Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
在弱光条件下检测行人具有挑战性,尤其是在可穿戴平台的背景下。红外摄像机已被用于增强检测能力,而低光摄像机则捕捉行人更复杂的特征。考虑到这一点,我们引入了一个低光行人检测数据集(称为HRBUST-LLPED),通过使用可穿戴的低光摄像头捕获校园内的行人数据。大部分数据是在星光级照明下收集的。
- wearable devices
- low-light pedestrian detection dataset
1. 引言
在过去的二十年中,物联网和人工智能技术取得了重大进步。因此,研究人员将注意力转向开发由可穿戴摄像头、传感器、计算组件和机器学习模型组成的智能可穿戴辅助系统[1]。这导致了旨在帮助各个领域的视障人士的研究的增加,例如旅行[2]、食物[3]和屏幕检测[4]。其他研究领域包括人与宠物[5]或人与机器[6,7]的交互。可穿戴设备与计算机视觉模型相结合,被用于帮助用户观察通常难以看到的事物。尽管使用可穿戴设备进行物体检测的研究很多,但对场景中的人进行检测的研究仍然有限,因此在夜间监控、消防救援和森林检查等领域应用具有挑战性。
自2012年卷积神经网络成熟以来,目标检测算法经历了蓬勃发展[8]。提出了以SSD [9]和YOLO [10]为代表的单阶段目标检测模型,以及以Faster R-CNN [11]和FPN [12] 为代表的两阶段目标检测模型,在速度和精度方面取得了优异的成绩。目标检测算法的成熟也让行人检测算法进入了深度学习时代。为了满足机器学习和深度学习模型的训练数据需求,人们提出了一些常用的行人检测数据集,如Caltech[13]和KITTI [14]。近年来,使用车载摄像头或监控摄像头从城市、乡村和更广泛的环境中收集了 CityPersons [15]、CrowdHuman [16]、WIDER Pedestrian、WiderPerson [17]、EuroCity [18] 和 TJU-Pedestrian [19] 等数据集。这些数据集使经过训练的模型能够适应更广泛的场景。EuroCity和TJU-Pedestrian数据集还包含低照度条件下的行人数据,旨在实现夜间场景下行人检测模型的良好识别性能。然而,传统相机在弱光条件下难以捕捉到清晰的图像,这极大地影响了数据标注和模型识别性能,如图 1a 所示。
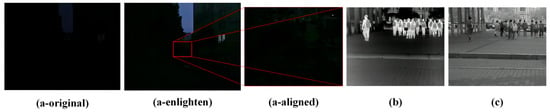
图 1.在星光级照明环境中,可见光相机、红外相机、低照度相机的成像效果如下:(a-original)表示用手机直接拍摄的图像;(a-enlighten) 表示使用 Zero DCE++ 模型增强的图像;(A-aligned)表示具有相应分辨率的增强版本中的图像。(b) 表示使用红外相机拍摄的图像,以及 (c) 表示使用低照度相机拍摄的图像。
人类会散发热量,在较冷的环境下可以使用红外摄像机将其捕获,以将行人与背景区分开来,如图 1b 所示。因此,OSU [20]提出了一个在白天收集的红外数据集,TNO [21]也提供了一个结合了夜间捕获的红外和可见光的数据集。后来,随着自动驾驶研究的发展,CVC-14 [22]、KAIST [23]和FLIR等数据集被引入,这些数据集由使用车载可见光-红外热像仪捕获的行人数据组成,用于模态对齐。随后,引入LLVIP数据集[24],推进弱光条件下多光谱融合和行人检测的研究。虽然红外图像可以将个人与背景分开,但它们的成像距离有限,并且包含的细节较少,因此很难区分重叠度高的行人。
采用CMOS芯片专门设计用于捕捉长波长光波的低照度相机,可以在星光级照明条件下实现精确成像,如图1c所示。
2. 可穿戴式弱光行人检测基准数据集
2.1. 行人检测数据集
第一个用于行人检测的数据集是麻省理工学院[25],该数据集于2000年提出,其图像分辨率仅为128×64128×64。在随后的几年中,INRIA [26]、戴姆勒 [27] 和 TUD-Brussels [28] 数据集相继推出,图像分辨率提高到 640×480 640×480 和图像数量不等,从数百到数万不等。手动设计的特征是这些早期数据集的特征。
然而,随着神经网络和深度学习的发展,早期的行人检测数据集太小,无法为模型拟合提供足够的数据。2010年,加州理工学院[13]数据集被提出,该数据集由11个视频组成。训练集包括六个视频,每三帧选择一次,而测试集包括五个视频,每 30 帧选择一次。随后,在2012年,引入了KITTI [14]数据集,该数据集是从车载行车记录仪中收集的。训练集包含7481张图像,测试集包含7518张图像,分辨率为1240×3761240×376。CityPersons[15]源自2017年的Cityscapes[29]数据集,包括训练集2975张图像、验证集500张图像和测试集1575张图像,分辨率为2048×1024 2048×1024。2018年推出的CrowdHuman[16]在图像中标注了完整的行人,并标记了每个行人的可见部位和头部。2019 年的数据集 WIDER Pedestrian 专注于车辆和行人检测,主要从路边监控和车载摄像头中提取图像。WiderPerson[17]于2019年提出,主要关注户外场景而非交通场景下的行人检测,数据主要来自网络来源。EuroCity [18] 数据集于 2019 年推出,从欧洲多个城市捕获了各种照明条件下(包括白天和夜间)的行人数据,使其成为第一个全天候行人检测数据集。天津大学于2020年提出的行人检测数据集TJU-Pedestrian [19],涵盖了道路交通和校园两个主要场景,由白天和黑夜的行人数据组成。它是目前最全面的行人检测数据集之一。
