Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
The evolution of agriculture towards a modern, intelligent system is crucial for achieving sustainable development and ensuring food security. In this context, leveraging the Internet of Things (IoT) stands as a pivotal strategy to enhance both crop quantity and quality while effectively managing natural resources such as water and fertilizer.
- smart agriculture
- remote sensing
- IoT-based agriculture
- dynamic clustering
- connectivity restoration
1. Introduction
Remote sensing plays a vital role in smart agriculture. Using sensors, it collects information about soil conditions, weather conditions, humidity, and crop health, and contributes to food security and sustainable development [1,2]. Smart agriculture uses a series of equipment, such as agricultural sensors, actuators, and drones, which are connected through wireless communication. WSN is the most significant component in smart agriculture, and is used in soil analysis, weather monitoring, determining yield productivity, the early detection of disease, and crop monitoring. Figure 1 shows an example of this architecture. In these systems, agricultural sensors should cover the entire environment during network activity to fully monitor crops. Thus, network connectivity is the primary challenge in this area. Each node failure can cause the disconnection of a series of other sensors from the network, so fault tolerance in WSN-based smart agriculture is a solution for high network connectivity. Additionally, other significant challenges, such as data traffic unbalancing, energy consumption, node damping near sinks, and environment factors lead to failure in these networks [3]. All the above challenges regarding high network connectivity should be solved so they do not negatively affect the efficiency of the smart agriculture system.
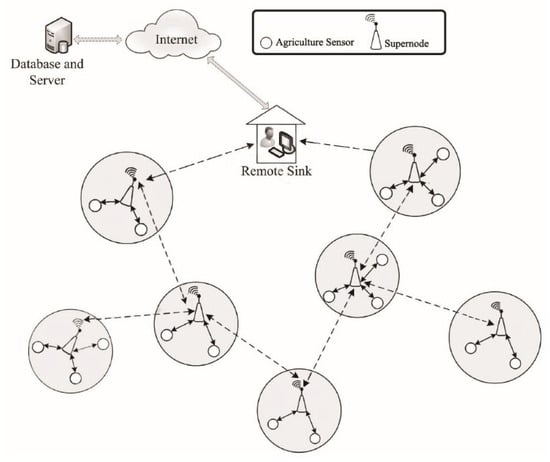
Figure 1. Smart agriculture based on heterogenous wireless sensor network.
The preceding challenges can be overcome by developing a wireless sensor and actuator network (WSAN), where supernodes serve as alternative gateways that are the core of the WSAN [4]. In addition to broader transmission ranges and more excellent batteries, supernodes perform the decision making process and make specific reactions based on their decisions. In many cases, data delivery from nodes to these supernodes is sufficient to ensure the network functions correctly [5,6]. According to [7], optimizing the placement of supernodes can extend the network lifetime by a factor of five. These networks can also be used for different purposes, e.g., recognizing combustion in agriculture [8], underground precision agriculture [9], and olive grove monitoring [10].
Studies indicate that traffic load and energy consumption distribution pose challenges for heterogeneous wireless sensor networks. Inefficient distributions result in a situation where, following the failure of the initial network node, 90% of the energy in live nodes remains unused [11]. Many studies attempted to balance the energy consumption of nodes so that they would discharge at a specific interval through different methods, e.g., by using a dynamic transmission range and adjusting the transmission range [12]. Earlier works reported that balancing energy consumption can improve the network’s lifetime by 30% since it helps balance the data traffic in the nodes adjacent to the sink [13]. Consequently, the proposed path construction method considers the residual energy of path-forming nodes as a crucial parameter, with nodes of a lower energy contributing to fewer paths.
Hotspots, or bottlenecks, are nodes that exist at a one-step distance from supernodes. Their energy discharges much more rapidly than that of other nodes since they serve as relay nodes for other nodes in addition to sending sensed data. Thus, hotspot failure is a significant challenge for sensor networks since it disconnects many nodes from supernodes [14,15,16]. Numerous studies have analyzed supernode mobility [14,15,17,18] and clustering [19,20,21,22,23,24,25] to overcome this challenge. The energy consumption of relay nodes can be balanced through supernode mobility and the periodic change of relay nodes. However, a mobile supernode imposes a new challenge on the network since a new movement and settlement change the network topology. Control messages are required to arrange a new topology to provide network coverage and connectivity. Therefore, handling the premature damping of relay nodes leads to the control message overhead in the network. Furthermore, finding optimal settlement points for a supernode is an NP-hard problem [26]. In [27], a suboptimal heuristic algorithm was assessed to find settlement points. The preceding techniques have the drawback of focusing primarily on the relay nodes while ignoring the other nodes’ energy consumption.
Agriculture sensors may fail for various reasons, such as energy discharge, hardware faults, and severe weather. This failure can disconnect a series of nodes from the network. It is essential to design fault-tolerant methods for network re-connectivity. In the disjoint path vector (DPV) method [6], each node is connected to a set of supernodes through k-disjoint paths to enable a node to select other paths to transmit the sensed data in case of node failure. DPV is aimed at reducing the total transmission range and maximum transmission range in order to lengthen the network’s lifetime. It can maintain supernode connectivity at a node failure rate of up to 5% [5,28]. In DPV, a node failure reduces k-vertex connectivity, whereas a supernode failure disconnects a large number of nodes. In [5], the adaptive disjoint path vector (ADPV) utilized r-restoration paths to maintain k-vertex connectivity. Despite improved supernode connectivity, it had two significant disadvantages: (1) the supernode layer was not fault-tolerant, and supernode failure disconnected a large number of nodes; (2) hotspots were required to be much more than k in number to avoid bottlenecks and premature death. In other words, ADPV was heavily dependent on the network structure and node locations in an operating environment.
