Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
Gait refers to the movement patterns of an individual’s walk. It encompasses the rhythm, speed, and style of movement which require a strong coordination of the upper and lower limbs. The dramatic increase in the use of numerous sensors, e.g., inertial measurement unit (IMU), in our daily wearable devices has gained the interest of the research community to collect kinematic and kinetic data to analyze the gait. The most crucial step for gait analysis is to find the set of appropriate features from continuous time series data to accurately represent human locomotion.
- gait analysis
- human activity recognition
- time series sensory data
- feature encoding
- classification
1. Introduction
Gait refers to the movement patterns of an individual’s walk. It encompasses the rhythm, speed, and style of movement which require a strong coordination of the upper and lower limbs. The process of gait analysis involves evaluating an individual’s walking pattern to assess their biomechanics and identify any abnormalities or inefficiencies in their movement [1]. It has been an active research area over the last few years due to its utilization in numerous real-world applications, e.g., clinical assessment and rehabilitation, robotics, gaming, entertainment, etc. [2][3]. The quantitative gait analysis has also been explored as a biometric modality to identify a person [4]. The gait analysis has several advantages over other existing modalities; in particular, it is unobtrusive and difficult to steal or falsify. Gait analysis is a challenging task because it involves the complex coordination of human skeletal, muscular, and nervous systems. Additionally, the gait can be affected by a wide range of factors, such as age, injury, disease, and environmental conditions. This results in intra-personal variations, which are always greater than inter-personal variations.
The gait data can be gathered via a variety of sensing modalities that can be broadly divided into two groups: using sensing modalities [5] and using visual cameras [3]. Figure 1 illustrates these sensing modalities that can be used for data gathering. Each of these modalities have their own strengths and limitations, and researchers choose to use single or a combination of several modalities to capture gait data based on their research questions and goals. Vision-based systems have been extensively used in the gait analysis due to their higher precisions however, their use raises confidentiality and privacy concerns [6]. Conversely, the digital sensors such as inertial measurement units (IMU), and pressure sensors have been also used to collect the gait data. These tiny sensors can easily be embedded in our environment, including walking floor, wearable devices, and clothes. Furthermore, a few of such sensors are already embedded in our daily used digital gadgets, e.g., smart phones, smart watches, and smart glasses [7]. These devices generate data in the form of pressure signals, velocity, acceleration, and positions which can be used to represent the gait.
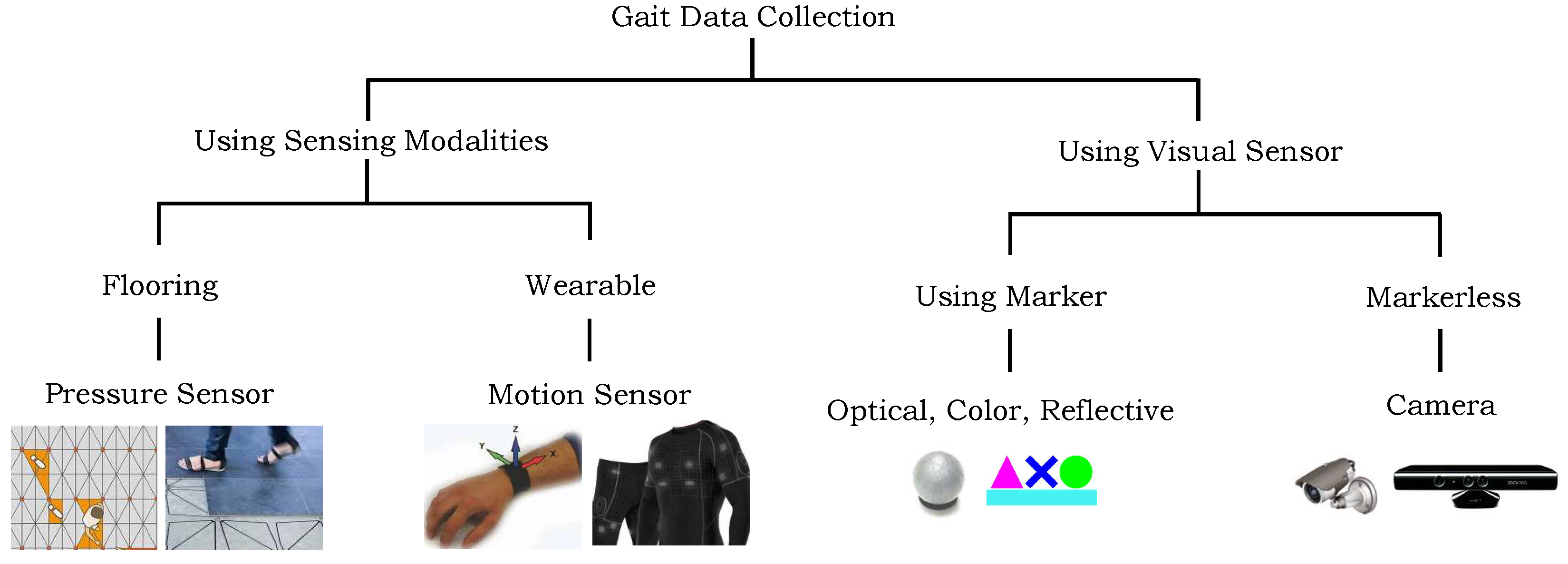
Figure 1. A set of sensing modalities that can be used for gait data collection.
