Bio-mechatronics is an interdisciplinary scientific field that emphasizes the integration of biology and mechatronics to discover innovative solutions for numerous biomedical applications. The broad application spectrum of bio-mechatronics consists of minimally invasive surgeries, rehabilitation, development of prosthetics, and soft wearables to find engineering solutions for the human body. Fiber-optic-based sensors have become an indispensable part of bio-mechatronics systems, which are essential for position detection and control, monitoring measurements, compliance control, and various feedback applications.
- bio-mechatronics
- fiber-optical sensors
- force myography
- polymer optical fiber
- optical tactile sensors
1. Introduction
2. Fiber-Bragg-Grating-Based Instrumentation
2.1. Minimally Invasive Surgeries (MISs)
2.2. Fiber-Bragg-Grating-Instrumented Rehabilitation
2.3. Fiber Bragg Gratings for Prostheses
3. Force-Myography-Based Sensors
3.1. Measuring Muscular Contraction
3.2. FMGs in Posture Detection
3.3. Force Myography Sensors in Human–Robot Interaction
4. Polymer Optical Fiber Sensors
4.1. Polymer Optical Fiber Sensors in Rehabilitation
4.2. Polymer Optical Fiber Sensors for Gait Analysis
4.3. Polymer Optical Fiber Sensors in Health Monitoring
5. Optical Tactile Sensors
5.1. Tissue Distinction and Discontinuity Detection in Minimally Invasive Surgeries
5.2. Learning-Based Nonlinear Calibration for Miniaturized Optical Force Sensors
6. Fabry–Perot Interferometry Fiber Sensor
6.1. FPI Sensor Fabrication Methods Using Fabry–Perot Interferometers
6.2. Sensing Applications of Fabry–Perot Interferometers
6.3. Phantom Study of a Fiber Optic Force Sensor Design for Biopsy Needles under Magnetic Resonance Imaging
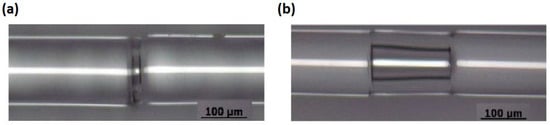
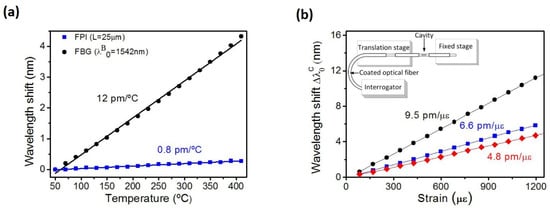
6.4. In-fiber Fabry–Perot Interferometer for Strain and Magnetic Field Sensing
| Fiber-Optic Sensor Type | Key Features | Limitations | Typical Applications | References |
|---|---|---|---|---|
| FBG | High sensitivity, compact design | High cost, design complexity | Strain detection, prosthetics | [14][15][16][17][18][19][20][21][22][23][24][25][26][27][28][29][30][31][32][108] |
| FMG | Accurate limb movement monitoring | Requires further wearable development | Rehabilitation, human–robot interaction | [33][34][35][36][37][38][39][41] |
| POF | High elastic strain limits, flexibility | Material attenuation, biocompatibility | Gait analysis, sleep monitoring | [42][43][44][45][46][47][49][50][51] |
| Optical Tactile Sensor |
Improved resolution and sensitivity | Limited hospital adoption | Robotics-assisted minimally invasive surgery | [56][57][58][60][61][62][63][64][65] |
| FPI | Measures various physical parameters | Further development is needed for prosthetic limbs | Biomedical applications, real-time monitoring | [81][82][84][85][86][87][88][89][91][92][93][94][100][101][102][103][104][105][106][107] |
7. Conclusions and Future Perspectives
This entry is adapted from the peer-reviewed paper 10.3390/technologies11060157
References
- Li, Z.; Yang, C.; Burdet, E. Guest Editorial An Overview of Biomedical Robotics and Bio-Mechatronics Systems and Applications. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 869–874.
- Biomedical Requirements for Human Machine Interface towards Building a Humanoid: A Review|IEEE Conference Publication|IEEE Xplore. Available online: https://ieeexplore.ieee.org/abstract/document/9030298/ (accessed on 4 October 2022).
