Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
Subjects:
Remote Sensing
The planet Mars, which is in the habitable zone of the solar system and is one of the closest planets to Earth, stands in contrast to Venus; therefore, it has attracted much attention and exploration as the most likely planet for future human colonization.
- Mars
- Mars Orbital Radars
1. Introduction
The question of whether extraterrestrial life exists in the universe and whether other planets are suitable for human colonization has long been a primary focus of our space exploration [1,2]. The planet Mars, which is in the habitable zone of the solar system and is one of the closest planets to Earth, stands in contrast to Venus; therefore, it has attracted much attention and exploration as the most likely planet for future human colonization [3,4,5]. Its nature has sparked interest in the possibility of life’s existence on Mars [6,7,8]. Human exploration of Mars through spacecraft missions started in the 1960s, with the hope of discovering extraterrestrial life on the planet [6,9,10,11]. Over the subsequent decades of research, it has been observed that the current surface conditions on Mars do not support the long-term existence of liquid water [12]. However, the Martian morphology shows that the presence of extensive networks of channels, outflow channels, dried-up deltas, and alluvial fan landforms suggests a history of abundant liquid water in Mars’ past [12,13,14]. In the early 21st century, both Europe and the United States launched missions, such as the Mars Express and Mars Reconnaissance Orbiter, to explore the possibilities of life on Mars [15,16]. These missions carried radar instruments, such as MARSIS (Mars Advanced Radar for Subsurface and Ionospheric Sounding) and SHARAD (SHAllow RADar) that have extensively probed the Martian subsurface in the past decade [17,18]. Those radars led to the discovery of significant water-ice deposits at the North and South Poles of Mars [19,20,21,22]. In 2020, China launched the Tianwen-1 mission to Mars, which also carried a radar payload on its orbiter [23,24]. The name of the Chinese orbiter-mounted radar is MOSIR (Mars Orbiter Subsurface Investigation Radar). MOSIR is primarily aimed at probing the subsurface structure of Mars and finding water resources. Its detection frequency expands the frequency range of the other two radars [23,25].
In recent years, MARSIS has identified bright reflections at the bottom of the Subsurface Polar Layered Deposits (SPLDs) on the southern polar of Mars, and the detection principle is as shown in Figure 1. Orosei et al. [26] reasoned that these bright reflections are indicative of liquid water through the inversion of dielectric constants. They proposed that a high concentration of brines has lowered the freezing point of the liquid water, enabling its presence beneath the south polar ice cap [26]. Subsequently, Lauro et al. [27] discovered multiple bright reflections, using the latest MARSIS data, and suggested the existence of multiple liquid-water bodies at the bottom of the SPLDs. The presence of liquid water implies the possibility of life on Mars and provides potential directions for human colonization. As a result, discussions regarding the existence of liquid water at the South Pole of Mars have ensued. Some researchers argue that even with high-concentration brines, the current temperatures and heat flux on Mars would prevent the existence of liquid water [28]. They suggest that the cause of the bright reflections might be differences in the dielectric properties of minerals at the bottom of the SPLDs [29] or clay [30]. Additionally, layered interference within the SPLDs has been proposed as one of the causes of the bright reflections [31]. In response to these doubts, researchers have conducted laboratory experiments to measure the dielectric properties of relevant materials under corresponding conditions. They argue that materials such as clay cannot cause such bright reflections and they continue to support the view that the cause of the bright reflections is brines with high chloride content [32,33]. Currently, the cause of these bright reflections remains inconclusive.
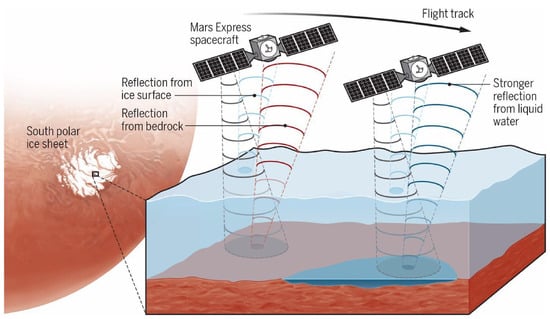
Figure 1. Schematic diagram of the Mars orbiter-mounted radar-detection principle. An example of MARSIS detecting liquid water under the Martian ice cap. Image source from the European Space Agency.
2. Detection Principles of Mars Orbital Radars
2.1. Introduction of Mars Orbital Radars
MARSIS is carried by the Mars Express spacecraft launched by the European Space Agency (ESA). It was initiated in August 2005 and is designed to explore the subsurface structures and ionosphere of Mars [34,35]. MARSIS consists of several components: (1) a 40 m-long dipole antenna oriented parallel to the Mars Express movement direction; (2) a 7 m-long monopole antenna perpendicular to the dipole antenna; (3) a dual-channel data processor; and (4) control units for power supply and electronic digital signals [36]. The primary antenna, the dipole antenna, is used to observe subsurface echoes from Mars. The secondary antenna, the monopole antenna, is employed to receive non-nadir reflections, reducing interference with the echoes received by the primary antenna. When probing subsurface structures, MARSIS operates at four different frequencies: 1.8 MHz, 3 MHz, 4 MHz, and 5 MHz, each with a bandwidth of 1 MHz [37]. The low-frequency pulses emitted by the radar enable the detection of structures several kilometers beneath the Martian surface [37].
