Radar sensing-based devices, particularly those using Frequency-Modulated Continuous Wave (FMCW), can obtain target information such as distance, angle, moving speed, and target size, making them superior when compared to other non-contact sensing technologies. FMCW technology provides access to a lot of crucial information at an affordable price. It is well suited for different working conditions, making it highly suitable for in-vehicle detection scenarios.
- FMCW
- radar
- in-vehicle
- occupant monitoring system
- presence detection
1. Introduction
FMCW radar functions by constantly transmitting signals and capturing the resulting echo signals. The target's distance is determined by measuring the frequency variance between the transmitted and received signals. This frequency difference directly relates to the target’s information, such as distance, object size, angle, and relative motion concerning the radar.
The FMCW radar exhibits significant potential across various domains, notably in automotive, healthcare, and elderly care. Its applications extend to autonomous driving, detecting occupants and children in the car cabin, and monitoring drivers' vital signs. Additionally, it proves valuable in senior care by monitoring sleep, detecting falls, analyzing behaviors, tracking activities, and providing indoor positioning. These versatile applications underscore the FMCW radar's potential to enhance safety, enable remote monitoring, and elevate the overall quality of life in the automotive industry, health monitoring, and elderly care sectors.
The health care applications are in the massive testing verification while the automobile applications have been employed in the new vehicles. It is estimated that over 90% of road traffic accidents are caused by human error. In the United States alone, more than 30,000 people die in fatal crashes each year, a number which increased in 2020 due to the COVID-19 pandemic [1]. Tragically, there have also been incidents of people being trapped in enclosed vehicles, resulting in suffocation and heatstroke. According to survey data released by the organization KidsAndCars in 2021, nearly 1000 children died in such incidents since 1990, with 55% of these accidents caused by parents leaving their children unattended in the car [2]. Seat belts and airbags are essential fixtures inside vehicles that can protect passengers in the event of a collision and that can effectively mitigate injuries. Furthermore, adaptively adjusted seat belts and airbags can provide better protection for passengers of different types and heights [3]. In addition, the presence detection of occupants in a vehicle is now considered an indispensable functionality and will soon become an important criterion for car safety ratings, according to the 2025 European New Car Assessment Program [4]. Among the various safety functions enabled by presence detection, child presence detection (CPD) is crucial for adjusting the fitting of seat belts and airbags and for preventing unattended children from being left inside vehicles.
The data collection process of an FMCW radar involves the transmission of continuous frequency-modulated signals and the reception of reflected echoes from objects. This data is then processed to determine the position and distance of detected objects. The collected data is converted into coordinate information, which is represented as points in a three-dimensional coordinate system, forming the point cloud.
One significant method for target detection using FMCW is based on point clouds. The point cloud generated by an FMCW radar represents three-dimensional data, consisting of a collection of points. Each point contains coordinate information representing the position and distance of detected objects. Within the point cloud, each point represents an object detected by the radar system, with its x, y, and z coordinates denoting its position in space. In addition to positional information, individual points in a point cloud may also contain supplementary data such as reflectivity, intensity, or other attribute information.
2. Generate point cloud on FMCW radar
The FMCW radar front-end consists of a transmitter and receiver, as shown in Figure 1 [5].
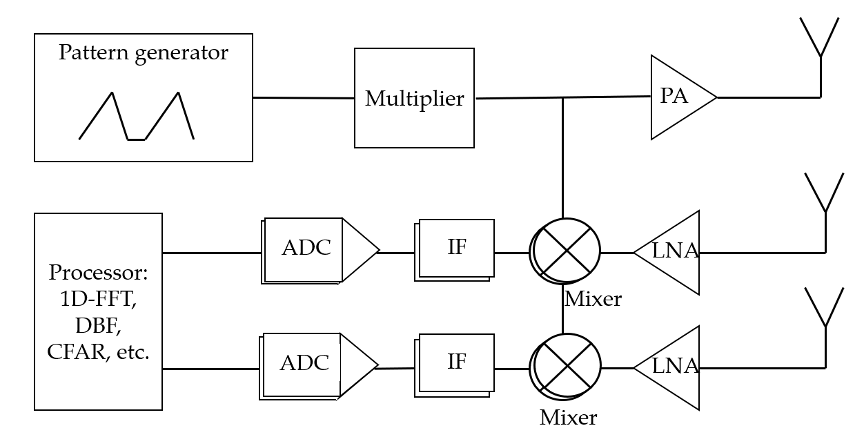
Figure 1. System block diagram of FMCW radar.
The transmit signal formula is:

After a delay of Td, the reflected signal is received, and the received signal formula is:

β is the loss factor of the signal during propagation.
The IF signal is obtained by passing the transmitted signal and the received signal through the mixer, and the carrier signal is removed. This process is also called “dechirping” or “deramping”. The deramping process produces the so-called “beat signal” at the mixer output. The signal formula after the mixer is:

The first cos function is the high-frequency part, which is filtered by a low pass filter, and the second cos function is the low-frequency part. The second cos function describes a beat signal at a fixed frequency. In Td=2*R/c, the R represents the distance from the radar to the target. According to the formula, the frequency of the IF signal is related to Td:

