equilibrium of hydrocarbons and incorporates an all-inclusive fate module. An extensive report of the TAMOC model and its mathematical background and equations are mentioned in the works of Gros et al. [193,195]. The oil fate and transport are expressed according to the formulation of McGinnis et al. [220] and as for jet and plume schemes, these are described by an integral model method [170,186,221]. A key feature of this model is the combination among the extended hydrodynamic behavior and the dynamic equations of motion, such as plume and intrusion formation. Finally, TAMOC has been validated via several experimental studies of bubble plumes, such as [221].
MOTHY (modèle océanique de transport d’hydrocarbures), developed by Météo-France [197], is a 3D Lagrangian pollutant drift model predicting the fate and transport of oil slicks on the ocean surface. MOTHY has been operational since 1994 and it has been used and validated during major real oil spill incidents, such as the Erika [197,222] and the Prestige [223]. The mixed layer is expressed via a combination of a shallow water model relative to the wind and the atmospheric pressure, in cooperation with a well-described turbulent viscosity model, while hydrodynamics are provided by CMEMS (Copernicus Marine Service) Med MFC (Marine Fisheries Commission) models and wind forcing provided by European Center for Medium-Range Weather Forecasts (ECMWF) [224]. National, higher-resolution ocean forecasting systems nested in CMEMS Med MFC are used in several cases to resolve coastal scale processes in various areas of the Mediterranean. The water column is described by a continuous profile from surface to bottom [224,225]. Turbulent diffusion is modeled via a three-dimensional random walk scheme [226]. This oil spill model provides some additional capacities: beaching, sedimentation, and backtracking, while pollutants can be either oil or floating objects [225].
OILTOX is a Lagrangian oil spill model [200] adapted to the Black Sea environment. It includes hundreds of oil types that are transported via the Black Sea and their fundamental physical-chemical features. This model simulates oil transport and fate according to [200,227] in five phases: oil-on-surface, oil-in-water, oil-on-bottom, oil-on-suspended sediments, and oil-at-shoreline. The model incorporates the basic transport and weathering processes, such as spreading by virtue of gravity and surface tension, advection due to wind and surface currents, evaporation, emulsification, oil-shore interaction, wave entrainment, resurfacing of entrained oil, and sedimentation [200]. Moreover, the model incorporates horizontal and vertical turbulent diffusion processes, which are represented by means of a random walk method.
The MOHID (Modelo Hidrodinâmico) Lagrangian oil spill model [201] is a sub-model of the MOHID water modeling system [228], developed by the Technical University of Lisbon. The movement of the tracers is caused by the surface flow field, the atmospheric winds, the spreading velocity from the dispersion module, and a randomly produced velocity via a random walk approach. MOHID Lagrangian transport module includes the following features: oil transport in water column, sedimentation, and beaching; oil weathering processes such as evaporation, dispersion, entrainment, sedimentation, dissolution, emulsification, and dispersion; and Eulerian concentration result.
The POSEIDON OSM is an oil spill model generated by the Hellenic Centre for Marine Research (HCMR), implemented and operational in the Aegean and Ionian Seas ([202,229] since 2000. It is a completely 3D oil spill model with the capacity not only to predict the transport, spreading, and weathering of the oil particles in the 3D space, but also to provide various oil weathering processes, such as evaporation, emulsification, beaching, and sedimentation [174,225]. Oil advection and dispersion is illustrated via a vast number of particles, each of which expresses a group of oil droplets of similar size and composition [174]. Oil transport is calculated using two modules: the circulation module and the wind generated wave module [174,225]. Moreover, the horizontal movement considering advection and the vertical transport of the oil are described through the results of the POSEIDON ocean forecasting system [225]. Stokes drift is also provided by the coupled wave model of POSEIDON ocean forecasting system [174,225]. Recently, some additional characteristics were integrated in the model via a dedicated web-based application (https://poseidon.hcmr.gr/components/forecasting-components/oil-spill-model [230]), where the user can determine the parameters of a real or hypothetical scenario and submit this event to the system, receiving the model output in Google Earth file format for a more real-time geospatial simulation.