SHARAD is carried by NASA’s Mars Reconnaissance Orbiter, launched in August 2005 [39]. It primarily operates during the Martian night-time, to observe the subsurface structure and water ice on Mars [15]. SHARAD features a pair of 10 m-long dipole antennas and it operates at frequencies between 15–25 Hz [38,40]. Its high-frequency pulses provide a higher resolution than MARSIS, but its penetration depth is less than that of MARSIS. Unlike MARSIS, SHARAD has a weaker surface-penetrating capability, due to its higher-frequency radar, which limits its ability to probe the subsurface hundreds-to-thousands of kilometers below the Martian surface. However, its high-resolution characteristics allow the radar to achieve more precise detection of the subsurface at depths ranging from tens to hundreds of meters on Mars. Consequently, SHARAD focuses on studying surface-related terrain structures and material composition [15]. MARSIS and SHARAD complement each other, in terms of exploration depth and radar resolution [41]. Over the past two decades, both radars have been utilized to survey Mars’ polar regions [42,43,44] and other areas [45,46,47,48], mapping terrain [43,49,50] and investigating the distribution of water ice on Mars [16,47,51,52]. In recent years, these radars have also hinted at the possible presence of liquid water on Mars [26].
In addition to the MARSIS and SHARAD radar systems, Mars also features the MOSIR radar onboard China’s Tianwen-1 mission, launched in 2020. MOSIR operates at three different frequencies: 10–15 MHz, 15–20 MHz, and 30–50 MHz, enabling penetration depths of several hundred meters into the Martian surface [23]. MOSIR emits either low- or high-frequency pulses, with vertical resolutions of 30 m and 7 m, and horizontal resolutions of several hundred meters (along-track) by several kilometers (cross-track). Unlike the previous two radar systems mentioned, MOSIR radar employs two pairs of orthogonal dipole antennas (9 m in the cross-track direction and 10 m in the along-track direction). The antennas in the along-track transmit radar pulse and the whole cross-dipole antennas are utilized for echo reception. This configuration enables the reception of cross-track echoes, providing additional information for material-property analysis [23]. Apart from investigating Martian water ice, MOSIR is also designed to provide insights into aspects such as searching for potential life, surface terrain, and the internal structures of Mars [23,53,54].
2.2. Detection Principles of Mars Orbital Radars
The radars exploring Mars operate in different modes, including MARSIS’ SS1, SS2, SS3, SS4, SS5, and AIS (Atmospheric and Ionospheric Sounding mode). MARSIS uses the SS1–SS5 modes (subsurface sounding mode) while detecting the subsurface of Mars (such as liquid water under the Martian ice caps) and selects different modes according to the diversity of the topography [17]. Similarly, MOSIR has three operational modes: HFSS, LFSS plus ISS, and ADM [23]. The radars select the appropriate operational modes based on the specific exploration requirements. The spacecraft carry multiple operational modes, and the radars generate substantial raw data, due to varying penetration depths and resolutions. The downlink of the data can potentially influence the radar operations. Therefore, the radars need to address issues related to onboard preprocessing, mode coordination, utilization of polarization information, compression ratios, etc. [55,56,57,58,59]. Furthermore, each operational mode requires tailored data types and adjustable parameters, enhancing the radars’ adaptability and flexibility in exploration [60]. When attempting to detect faint echoes from beneath the surface of Mars, radar systems that operate at lower frequency bands with wider bandwidths can experience waveform distortions. These distortions are caused by the transmission module, antenna, and reception module, and can lead to significant differences between received signals and ideal waveforms [40,61].
To address this, measurements and simulations of the radar’s transmission and reception modules, as well as antenna patterns, are required. These are then compared to the ideal signal spectrum, to compensate for waveform distortions [61,62]. During daytime surface exploration on Mars, the ionosphere can cause signal defocusing [55,63]. To mitigate this effect, the radar systems measure the total electron content of the ionosphere, to obtain compensation coefficients. Doppler analysis is also employed to achieve imaging results [64]. Additionally, the motion of the spacecraft itself can introduce signal variations. Doppler-beam sharpening techniques are utilized to compensate for motion in directions that are different from the vertical direction of the spacecraft [65,66]. Once the radar data are obtained, corresponding analysis is performed, based on the research objectives.
This entry is adapted from the peer-reviewed paper 10.3390/universe10010043
This entry is offline, you can click here to edit this entry!