Analyzing gait requires the use of sophisticated tools and techniques. Since the gait comprises continuous time series data, we need to extract a set of relevant features from these raw data to represent gait patterns. There are several approaches in the literature to extract features, and they can be categorized into three groups: (1) handcrafted [8], (2) codebook-based [9], and (3) automatic deep learning-based [10] feature extraction approaches. The handcrafted features are usually a few statistical quantities, e.g., mean, variance, skewness, kurtosis, etc., that are extracted from raw data based on the prior knowledge of experts in the application domain. Later, these features are fed to machine learning algorithms for classification. Typically, they are simple to implement and are computationally efficient; however, they are designed to solve a specific problem and are not robust [7]. The codebook-based feature learning techniques follow the channel of Bag-of-Visual-Words (BOVWs) approach [11] to compute gait features. Specifically, they employ clustering algorithms, e.g., k-means, to build a dictionary (also known as codebook) using the gait sub-sequences from raw data. The data are grouped based on their underlying similarities, and the clusters’ centers are known as “codewords”. Later, a histogram-based representation is computed for other sequences by tying them to the closest-related codeword. Codebook-based techniques are proven to be robust as they can capture more complex patterns in the gait data; however, they are computationally expensive [12]. Deep learning-based techniques automatically compute discriminative features directly from the input data using artificial neural networks (ANNs). A deep network usually comprises several layers where each layer consists of artificial neurons. After obtaining input, a specific feature map is computed by the neurons in each layer and then forwarded to the next layer for further processing, and so forth. Finally, the network’s last layers generate highly abstract feature representations of the raw sensory data. A few examples of deep learning approaches for gait analysis are convolutional neural networks (CNNs) [13], recurrent neural networks (RNNs) [14], and long short-term memory networks (LSTMs) [15]. Deep learning-based approaches can automatically learn complex features from raw data and are adaptable to new datasets and scenarios; however, they are computationally much more expensive and require a huge amount of labeled instances to optimally choose the hyperparameters’ values of the deep network. The entire process is greatly hampered by the lack of prior information necessary to encode the appropriate features in the application domain and the choice of the best parameters for the machine learning algorithms [7].
Gait analysis is a fundamental tool in biomechanics that allows for both quantitative and qualitative assessment of human movement. It involves the analysis of the spatiotemporal parameters, kinematics, and kinetics of gait, which are important indicators of the locomotion function [16][17][18]. This research mainly emphasizes on gait analysis using multimodal time series sensory data. The existing techniques employed either a pressure sensor [19][20][21] or an IMU [22][23] to encode walking patterns. In recent years, a large number of algorithms has been presented to investigate the movement of human body parts for clinical and behavioural assessment. They can be broadly divided into three groups, as depicted in Figure 2.

Figure 2. Classification of existing feature encoding techniques using sensory data based on their underlying computing methods.