2. Enhancing Smart Agriculture Monitoring via Connectivity Management Scheme and Dynamic Clustering Strategy
Based on the predictions, the world population will reach one billion people by 2050 [29]. This population growth requires a sustainable proportional increase in crops. Also, it is estimated that the number of people with cancer will be about 26 million by 2030 [30], and 17 million people will die from this disease. Food security is one of the ways to prevent this disease. Remote sensing plays a vital role in modern agriculture since it can effectively provide and improve food security and sustainable crop growth by monitoring the quality and quantity of crops. Moreover, the application of remote sensing, especially in its water-related contexts, has the potential to furnish sustainable resolutions for addressing the imminent challenge of irrigation water scarcity [31]. The infrastructure of these systems is wireless sensor networks. The challenges of WSN-based smart agriculture should be solved for better crop management. This section presents an overview of the recent studies on fault tolerance topology control, clustering methods, mobile supernodes, heterogeneity, and connectivity restoration.
Fault tolerance is an essential task in WSNs, ensuring uninterrupted data exchange. In recent years, many studies have been conducted on fault tolerance topology control [32,33,34,35] to reduce the residual energy consumption of nodes by adjusting the transmission power. In [36], a distributed topology control method was proposed for a WSN to change its topology dynamically through network coding. In [34], the game algorithm was employed to design a fault-tolerant topology control scheme for underwater WSNs by reducing unnecessary links and energy consumption. In [37], clustering was combined with fault tolerance to reduce energy consumption by applying fault tolerance to inter-cluster links. Fault tolerance and clustering were integrated in [38], using particle swarm optimization (PSO) to connect the members of a failed cluster to the new cluster head. These methods mainly focus on topology control and clustering to reduce node energy consumption. They ensure fault tolerance by lowering energy consumption.
Designing clustering algorithms is a method of reducing energy consumption in WSNs. Cluster head selection has been recently discussed in many studies. In [39], residual energy, node density, and node distances from sinks were integrated, and a fuzzy system was employed to calculate the probability of node selection as cluster heads. In addition to these parameters, link lifetime was considered in [40], assigning specific weights to each parameter. The residual energy had the highest weight, whereas the sink distance had the lowest weight. In [41], a PSO-based method was adopted to find the optimal cluster head by combining residual energy and sink distance to minimize the message overhead. In [42], nodes were clustered before using energy-based paths to connect clusters. In [43], the adaptive selfish optimization algorithm was utilized to select cluster heads, and the k-medoids technique was used to determine the nodes of each cluster to lengthen the network’s lifetime by preserving node energy. In [44], each UAV was considered a cluster head by default, and hierarchical clustering was employed to transmit data to UAVs. In actuality, clustering algorithms distribute network nodes over various zones; hence, cluster heads and inter-cluster routes should include fault tolerance to prevent network disconnectivity. These techniques only considered energy usage and lacked fault tolerance.
Mobile sinks are a standard method to distribute relay jobs between nodes since such mobility can periodically change the relay nodes. In [45], the main focus was on reducing the sink travel distance, and path planning was used to shorten the traveled distance of sinks. In [46], the primary purpose was to lengthen the network’s lifetime. To balance traffic load distribution, the relay nodes were periodically changed by utilizing sink movement between clusters.
In [47], mobile sinks and clustering were integrated; the sink was mounted on the cluster head with the highest traffic load in the subsequent migration. In [48], two important parameters were measured: movement time and stop time. The sink moved to the next migration at the movement time and remain there for the stop time. In [49], an ant colony optimization-based algorithm was proposed, where each node selected a data-gathering point via a random function. These data-gathering points determined the sink settlement points. In [50], a bipartite graph was created to divide sensor nodes into two sets, and the mobile sink calculated the nearest neighboring node using the breadth-first traversal algorithm once it entered each set. Then, it visited the node in the next movement. These methods focused mainly on collecting sensor data, decreasing energy consumption, and neglecting fault tolerance.
Regarding connectivity restoration in WSAN, the DPV algorithm [6] is designed to decrease the total transmission power in heterogeneous wireless sensor networks by maintaining the k-vertex disjoint paths from each sensor to a group of supernodes. Generally, this algorithm’s input is a k-vertex supernode-connected graph, and its output is a subgraph with fewer edges composed of the same collection of sensors. This method finds the edges that satisfy the following conditions:
-
Each node has a k-disjoint path to the supernode set;
-
∑𝑛𝑖=0 p𝑖 is minimized (pi is the weight of the maximum weighted edge).
ADPV [5] extends the DPV algorithm and uses the residual energy of sensor nodes to generate a fault-tolerant topology. This method improves the network’s lifetime by balancing the energy consumption of sensor nodes and involving initialization and restoration phases. In the first phase, the necessary information is collected, and the initial topology is constructed. In ADPV, whenever a node failure disrupts the connectivity of the k-vertex supernode, other k-disjoint paths are extracted for each sensor node during the restoration phase. At the end of the restoration phase, the transmission power of each node is adjusted in the generated topology. The disadvantage of the studies reviewed by [5,6] is that they considered only node failures; however, network connectivity may also be affected by supernode failures. In these methods, sensor nodes and supernodes are static; hence, they are ineffective in prolonging the network’s lifetime. The suggested approach to increasing network lifetime involves mobilizing supernodes and considering their failures.
This entry is adapted from the peer-reviewed paper 10.3390/inventions9010010
This entry is offline, you can click here to edit this entry!