上述所有行人检测数据集都是使用可见光相机捕获的。然而,使用传统的可见光摄像机在弱光场景中清晰捕捉行人具有挑战性。2015年,KAIST数据集[23]推出了第一个包括红外和可见光模式的行人检测数据集,考虑了可能影响自动化系统性能的昼夜照明变化。KAIST 数据集主要提供 12 对完全对齐的可见光和红外视频,其中 6 对用于训练,6 对用于测试。CVC-14数据集[22]于2016年提出,是同时收集可见光和红外图像的数据集,主要针对自动驾驶场景。它由 7085 张训练图像和 1433 张测试图像组成,分辨率为 640×512 640×512。该数据集的缺点之一是可见光和红外模态之间缺乏完全对齐。2018年推出的FLIR热数据集主要包含9711张红外图像和9233张RGB图像,用于模型训练和验证。它旨在促进FLIR红外热像仪在自动驾驶系统中的使用。LLVIP数据集[24]于2022年提出,构建了一个与可见光和红外图像相对应的数据集。它主要用于图像融合、行人检测和模态传输任务。
2.2. 目标检测
目标检测模型的开发基于AlexNet和VGGNet的成功。早期的目标检测模型可分为两类:两阶段模型和一阶段模型。
两阶段模型的开创性工作是2014年的R-CNN [30]模型,这也是第一个基于深度学习的目标检测模型。两阶段目标检测模型的主要思想是通过卷积提取图像特征后,选择可能包含对象的粗略感兴趣区域,然后从对齐的感兴趣区域对特定对象进行分类。随后,Fast R-CNN [31] 和 Faster R-CNN [11] 改进了对象选择过程,降低了计算成本,并实现了整个网络的端到端训练。为了更好地检测多尺度目标,将MS-CNN [32]和FPN [12]引入到两阶段目标检测算法中,提高了其对复杂场景的精度和适应性。
一阶段目标检测模型直接将提取的特征图划分为N×N个区域,以预测每个区域的目标,无需预测感兴趣区域,提高了目标检测模型的速度。该类别中的流行型号是 YOLO [10] 和 SSD [9],YOLO 已从 YOLOv1 发展到 YOLOv8。尽管YOLOv1 [10]通过直接回归边界框的位置来降低计算复杂度,但它在检测密集和小物体方面并不有效。YOLOv2[33]和YOLOv3[34]在此基础上进行了改进,并结合了PassThrough方法、锚点和FPN来预测多尺度目标。YOLOv4 [35] 和 YOLOv5 [36] 通过集成 CSP 和 SPP 结构、自适应锚点计算和 Focus 操作进一步提高了性能。YOLOv6 [37] 和 YOLOv7 [38] 分别引入了 RepVGG 和 ELAN 模块来提高性能,而 YOLOv8 改进了 CSP 结构、预测头和损失函数,以进一步提高计算速度和精度。
2.3. 可穿戴设备上的目标检测
基于数据来源,可穿戴设备目标检测模型的研究大致可分为两类:基于日常生活图像的智能辅助设备和基于AR平台的辅助设备。
在基于AR的研究中,Eckert等[39]将HoloLens与YOLOv2相结合,设计了一种辅助系统,为视障人士提供音频导航。Bahri等[40]在HoloLens平台上部署并评估了YOLOv3和Faster R-CNN。Park等[41]利用Mask R-CNN模型在AR设备中实现对象分割,并评价了其在智能制造中物品匹配、检测和维护中的应用。Park等[6]采用RetinaNet进行目标检测,并以AR技术为平台,为协作机器人提供智能辅助。Dimitropoulos等[7]利用AR和深度学习进行可穿戴设备识别,通过语音或手势实现人类操作员和机器人之间的交互。
在基于日常生活图像的研究中,Han等[3]使用Faster R-CNN进行食物物体检测,将其作为可穿戴设备在眼镜中实现,并在估计咀嚼动作次数的同时自动捕捉就餐场景的图像。Kim等[5]利用可穿戴设备识别和预测狗的行为,并评估了Faster R-CNN和YOLOv3/v4的性能。Li等[4]采用可穿戴传感器和YOLOv5模型检测电子屏幕,评估电子屏幕的使用时间。Arifando等[42]提出了一种基于YOLOv5的轻量级高精度公交车检测模型,帮助视障人士登上正确的公交车并在正确的公交车站下车。Maya-Martínez等[43]介绍了一种基于Tiny YOLOv3的行人检测架构,该架构在低成本可穿戴设备中实现,作为辅助视障人士的替代解决方案。尽管这些研究为使用可穿戴设备检测行人提供了良好的基础,但它们并未考虑夜间弱光下的行人检测。
This entry is adapted from the peer-reviewed paper 10.3390/mi14122164
This entry is offline, you can click here to edit this entry!