GNOME (general NOAA operational modeling environment) is an oil spill model that predicts the fate and transport of pollutants and oil movement caused by winds, currents, tides, and spreading [180]. GNOME was developed by the Hazardous Materials Response Division and it is an open-source model, freely available in Github: https://github.com/NOAA-ORR-ERD [231]. The model is publicly available for use by the broader academic, response, and oil spill planning communities. GNOME provides the following elements: 3D particle transport, able to work with virtually any hydrodynamic model and measured field data, 1, 2 or 3rd order Runga-Kutta algorithm, with droplet rise velocity depending on density and droplet size; “leeway” wind surface transport: randomly adjustable with various user-adjustable values, providing a configurable downward spread; open-source code; backward running; oil weathering algorithms from the integrated open source ADIOS oil database, which is currently getting updated, with a beta version available for testing at: https://adios-stage.orr.noaa.gov [232]; sea ice interaction according to ice concentration and velocity; shoreline interaction (beaching) with configurable half-life based re-float; includes the TAMOC deep-water blowout model; comprehensive script for stochastic analysis and other batch processing; configurable for use on other drifting objects, such as for SAR and marine debris; integrated response options calculator (ROC) to evaluate the performance of spill response systems such as skimming, burning, and application of chemical dispersant; the PyGNOME, a Python setting, to build the web GNOME interface to the model, that performs batch processing and testing; and includes a GIS system for the model outputs visualization. In addition, GNOME is extremely configurable and tunable to adjust to field conditions and it can be driven via numerous data: measured point data, met models, and hydro models with a variety of meshes (structured, triangular). Finally, it has been used to support spill response for oil spills in the USA for almost twenty years. As GNOME can be integrated with any ocean circulation and meteorological model providing forecasts at different file formats, as well as observational data, NOAA has developed the GNOME Operational Oceanographic Data Server (https://gnome.orr.noaa.gov/goods) [233], a publicly available system to provide access to all the driver models and data sources available. Another important feature of the operational use of GNOME is the assimilation of available observations of oil spill locations in each forecasting cycle. Model parameters are fine-tuned to match the observations, and subsequently a new forecasting cycle and analyses are produced. Observational data assimilation improves the accuracy of forecasts for response authorities.
The OILTRANS particle transport model [203] is based on the LTRANS v.2 particle transport model, developed by North et al. [234]. The oil fates module of OILTRANS simulates the transport, fate, and oil weathering processes coupled to state-of-the-art operational metocean model [203]. The model provides the oil fate processes of spreading, advection, diffusion, evaporation, emulsification, and dispersion in order to estimate the horizontal movement of surface oil slick, the vertical entrainment of oil into the water column and the oil mass balance [203]. OILTRANS can be applied in any ocean or coastal field. The minimum data required are: bathymetric data, tidal current, and wind fields, together with information on the location, quantity, and type of spilled oil [235,236]. OILTRANS has been used, for example, for an accidental release in the Celtic Sea in February 2009 [203].
OSERIT, oil spill evaluation and response integrated tool, is an oil spill model that is capable of predicting the 3D drift and the fate of an oil spill at the surface and into the water column [237]. It contributes to the forecasting service of EMSA CleanSeaNet and has been used in the North Sea. The Lagrangian module expresses the independent movement of each parcel due to the winds, currents, and waves. Furthermore, OSERIT contains the buoyancy effect, turbulent diffusive transport, vertical dispersion of oil from surface to the water column, horizontal spreading, and beaching [237]. Moreover, it is able to calculate the drift of chemically dispersed oil and forecasts oil weathering processes, such as evaporation and emulsification, and their effects on oil features. Biodegradation and oil sedimentation are not included in OSERIT. The oil database of OSERIT is based on the oil types included in the ADIOS database [54,238].
BLOSOM (blowout and spill occurrence model) has been developed by the National Energy Technology Laboratory (NETL) of the USA. The model is written in Java programming language [239], and it is an extensive, open-source modeling suite that displaces the fate and transport of both subsurface oil blowouts and surface spills [240]. Moreover, this model is developed to predict offshore oil spills resulting from deep water (>150 m) and ultra-deepwater (>1500 m) well blowouts [155]. The model simulates oil spills from source to final fate and degradation stage. BLOSOM is flexible in its construction and utility from using it for basic particle tracking to applying advanced weathering modules and modules for jet/plume modeling [155]. BLOSOM supports risk evaluation and provides a comprehensive tool for response planning. It is designed to handle deep-water blowouts, such as Deepwater Horizon [241]. The jet plume element of BLOSOM has been assessed via experimental studies, which took place in the North Sea [242,243]. BLOSOM integrates various oil types from the ADIOS oil library [25].