2. Handcrafted Feature-Based Techniques
These set of techniques either compute several statistical measurements on input data (e.g., average, variance, skewness) or extract more complex gait characteristics, which may include stride length, joint angles, and other related features. In the context of machine learning, handcrafted features refer to manually designed features that are extracted from raw data and used as input to a classifier [8][24][25][26]. For instance, the technique proposed in [27] extracted several statistical quantities on input data (e.g., mean, median, mode, standard deviation, skewness, and kurtosis) to show the gait fluctuation in a patient with Parkinson’s. They employed Fisher Discriminant Ratio to determine the most discriminatory statistical feature. A comparative study of different handcrafted features is proposed in [24] for the early detection of traumatic brain injury. The authors employed the location and accelerometer sensory data of a smartphone to extract nine gait features, including coefficient of variance, step count, cadence, regularity in step, stride, etc. Similarly, the authors of [28] extracted standard deviation, skewness, kurtosis, and bandwidth frequency features from the accelerometer data of an IMU sensor mounted on the subject’s lower back to distinguish between normal and stroke gait patterns. The study presented in [29] extracted thirty-eight statistical quantities, including maximum, minimum, average, spectral energy, etc., to monitor and quantify various human physical activities using a smartphone’s IMU sensory data. Similarly, the technique proposed in [30] employed frequency domain features to assess gait accelerometer signals. The approach proposed in [31] analyzed the gait sensory data using adaptive one-dimensional time invariant features.
These techniques appear simple in implementation; however, they are highly based on expert knowledge in the application domain. Additionally, they are designed to solve a specific problem and are not robust.
3. Codebook-Based Approaches
These techniques follow the work-flow of the BOVWs approach to encode the raw sensory input data into its compact but high-level representation. In particular, the input data are clustered based on similar patterns using a clustering algorithm (e.g., k-means) to create a dictionary. The cluster centers in the dictionary are known as codewords which describe the underlying variability in the gait data. Later, a final representation of the raw gait input data is achieved by estimating the distribution of these codewords in the gait sequence. This results in histogram-like features (where a histogram bin represents the occurrences of a specific codeword) which are fed to a classification algorithm for further analysis. For instance, the authors of [7][32] employed sensory information from commonly used wearable devices to identify human activities. They built a codebook using a k-means clustering algorithm, and the final gait representation is achieved using a simple histogram-binning approach. Similarly, the technique proposed in [33] employed IMU sensory data from smartphones and smartwatches to recognize Parkinson’s tremor using a codebook-based approach. In [34], research was carried out to recognize the human gait phase using two sensors: an accelerometer and a gyroscope. A codebook-based approach was explored to extract gait features from the raw sensory data. Similarly, the authors of [35] presented an approach to determine the best working positions for various movement phases and to guide the performer on how to keep them while performing physical activities. They explored a k-means clustering codebook to encode the different working postures for each phase of movement. In [36], a separate codebook is constructed to each sensor modality, including accelerometer, gyroscope, and magnetometer. The resulting features were concatenated to form a compact and high-level feature vector to classify human daily activities using SVM with a radial basis function (RBF) kernel. The technique in [37] presented a visual inertial system to recognize daily activities using two RGB-D (red, green, blue, and depth) detectors with a wearable inertial movement unit. They employed codebook-based technique on different sensing modalities to compute the desired features. In [12], a detailed comparison of different codebook-based feature encoding approaches is presented to recognize gait.
These techniques are proven to be robust, to some extent, as they can capture more complex patterns in the gait data; however, they are computationally expensive [12]. Additionally, this process of codebook computation may need to be performed again if new classes are added in the dataset [38].
4. Deep Learning-Based Approaches
Lately, automatic deep learning-based feature extraction approaches have been largely explored in different classification tasks due to their robustness in automatic feature extraction, generalization capabilities, and convincing recognition results. A deep network is typically an end-to-end architecture that can learn complicated patterns and relationships in input data using a fully automated feature extraction process. In particular, it comprises many layers of interconnected neurons. The network’s intricate and iterative structure allows for the learning of high-level features from input data as it passes it through (i.e., the weight adjustments of neurons and back-propagation of errors [39]). Numerous automatic feature learning-based techniques on gait analysis have been proposed in the past; convolutional neural networks (CNNs) [40] and long short-term memory (LSTM) [41] are a few examples to quote. For instance, the authors of [40] presented an IMU-based spectrogram technique to categorize the gait characteristics using a deep CNN. The authors of [42] explored a CNN to extract the appropriate high-level feature representation from pre-processed time series input data. They turned the input data into two-dimensional (2D) images where the y-axis represents various features and the x-axis represents the time.