- Wang, H.; Guo, J.-K.; Mo, H.; Zhou, X.; Han, Y. Fiber Optic Sensing Technology and Vision Sensing Technology for Structural Health Monitoring. Sensors 2023, 23, 4334.
- Lechler, K.; Frossard, B.; Whelan, L.; Langlois, D.; Müller, R.; Kristjansson, K. Motorized Biomechatronic Upper and Lower Limb Prostheses—Clinically Relevant Outcomes. PMR 2018, 10, S207–S219.
- Mak, Y.X.; Lanciano, A.; Stramigioli, S.; Abayazid, M. Development of Haptic Approaches for a Head-Controlled Soft Robotic Endoscope. In Proceedings of the 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), New York, NY, USA, 29 November–1 December 2020; pp. 1216–1222.
- Su, H.; Yang, C.; Ferrigno, G.; De Momi, E. Improved Human–Robot Collaborative Control of Redundant Robot for Teleoperated Minimally Invasive Surgery. IEEE Robot. Autom. Lett. 2019, 4, 1447–1453.
- Adaptable Robotic Platform for Gait Rehabilitation and Assistance: Design Concepts and Applications | SpringerLink. Available online: https://link.springer.com/chapter/10.1007/978-981-15-4732-4_5 (accessed on 5 October 2022).
- D’Alvia, L.; Pittella, E.; Fioriello, F.; Maugeri, A.; Rizzuto, E.; Piuzzi, E.; Sogos, C.; Del Prete, Z. Heart Rate Monitoring under Stress Condition during Behavioral Analysis in Children with Neurodevelopmental Disorders. In Proceedings of the 2020 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Bari, Italy, 1 June–1 July 2020; pp. 1–6.
- Gibbs, P.T.; Asada, H. Wearable Conductive Fiber Sensors for Multi-Axis Human Joint Angle Measurements. J. NeuroEng. Rehabil. 2005, 2, 7.
- Vilela, D.; Romeo, A.; Sánchez, S. Flexible Sensors for Biomedical Technology. Lab Chip 2016, 16, 402–408.
- Luo, L.; Liu, Z. Recent Progress in Organic Field-Effect Transistor-Based Chem/Bio-Sensors. VIEW 2022, 3, 20200115.
- Zhou, Y.; Lian, H.; Li, Z.; Yin, L.; Ji, Q.; Li, K.; Qi, F.; Huang, Y. Crack Engineering Boosts the Performance of Flexible Sensors. VIEW 2022, 3, 20220025.
- Review of Femtosecond-Laser-Inscribed Fiber Bragg Gratings: Fabrication Technologies and Sensing Applications | Photonic Sensors. Available online: https://link.springer.com/article/10.1007/s13320-021-0629-2 (accessed on 13 October 2023).
- Kang, L.-H.; Kim, D.-K.; Han, J.-H. Estimation of Dynamic Structural Displacements Using Fiber Bragg Grating Strain Sensors. J. Sound Vib. 2007, 305, 534–542.
- Tosi, D. Review and Analysis of Peak Tracking Techniques for Fiber Bragg Grating Sensors. Sensors 2017, 17, 2368.
- Tosi, D. Review of Chirped Fiber Bragg Grating (CFBG) Fiber-Optic Sensors and Their Applications. Sensors 2018, 18, 2147.
- Lv, C.; Wang, S.; Shi, C. A High-Precision and Miniature Fiber Bragg Grating-Based Force Sensor for Tissue Palpation During Minimally Invasive Surgery. Ann. Biomed. Eng. 2020, 48, 669–681.
- Yurkewich, D.S.; Escoto, A.; Trejos, A.L.; LeBel, M.-E.; Patel, R.V.; Naish, M.D. Low-Cost Force-Sensing Arthroscopic Tool Using Threaded Fiber Bragg Grating Sensors. In Proceedings of the 5th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, Sao Paulo, Brazil, 12–15 August 2014; pp. 28–33.
- Bandari, N.; Dargahi, J.; Packirisamy, M. Tactile Sensors for Minimally Invasive Surgery: A Review of the State-of-the-Art, Applications, and Perspectives. IEEE Access 2020, 8, 7682–7708.