Delft3D-PART, developed by Deltares, is a module of the Delft3D modeling suite that estimates the transport and simple water quality processes via a particle tracking method, implementing the 2D or 3D flow data by the Delft3D-FLOW (hydrodynamic module) [244]. Some test cases of the model are included in [245,246]. The particle tracking scheme follows a random-walk approach, referred to as the ”Monte Carlo method” [247]. Since the simulated behavior is stochastic, the number of particles is limited [248], however it is the only stochastic model in the full Delft3D modeling suite. Moreover, Delft3D-PART provides two modules: (a) the tracer module, simulating conservative or first order decaying substances, and (b) the oil spill module, simulating oil spills with floating and dispersed oil fractions. Furthermore, the processes that are involved in the oil module are advection of floating oil via wind and ocean currents, the dispersion of oil caused by waves, evaporation of floating oil, emulsification, sticking of petroleum to the coastline or seabed [244]. In addition, this oil module contains variations of oil features (density, viscosity, water content) on account of the above processes. It includes vertical dispersion for well-mixed systems and horizontal dispersion resulting from turbulence, being enhanced in time in accordance to the turbulence theory [244]. In Delft3D-PART it is feasible to illustrate a maximum of 30 different oil types.
MEDSLIK-II [89,90] is based on its precursor MEDSLIK oil spill model. It is an open-source oil spill model for surface oil spills in the marine environment. It is designed to forecast the transport and weathering of an oil slick and to express the displacement of a floating particle, using a Lagrangian formalism, in conjunction with an Eulerian ocean circulation model. Moreover, MEDSLIK-II predicts the transport of the surface slick due to the water currents and the wind. Oil particles are also dispersed by turbulent fluctuation elements [23], being formulated via a stochastic approach [13,249] using a random walk scheme [250,251]. For the Stokes drift parameterization, MEDSLIK-II uses the experimental Jonswap wave spectrum in terms of wind speed and fetch [252], while in MEDSLIK the forecasting wave parameters of SWH and wave period are used.
The necessary oil spill data to define initial conditions include the oil spill location, time and areal coverage of the spill, rate and duration of spillage, type of oil, and age of the oil spill from initial arrival in the sea. These data can be simply included to MEDSLIK-II via satellite monitoring systems [184]. In addition to oil spill data, MEDSLIK-II requires as input the wind field, the sea surface temperature, and the three-dimensional sea currents. MEDSLIK-II is closely coupled in terms of input format with atmospheric fields, provided by the European Center for Medium-Range Weather Forecasts (ECMWF) and with oceanographic fields (currents, temperature, salinity, and density), provided by CMEMS Med MFC. For several coastal applications in the Mediterranean basin, local high-resolution forecasting systems, which are nested in CMEMS Med MFC products, are used for providing met ocean forcing for operational oil spill forecasting with MEDSLIK-II. MEDSLIK-II produces as output the oil properties evolution and the position of the surface, dispersed oil, and of the oil arrived on the coasts. Furthermore, MEDSLIK-II calculates the mass balance components of the oil, with respect to time, providing time-effective tracking of oil weathering processes [174,179]. Figure 2 includes a schematic diagram of Medslik-II model with input and output data.
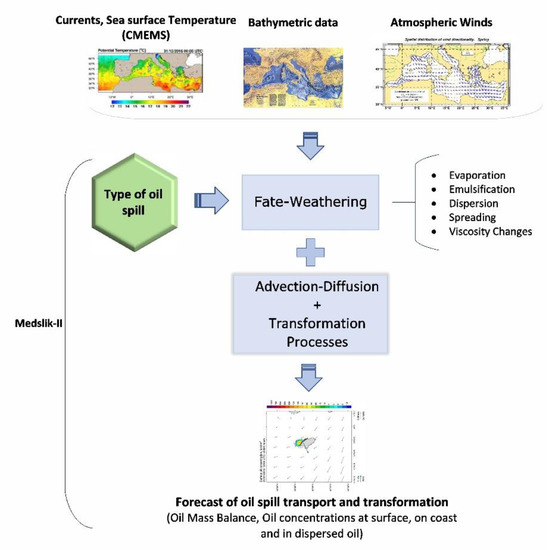
Figure 2. Schematic diagram of MEDSLIK-II model with input and output data.