The distance to the target corresponds to the frequency of the IF signal.
The process of generating point cloud data is shown in Figure 2. One-dimensional FFT (1D-FFT) can be obtained by calculating the FFT after sampling by the ADC, that is, the spectral characteristics of the IF signal [5]. In FMCW radar systems, the algorithms for extracting distance, velocity, and angle estimation are all based on 1D-FFT. The distance to the target is calculated by extracting the frequency of the target in the FFT spectrum. The beamforming algorithm is also based on 1D-FFT data. The formula for an IF signal containing multiple reflected signals is:

where k represents k different reflected signals received by the receiver, Ak represents the reflected energy level of each target, and ∅k is the phase of the transmitted signal minus the phase of the received signal.
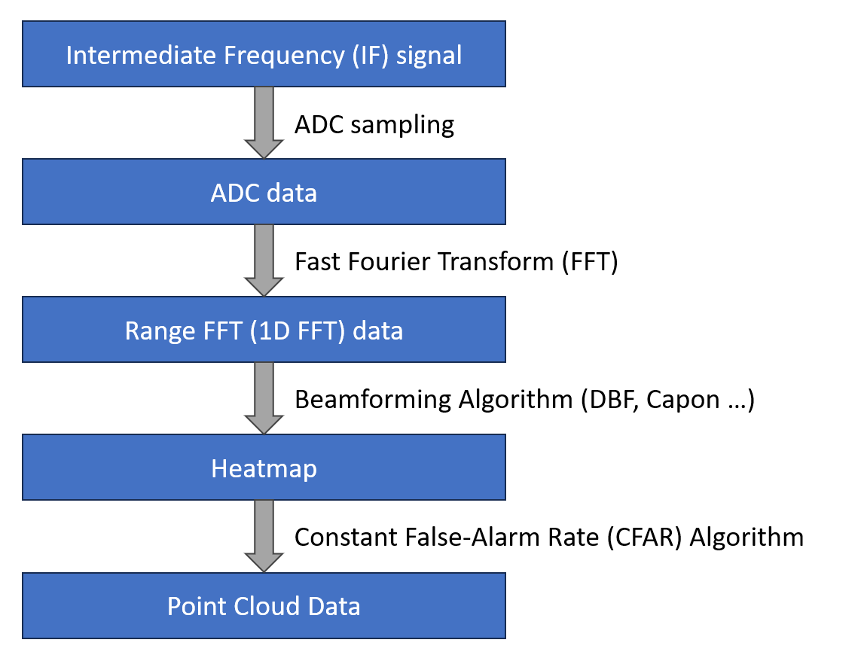
Figure 2: Point cloud data generation process
The heatmap can be obtained using the beamforming algorithm based on 1DFFT data. Radar heatmap data refers to a representation of radar-detected signals or targets' distribution. It showcases the intensity or reflection of signals at a specific spatial position. Commonly used beamforming algorithms include FFT, Capon [6], etc. However, the amount of heatmap data is very large, which is not conducive to subsequent data analysis. It is necessary to extract targets with strong reflected energy through feature extraction methods.
The Constant False Alarm (CFAR) algorithm [8] is commonly used for extracting point clouds. Its primary purpose is to maintain a constant false alarm rate, despite changing noise levels or varying target signal strengths, thus ensuring relatively stable detection performance. CFAR is an adaptive algorithm that dynamically adjusts detection thresholds based on the ambient noise level.
The basic CFAR algorithm generally falls into two types:
Cell Averaging CFAR (CA-CFAR): This method computes the average noise level using a fixed number of neighboring cells (or samples) and employs this average as the detection threshold. If the intensity of a target signal exceeds this threshold, it is identified as a potential target.
Order Statistic CFAR (OS-CFAR): This approach involves the statistical ordering of noise levels, using the median or other quantiles as the threshold. It's often more suitable for non-Gaussian distributed background noise scenarios.
Both CA-CFAR and OS-CFAR dynamically adjust thresholds to adapt to environmental changes and maintain a relatively constant false alarm rate despite fluctuations in background noise levels, enhancing the accuracy and reliability of target detection. The CFAR algorithm is widely used in radar systems for detecting, tracking, and processing signals. It provides reliable target identification while minimizing false alarms.
The point cloud generated by FMCW radar provides crucial information about object positions and distances, playing a vital role in target detection, environment modeling, obstacle avoidance, navigation, 3D reconstruction, and visualization across various applications. The point cloud data serves as essential information for machine learning, computer vision, and automated systems, enabling the identification, analysis, and understanding of objects and structures within an environment.
References
- National Highway Traffic Safety Administration (NHTSA). Motor Vehicle Crash Data Querying and Reporting. Available online: https://cdan.dot.gov/SASStoredProcess/guest (accessed on 24 September 2021).
- Child Hot Car Deaths Data Analysis. Available online: https://www.kidsandcars.org/wp-content/uploads/2020/07/Child-Hot-Car-Deaths-Data-Analysis.pdf (accessed on 5 October 2021).
- Sun, Z.; Chen, S.-K. Automotive Active Safety Systems [Introduction to the special section]. IEEE Control Syst. 2010, 30, 36–37.
- Leuven, B. Euro NCAP 2025 Roadmap. Available online: https://cdn.euroncap.com/media/30700/euroncap-roadmap-2025-v4.pdf (accessed on 3 October 2020).
- Yunlong Luo, Lidong Chi, Alex Qi, Jianhua Ma, Yihong Qi. Requirement Analysis and Teardrop-Based Design of High Antenna Isolation for FMCW Radar. Electronics, 11, 1687, 2022.
- Lei Gong, Yunlong Luo, Yihong Qi and Miao Miao. High Accuracy Range Detection Based on FMCW Radar Spectrum Refinement, 2022 IEEE 8th International Conference on Computer and Communications (ICCC), Chengdu, China, 2022, pp. 199-203.
- Capon, J. High-resolution frequency-wavenumber spectrum analysis. Proc. IEEE 1969, 57, 1408–1418.
- Gandhi, P.P.; Kassam, S.A. Analysis of CFAR processors in nonhomogeneous background. IEEE Trans. Aerosp. Electron. Syst. 1988, 24, 427–445.
This entry is adapted from the peer-reviewed paper 10.3390/technologies11020039