Since a CNN is typically designed to process imagery data, a few other networks have also been explored to analyze gait [43][44][45]. For instance, the authors of [41] employed window-based data segmentation to classify gait sequences using a multi-model long short-term memory (MM-LSTM) network. To compute features from each window, the MM-LSTM network accepts input gait data that have been segmented into several overlapping windows of equal length. The authors of [46] employed recurrent neural networks (RNNs) for gait analysis. The method for calculating gait mechanics using an artificial neural network (ANN) with measured and simulated inertial measurement unit (IMU) data is suggested in [47]. The authors concluded that more precise estimations of gait mechanics can be obtained by combining the ANN with both simulated and actual data. In [48], a comprehensive overview of different deep learning models is presented to monitor the human gait.
This entry is adapted from the peer-reviewed paper 10.3390/s24010075
References
- Whittle, M.W. Gait analysis. In The Soft Tissues; Elsevier: Amsterdam, The Netherlands, 1993; pp. 187–199.
- Ghent, F.; Mobbs, R.J.; Mobbs, R.R.; Sy, L.; Betteridge, C.; Choy, W.J. Assessment and post-intervention recovery after surgery for lumbar disk herniation based on objective gait metrics from wearable devices using the gait posture index. World Neurosurg. 2020, 142, e111–e116.
- Khan, M.H.; Farid, M.S.; Grzegorzek, M. Vision-based approaches towards person identification using gait. Comput. Sci. Rev. 2023, 42, 100432.
- Khan, M.H.; Farid, M.S.; Grzegorzek, M. Spatiotemporal features of human motion for gait recognition. Signal Image Video Process. 2019, 13, 369–377.
- Ahad, M.A.R.; Ngo, T.T.; Antar, A.D.; Ahmed, M.; Hossain, T.; Muramatsu, D.; Makihara, Y.; Inoue, S.; Yagi, Y. Wearable sensor-based gait analysis for age and gender estimation. Sensors 2020, 20, 2424.
- Kolokas, N.; Krinidis, S.; Drosou, A.; Ioannidis, D.; Tzovaras, D. Gait matching by mapping wearable to camera privacy-preserving recordings: Experimental comparison of multiple settings. In Proceedings of the 2019 6th International Conference on Control, Decision and Information Technologies (CoDIT), Paris, France, 23–26 April 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 338–343.
- Amjad, F.; Khan, M.H.; Nisar, M.A.; Farid, M.S.; Grzegorzek, M. A comparative study of feature selection approaches for human activity recognition using multimodal sensory data. Sensors 2021, 21, 2368.
- Rani, V.; Kumar, M.; Singh, B. Handcrafted Features for Human Gait Recognition: CASIA-A Dataset. In Proceedings of the Artificial Intelligence and Data Science: First International Conference, ICAIDS 2021, Hyderabad, India, 17–18 December 2021; Revised Selected Papers. Springer: Berlin/Heidelberg, Germany, 2022; pp. 77–88.
- Khan, M.H.; Farid, M.S.; Grzegorzek, M. A generic codebook based approach for gait recognition. Multimed. Tools Appl. 2019, 78, 35689–35712.
- Zhang, Z.; He, T.; Zhu, M.; Sun, Z.; Shi, Q.; Zhu, J.; Dong, B.; Yuce, M.R.; Lee, C. Deep learning-enabled triboelectric smart socks for IoT-based gait analysis and VR applications. Npj Flex. Electron. 2020, 4, 29.
- Peng, X.; Wang, L.; Wang, X.; Qiao, Y. Bag of visual words and fusion methods for action recognition: Comprehensive study and good practice. Comput. Vis. Image Underst. 2016, 150, 109–125.
- Khan, M.H.; Farid, M.S.; Grzegorzek, M. A comprehensive study on codebook-based feature fusion for gait recognition. Inf. Fusion 2023, 92, 216–230.