A comprehensive description of MEDSLIK-II with the elaborate mathematical concept and the corresponding basic parameters of the model is given by De Dominicis et al. [89]. Moreover, the model has been validated with in situ data, surface drifters data, and with satellite data [90,176]. Interesting applications of the model are included in [176,177,179,253,254,255,256,257]. MEDSLIK-II is used operationally in the Mediterranean region, allowing also support to REMPEC [258] for oil spill emergencies in the entire Mediterranean basin.
The model has the following extra features: it incorporates a built-in oil database (from REMPEC [259]) with over 220 oil types which are widely used in the Mediterranean and the Black seas; it has been applied to forecast oil spill fate and transport during numerous emergency cases in the Mediterranean Sea (Lebanese oil pollution crisis in 2006, Und Adriyatik in 2008, and the Costa Concordia emergency in 2012). The sensitivity of the oil spill predictions to several model parameterizations is examined and the outputs are validated by means of surface drifters, SAR (synthetic aperture radar), and optical satellite images.
Due to a vast range of parameters that handle the oil movement and transformation in MEDSLIK-II, recently, implemented straightforward and effective algorithms to evaluate uncertainties may resulting from the initial oil spill conditions [179], ocean currents, and winds [174].
The oil drift module OpenOil is based on the open source [260], python-based, trajectory framework of OpenDrift [205], and it is a newly-integrated oil spill transport and fate model [112]. A conceptual flow diagram of the OpenDrift model is included in Figure 3. OpenOil (Figure 4) has been implemented operationally in Norway, as an oil spill contingency and search and rescue model [261,262] and for drifter and oil slick observations in the North Sea [112,263]. MET Norway uses in-house high-resolution ocean circulation and meteorological models as forcing for providing operational oil spill forecasts with OpenOil. If needed, coarser resolution forecasts from CMEMS for hydrodynamics and ocean state and NOAA’s GFS for wind fields can be also used. This model integrates algorithms with several physical processes, such as wave entrainment of oil [126], vertical mixing by virtue of oceanic turbulence [126,141], resurfacing of oil on account of buoyancy [111], and emulsification of oil properties [25,126]. Resurfacing is parameterized based on oil density and droplet size by means of Stokes Law, and for this reason the model’s physics are very sensitive to the specification of the oil droplet size distribution [261,262]. In OpenOil, the oil properties are obtained from the ADIOS Oil Library. The ADIOS oil database [25] is also open-source, written in Python, and contains measured properties of almost 1000 oil types across the world [205]. In contrast to the above, dissolution, which is an important oil weathering process for blowout/buoyant plume models, is not yet implemented.
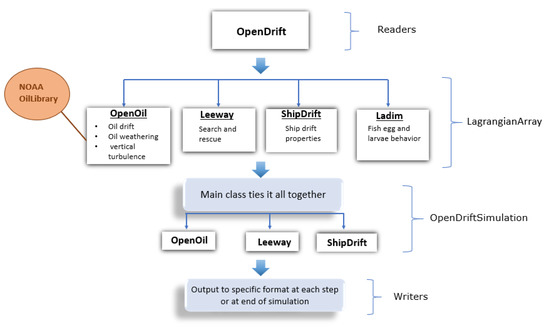
Figure 3. Conceptual flow diagram of the OpenDrift model.
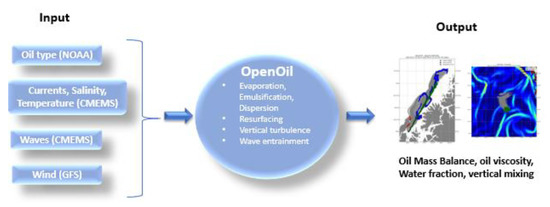
Figure 4. Schematic diagram with methodology of the OpenOil model.
This entry is adapted from the peer-reviewed paper 10.3390/jmse9020181
This entry is offline, you can click here to edit this entry!