- Konstantinova, J.; Jiang, A.; Althoefer, K.; Dasgupta, P.; Nanayakkara, T. Implementation of Tactile Sensing for Palpation in Robot-Assisted Minimally Invasive Surgery: A Review. IEEE Sens. J. 2014, 14, 2490–2501.
- Zarrin, P.S.; Escoto, A.; Xu, R.; Patel, R.V.; Naish, M.D.; Trejos, A.L. Development of an Optical Fiber-Based Sensor for Grasping and Axial Force Sensing. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May 2017–3 June 2017; pp. 939–944.
- Lim, S.-C.; Lee, H.-K.; Park, J. Role of Combined Tactile and Kinesthetic Feedback in Minimally Invasive Surgery: Haptic Feedback in Minimmaly Invasive Surgery. Int. J. Med. Robot. Comput. Assist. Surg. 2015, 11, 360–374.
- Okamura, A.M. Haptics in Robot-Assisted Minimally Invasive Surgery. In The Encyclopedia of Medical Robotics; World Scientific: Singapore, 2018; pp. 317–339. ISBN 978-981-323-225-9.
- Trejos, A.L.; Patel, R.V.; Naish, M.D. Force Sensing and Its Application in Minimally Invasive Surgery and Therapy: A Survey. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2010, 224, 1435–1454.
- de Fátima Domingues, M.; Tavares, C.; Leite, T.; Alberto, N.; Leitão, C.; Marques, C.; Radwan, A.; Rocon, E.; Antunes, P.; André, P. Fiber Bragg Gratings as E-Health Enablers: An Overview for Gait Analysis Applications. In Applications of Optical Fibers for Sensing; IntechOpen: London, UK, 2018; ISBN 978-1-78985-352-0.
- Rocha, R.P.; Silva, A.F.; Carmo, J.P.; Correia, J.H. FBG in PVC Foils for Monitoring the Knee Joint Movement during the Rehabilitation Process. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 458–461.
- Cheng-Yu, H.; Ahmed Abro, Z.; Yi-Fan, Z.; Ahmed Lakho, R. An FBG-Based Smart Wearable Ring Fabricated Using FDM for Monitoring Body Joint Motion. J. Ind. Text. 2021, 50, 1660–1673.
- Bimis, A.; Karalekas, D.; Bouropoulos, N.; Mouzakis, D.; Zaoutsos, S. Monitoring of Hardening and Hygroscopic Induced Strains in a Calcium Phosphate Bone Cement Using FBG Sensor. J. Mech. Behav. Biomed. Mater. 2016, 60, 195–202.
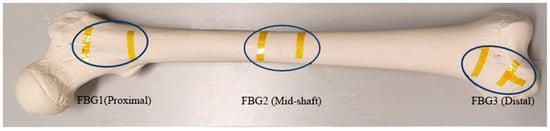
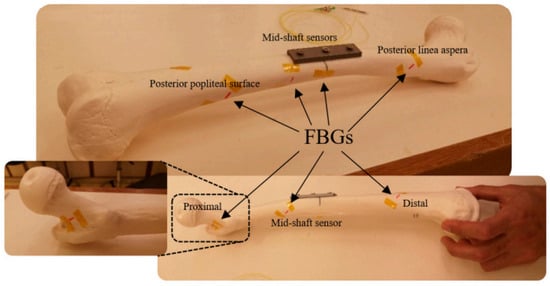
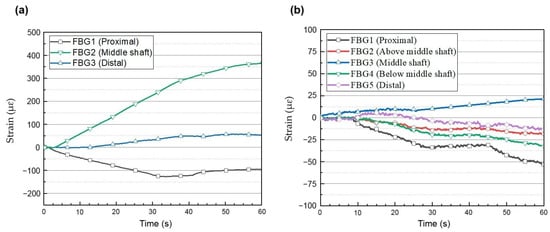
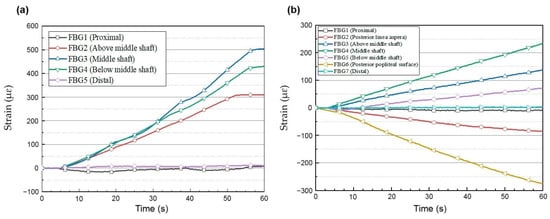
- Najafzadeh, A.; Serandi Gunawardena, D.; Liu, Z.; Tran, T.; Tam, H.-Y.; Fu, J.; Chen, B.K. Application of Fibre Bragg Grating Sensors in Strain Monitoring and Fracture Recovery of Human Femur Bone. Bioengineering 2020, 7, 98.