- Zhang, Y.; Huang, Y.; Wang, L.; Yu, S. A comprehensive study on gait biometrics using a joint CNN-based method. Pattern Recognit. 2019, 93, 228–236.
- Martindale, C.F.; Christlein, V.; Klumpp, P.; Eskofier, B.M. Wearables-based multi-task gait and activity segmentation using recurrent neural networks. Neurocomputing 2021, 432, 250–261.
- Sarshar, M.; Polturi, S.; Schega, L. Gait phase estimation by using LSTM in IMU-based gait analysis—Proof of concept. Sensors 2021, 21, 5749.
- Dorschky, E.; Nitschke, M.; Seifer, A.K.; van den Bogert, A.J.; Eskofier, B.M. Estimation of gait kinematics and kinetics from inertial sensor data using optimal control of musculoskeletal models. J. Biomech. 2019, 95, 109278.
- Zhong, Q.; Ali, N.; Gao, Y.; Wu, H.; Wu, X.; Sun, C.; Ma, J.; Thabane, L.; Xiao, M.; Zhou, Q.; et al. Gait kinematic and kinetic characteristics of older adults with mild cognitive impairment and subjective cognitive decline: A cross-sectional study. Front. Aging Neurosci. 2021, 13, 664558.
- Ahmad, H.N.; Barbosa, T.M. The effects of backpack carriage on gait kinematics and kinetics of schoolchildren. Sci. Rep. 2019, 9, 3364.
- Zheng, S.; Huang, K.; Tan, T. Evaluation framework on translation-invariant representation for cumulative foot pressure image. In Proceedings of the 2011 18th IEEE International Conference on Image Processing, Brussels, Belgium, 11–14 September 2011; pp. 201–204.
- McDonough, A.L.; Batavia, M.; Chen, F.C.; Kwon, S.; Ziai, J. The validity and reliability of the GAITRite system’s measurements: A preliminary evaluation. Arch. Phys. Med. Rehabil. 2001, 82, 419–425.
- Bilney, B.; Morris, M.; Webster, K. Concurrent related validity of the GAITRite® walkway system for quantification of the spatial and temporal parameters of gait. Gait Posture 2003, 17, 68–74.
- Leder, R.S.; Azcarate, G.; Savage, R.; Savage, S.; Sucar, L.E.; Reinkensmeyer, D.; Toxtli, C.; Roth, E.; Molina, A. Nintendo Wii remote for computer simulated arm and wrist therapy in stroke survivors with upper extremity hemipariesis. In Proceedings of the 2008 Virtual Rehabilitation, Vancouver, BC, Canada, 25–27 August 2008; p. 74.
- Han, Y.C.; Wong, K.I.; Murray, I. Gait phase detection for normal and abnormal gaits using IMU. IEEE Sens. J. 2019, 19, 3439–3448.
- Patel, B.; Srikanthan, S.; Asanit, F.; Agu, E. Machine learning prediction of tbi from mobility, gait and balance patterns. In Proceedings of the 2021 IEEE/ACM Conference on Connected Health: Applications, Systems and Engineering Technologies (CHASE), Washington, DC, USA, 16–18 December 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 11–22.
- Saba, T.; Mohamed, A.S.; El-Affendi, M.; Amin, J.; Sharif, M. Brain tumor detection using fusion of hand crafted and deep learning features. Cogn. Syst. Res. 2020, 59, 221–230.
- Schonberger, J.L.; Hardmeier, H.; Sattler, T.; Pollefeys, M. Comparative evaluation of hand-crafted and learned local features. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1482–1491.
- Nandy, A. Statistical methods for analysis of Parkinson’s disease gait pattern and classification. Multimed. Tools Appl. 2019, 78, 19697–19734.
- Hsu, W.C.; Sugiarto, T.; Liao, Y.Y.; Lin, Y.J.; Yang, F.C.; Hueng, D.Y.; Sun, C.T.; Chou, K.N. Can trunk acceleration differentiate stroke patient gait patterns using time-and frequency-domain features? Appl. Sci. 2021, 11, 1541.
- Huang, J.; Kaewunruen, S.; Ning, J. AI-based quantification of fitness activities using smartphones. Sustainability 2022, 14, 690.