- Das, N.; Nagpal, N.; Bankura, S.S. A Review on the Advancements in the Field of Upper Limb Prosthesis. J. Med. Eng. Technol. 2018, 42, 532–545.
- Madusanka, D.G.K.; Wijayasingha, L.N.S.; Gopura, R.A.R.C.; Amarasinghe, Y.W.R.; Mann, G.K.I. A Review on Hybrid Myoelectric Control Systems for Upper Limb Prosthesis. In Proceedings of the 2015 Moratuwa Engineering Research Conference (MERCon), Moratuwa, Sri Lanka, 7–8 April 2015; pp. 136–141.
- Galvao, J.R.; Zamarreno, C.R.; Martelli, C.; Cardozo Da Silva, J.C.; Arregui, F.J.; Matias, I.R. Strain Mapping in Carbon-Fiber Prosthesis Using Optical Fiber Sensors. IEEE Sens. J. 2017, 17, 3–4.
- Xiao, Z.G.; Menon, C. A Review of Force Myography Research and Development. Sensors 2019, 19, 4557.
- Fujiwara, E.; Wu, Y.T.; Santos, M.F.M.; Schenkel, E.A.; Suzuki, C.K. Development of an Optical Fiber FMG Sensor for the Assessment of Hand Movements and Forces. In Proceedings of the 2015 IEEE International Conference on Mechatronics (ICM), Nagoya, Japan, 6–8 March 2015; pp. 176–181.
- Cho, E.; Chen, R.; Merhi, L.-K.; Xiao, Z.; Pousett, B.; Menon, C. Force Myography to Control Robotic Upper Extremity Prostheses: A Feasibility Study. Front. Bioeng. Biotechnol. 2016, 4, 18.
- Sakr, M.; Menon, C. Exploratory Evaluation of the Force Myography (FMG) Signals Usage for Admittance Control of a Linear Actuator. In Proceedings of the 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; pp. 903–908.
- Delva, M.L.; Lajoie, K.; Khoshnam, M.; Menon, C. Wrist-Worn Wearables Based on Force Myography: On the Significance of User Anthropometry. BioMed. Eng. OnLine 2020, 19, 46.
- Prakash, A.; Sharma, N.; Sharma, S. Novel Force Myography Sensor to Measure Muscle Contractions for Controlling Hand Prostheses. Instrum. Sci. Technol. 2020, 48, 43–62.
- Fujiwara, E.; Wu, Y.T.; Suzuki, C.K.; de Andrade, D.T.G.; Neto, A.R.; Rohmer, E. Optical Fiber Force Myography Sensor for Applications in Prosthetic Hand Control. In Proceedings of the 2018 IEEE 15th International Workshop on Advanced Motion Control (AMC), Tokyo, Japan, 9–11 March 2018; pp. 342–347.
- Multimodal Human–Computer Interaction: A Survey—ScienceDirect. Available online: https://www.sciencedirect.com/science/article/abs/pii/S1077314206002335 (accessed on 13 October 2023).
- Anvaripour, M.; Saif, M. Collision Detection for Human-Robot Interaction in an Industrial Setting Using Force Myography and a Deep Learning Approach. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 2149–2154.
- Johny, J.; Amos, S.; Prabhu, R. Optical Fibre-Based Sensors for Oil and Gas Applications. Sensors 2021, 21, 6047.
- Biomedical Application of Optical Fibre Sensors—IOPscience. Available online: https://iopscience.iop.org/article/10.1088/2040-8986/aac68d/meta (accessed on 29 September 2022).
- In-Ground Optical Fibre Bragg Grating Pressure Switch for Security Applications. Available online: https://www.spiedigitallibrary.org/conference-proceedings-of-spie/8351/83510N/In-ground-optical-fibre-Bragg-grating-pressure-switch-for-security/10.1117/12.914446.short?SSO=1 (accessed on 29 September 2022).
- Cennamo, N.; Zeni, L. Polymer Optical Fibers for Sensing. Macromol. Symp. 2020, 389, 1900074.
- Castrellon-Uribe, J. Optical Fiber Sensors: An Overview. In Fiber Optic Sensors; IntechOpen: London, UK, 2012; ISBN 978-953-307-922-6.
- Leal-Junior, A.G.; Diaz, C.A.R.; Avellar, L.M.; Pontes, M.J.; Marques, C.; Frizera, A. Polymer Optical Fiber Sensors in Healthcare Applications: A Comprehensive Review. Sensors 2019, 19, 3156.
- Ahmed, I.; Ali, M.; Elsherif, M.; Butt, H. UV Polymerization Fabrication Method for Polymer Composite Based Optical Fiber Sensors. Sci. Rep. 2023, 13, 10823.
- Leal-Junior, A.G.; Frizera, A.; Marques, C.; Sánchez, M.R.A.; Botelho, T.R.; Segatto, M.V.; Pontes, M.J. Polymer Optical Fiber Strain Gauge for Human-Robot Interaction Forces Assessment on an Active Knee Orthosis. Opt. Fiber Technol. 2018, 41, 205–211.
- Leal-Junior, A.G.; Frizera, A.; Avellar, L.M.; Marques, C.; Pontes, M.J. Polymer Optical Fiber for In-Shoe Monitoring of Ground Reaction Forces During the Gait. IEEE Sens. J. 2018, 18, 2362–2368.
- Han, P.; Li, L.; Zhang, H.; Guan, L.; Marques, C.; Savović, S.; Ortega, B.; Min, R.; Li, X. Low-Cost Plastic Optical Fiber Sensor Embedded in Mattress for Sleep Performance Monitoring. Opt. Fiber Technol. 2021, 64, 102541.
- Muhammad, H.B.; Recchiuto, C.; Oddo, C.M.; Beccai, L.; Anthony, C.J.; Adams, M.J.; Carrozza, M.C.; Ward, M.C.L. A Capacitive Tactile Sensor Array for Surface Texture Discrimination. Microelectron. Eng. 2011, 88, 1811–1813.
- Göger, D.; Gorges, N.; Wörn, H. Tactile Sensing for an Anthropomorphic Robotic Hand: Hardware and Signal Processing. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 2972–2978.
- Stassi, S.; Cauda, V.; Canavese, G.; Pirri, C.F. Flexible Tactile Sensing Based on Piezoresistive Composites: A Review. Sensors 2014, 14, 5296–5332.
- Zhang, T.; Liu, H.; Jiang, L.; Fan, S.; Yang, J. Development of a Flexible 3-D Tactile Sensor System for Anthropomorphic Artificial Hand. IEEE Sens. J. 2013, 13, 510–518.
- Ward-Cherrier, B.; Pestell, N.; Cramphorn, L.; Winstone, B.; Giannaccini, M.E.; Rossiter, J.; Lepora, N.F. The TacTip Family: Soft Optical Tactile Sensors with 3D-Printed Biomimetic Morphologies. Soft Robot. 2018, 5, 216–227.
- Yuan, W.; Dong, S.; Adelson, E.H. GelSight: High-Resolution Robot Tactile Sensors for Estimating Geometry and Force. Sensors 2017, 17, 2762.
- Macdonald, F.L.A.; Lepora, N.F.; Conradt, J.; Ward-Cherrier, B. Neuromorphic Tactile Edge Orientation Classification in an Unsupervised Spiking Neural Network. Sensors 2022, 22, 6998.
- Othman, W.; Lai, Z.-H.A.; Abril, C.; Barajas-Gamboa, J.S.; Corcelles, R.; Kroh, M.; Qasaimeh, M.A. Tactile Sensing for Minimally Invasive Surgery: Conventional Methods and Potential Emerging Tactile Technologies. Front. Robot. AI 2022, 8, 705662.
- Leal Ghezzi, T.; Campos Corleta, O. 30 Years of Robotic Surgery. World J. Surg. 2016, 40, 2550–2557.