- Sejdic, E.; Lowry, K.A.; Bellanca, J.; Redfern, M.S.; Brach, J.S. A comprehensive assessment of gait accelerometry signals in time, frequency and time-frequency domains. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 22, 603–612.
- Permatasari, J.; Connie, T.; Ong, T.S.; Teoh, A.B.J. Adaptive 1-dimensional time invariant learning for inertial sensor-based gait authentication. Neural Comput. Appl. 2023, 35, 2737–2753.
- Köping, L.; Shirahama, K.; Grzegorzek, M. A general framework for sensor-based human activity recognition. Comput. Biol. Med. 2018, 95, 248–260.
- Papadopoulos, A.; Kyritsis, K.; Klingelhoefer, L.; Bostanjopoulou, S.; Chaudhuri, K.R.; Delopoulos, A. Detecting Parkinsonian Tremor From IMU Data Collected in-the-Wild Using Deep Multiple-Instance Learning. IEEE J. Biomed. Health Inform. 2020, 24, 2559–2569.
- Liu, Z. Human Gait Phase Recognition in Embedded Sensor System. Master’s Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2021.
- Ryu, J.; McFarland, T.; Haas, C.T.; Abdel-Rahman, E. Automatic clustering of proper working postures for phases of movement. Autom. Constr. 2022, 138, 104223.
- Calvo, A.F.; Holguin, G.A.; Medeiros, H. Human activity recognition using multi-modal data fusion. In Proceedings of the Progress in Pattern Recognition, Image Analysis, Computer Vision, and Applications: 23rd Iberoamerican Congress, CIARP 2018, Madrid, Spain, 19–22 November 2018; Proceedings 23. Springer: Berlin/Heidelberg, Germany, 2019; pp. 946–953.
- Clapés, A.; Pardo, À.; Pujol Vila, O.; Escalera, S. Action detection fusing multiple Kinects and a WIMU: An application to in-home assistive technology for the elderly. Mach. Vis. Appl. 2018, 29, 765–788.
- Khan, M.H.; Farid, M.S.; Grzegorzek, M. Person identification using spatiotemporal motion characteristics. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 166–170.
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780.
- Nguyen, M.D.; Mun, K.R.; Jung, D.; Han, J.; Park, M.; Kim, J.; Kim, J. IMU-based spectrogram approach with deep convolutional neural networks for gait classification. In Proceedings of the 2020 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 4–6 January 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6.
- Tran, L.; Hoang, T.; Nguyen, T.; Kim, H.; Choi, D. Multi-model long short-term memory network for gait recognition using window-based data segment. IEEE Access 2021, 9, 23826–23839.
- Zhao, B.; Lu, H.; Chen, S.; Liu, J.; Wu, D. Convolutional neural networks for time series classification. J. Syst. Eng. Electron. 2017, 28, 162–169.
- Connor, J.T.; Martin, R.D.; Atlas, L.E. Recurrent neural networks and robust time series prediction. IEEE Trans. Neural Netw. 1994, 5, 240–254.
- Feng, Y.; Li, Y.; Luo, J. Learning effective gait features using LSTM. In Proceedings of the 2016 23rd International Conference on Pattern Recognition (ICPR), Cancun, Mexico, 4–8 December 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 325–330.
- Khan, M.H.; Farid, M.S.; Grzegorzek, M. A non-linear view transformations model for cross-view gait recognition. Neurocomputing 2020, 402, 100–111.
- Giorgi, G.; Saracino, A.; Martinelli, F. Using recurrent neural networks for continuous authentication through gait analysis. Pattern Recognit. Lett. 2021, 147, 157–163.
- Mundt, M.; Koeppe, A.; David, S.; Witter, T.; Bamer, F.; Potthast, W.; Markert, B. Estimation of gait mechanics based on simulated and measured IMU data using an artificial neural network. Front. Bioeng. Biotechnol. 2020, 8, 41.
- Alharthi, A.S.; Yunas, S.U.; Ozanyan, K.B. Deep learning for monitoring of human gait: A review. IEEE Sens. J. 2019, 19, 9575–9591.
This entry is offline, you can click here to edit this entry!