- Vyas, D.; Cronin, S. Peer Review and Surgical Innovation: Robotic Surgery and Its Hurdles. Am. J. Robot. Surg. 2015, 2, 39–44.
- Ehrampoosh, A.; Shirinzadeh, B.; Pinskier, J.; Smith, J.; Moshinsky, R.; Zhong, Y. A Force-Feedback Methodology for Teleoperated Suturing Task in Robotic-Assisted Minimally Invasive Surgery. Sensors 2022, 22, 7829.
- Krebs, T.F.; Schnorr, I.; Heye, P.; Häcker, F.-M. Robotically Assisted Surgery in Children—A Perspective. Children 2022, 9, 839.
- Lu, X.; Wang, C.; Jin, X.; Li, J. A Flexible Surgical Instrument for Robot-Assisted Minimally Invasive Surgery. Actuators 2022, 11, 206.
- Bandari, N.M.; Ahmadi, R.; Hooshiar, A.; Dargahi, J.; Packirisamy, M. Hybrid Piezoresistive-Optical Tactile Sensor for Simultaneous Measurement of Tissue Stiffness and Detection of Tissue Discontinuity in Robot-Assisted Minimally Invasive Surgery. J. Biomed. Opt. 2017, 22, 77002.
- Zhu, W.; Yang, S.; Zheng, H.; Zhan, Y.; Li, D.; Cen, G.; Tang, J.; Lu, H.; Zhang, J.; Zhao, Z.; et al. Gold Enhanced Graphene-Based Photodetector on Optical Fiber with Ultrasensitivity over Near-Infrared Bands. Nanomaterials 2022, 12, 124.
- Hortamani, R.; Zabihollah, A. Modeling and Simulation of Graspers Force in Minimally Invasive Surgery. In Proceedings of the 2009 International Association of Computer Science and Information Technology—Spring Conference, Singapore, 17–20 April 2009; pp. 475–479.
- Abiri, A.; Pensa, J.; Tao, A.; Ma, J.; Juo, Y.-Y.; Askari, S.J.; Bisley, J.; Rosen, J.; Dutson, E.P.; Grundfest, W.S. Multi-Modal Haptic Feedback for Grip Force Reduction in Robotic Surgery. Sci. Rep. 2019, 9, 5016.
- Waters, I.; Jones, D.; Alazmani, A.; Culmer, P. Encouraging and Detecting Preferential Incipient Slip for Use in Slip Prevention in Robot-Assisted Surgery. Sensors 2022, 22, 7956.
- Deng, Z.; Jonetzko, Y.; Zhang, L.; Zhang, J. Grasping Force Control of Multi-Fingered Robotic Hands through Tactile Sensing for Object Stabilization. Sensors 2020, 20, 1050.
- Huang, C.; Wang, Q.; Zhao, M.; Chen, C.; Pan, S.; Yuan, M. Tactile Perception Technologies and Their Applications in Minimally Invasive Surgery: A Review. Front. Physiol. 2020, 11, 611596.
- Bandari, N.; Dargahi, J.; Packirisamy, M. Miniaturized Optical Force Sensor for Minimally Invasive Surgery With Learning-Based Nonlinear Calibration. IEEE Sens. J. 2020, 20, 3579–3592.
- Gauthier, R.C.; Ross, C. Theoretical and Experimental Considerations for a Single-Mode Fiber-Optic Bend-Type Sensor. Appl. Opt. 1997, 36, 6264–6273.
- Zendehnam, A.; Mirzaei, M.; Farashiani, A.; Farahani, L. Investigation of Bending Loss in a Single-Mode Optical Fibre. Pramana-J. Phys. 2010, 74, 591–603.
- Savović, S.; Djordjevich, A.; Savović, I. Theoretical Investigation of Bending Loss in Step-Index Plastic Optical Fibers. Opt. Commun. 2020, 475, 126200.
- Quiño, J.; Confesor, M. Power Loss Due to Macrobending in an Optical Fiber. In Proceedings of the 7th SPVM Physics Conference, Iligan City, Philippines, 2005.
- Waluyo, T.; Bayuwati, D.; Mulyanto, I. The Effect of Macro-Bending on Power Confinement Factor in Single Mode Fibers. J. Phys. Conf. Ser. 2018, 985, 012001.
- Zarrin, P.S.; Escoto, A.; Xu, R.; Patel, R.V.; Naish, M.D.; Trejos, A.L. Development of a 2-DOF Sensorized Surgical Grasper for Grasping and Axial Force Measurements. IEEE Sens. J. 2018, 18, 2816–2826.
- Hooshiar, A.; Najarian, S.; Dargahi, J. Haptic Telerobotic Cardiovascular Intervention: A Review of Approaches, Methods, and Future Perspectives. IEEE Rev. Biomed. Eng. 2020, 13, 32–50.
- Ahmadi, R.; Arbatani, S.; Packirisamy, M.; Dargahi, J. Micro-Optical Force Distribution Sensing Suitable for Lump/Artery Detection. Biomed. Microdevices 2015, 17, 10.
- Etalons|LightMachinery. Available online: https://lightmachinery.com/optics/custom-optics/etalons/?gclid=CjwKCAiAl9efBhAkEiwA4TorivQ5hR3l0nhK7QTzIpbSkBXEJ6cBieX4tNCSpxTqG4QFQ7u2Zs8vhBoCFSUQAvD_BwE&gclid=CjwKCAiAl9efBhAkEiwA4TorivQ5hR3l0nhK7QTzIpbSkBXEJ6cBieX4tNCSpxTqG4QFQ7u2Zs8vhBoCFSUQAvD_BwE (accessed on 12 March 2023).
- Ascorbe, J.; Corres, J.M.; Arregui, F.J.; Matias, I.R. Recent Developments in Fiber Optics Humidity Sensors. Sensors 2017, 17, 893.
- Pendão, C.; Silva, I. Optical Fiber Sensors and Sensing Networks: Overview of the Main Principles and Applications. Sensors 2022, 22, 7554.
- Islam, M.R.; Ali, M.M.; Lai, M.-H.; Lim, K.-S.; Ahmad, H. Chronology of Fabry-Perot Interferometer Fiber-Optic Sensors and Their Applications: A Review. Sensors 2014, 14, 7451–7488.
- Wijesinghe, R.E.; Park, K.; Kim, D.-H.; Jeon, M.; Kim, J. In Vivo Imaging of Melanoma-Implanted Magnetic Nanoparticles Using Contrast-Enhanced Magneto-Motive Optical Doppler Tomography. J. Biomed. Opt. 2016, 21, 064001.
- Fercher, A.F.; Drexler, W.; Hitzenberger, C.K.; Lasser, T. Optical Coherence Tomography—Principles and Applications. Rep. Prog. Phys. 2003, 66, 239.
- Tomlins, P.H.; Wang, R.K. Theory, Developments and Applications of Optical Coherence Tomography. J. Phys. D Appl. Phys. 2005, 38, 2519.
- Jung, W.; Kim, J.; Jeon, M.; Chaney, E.J.; Stewart, C.N.; Boppart, S.A. Handheld Optical Coherence Tomography Scanner for Primary Care Diagnostics. IEEE Trans. Biomed. Eng. 2011, 58, 741–744.
- Jeon, M.; Kim, J.; Jung, U.; Lee, C.; Jung, W.; Boppart, S.A. Full-Range k-Domain Linearization in Spectral-Domain Optical Coherence Tomography. Appl. Opt. 2011, 50, 1158–1163.
- Wijesinghe, R.; Lee, S.-Y.; Ravichandran, N.K.; Shirazi, M.F.; Kim, P.; Jung, H.-Y.; Jeon, M.; Kim, A. Optical Screening of Venturianashicola Caused Pyruspyrifolia (Asian Pear) Scab Using Optical Coherence Tomography. Int. J. Appl. Eng. Res. 2016, 11, 7728–7731.
- Sensors | Free Full-Text | Overview of Fiber Optic Sensor Technologies for Strain/Temperature Sensing Applications in Composite Materials. Available online: https://www.mdpi.com/1424-8220/16/1/99 (accessed on 12 March 2023).
- Wijesinghe, R.E.; Lee, S.-Y.; Ravichandran, N.K.; Shirazi, M.F.; Kim, P.; Jung, H.-Y.; Jeon, M.; Kim, J. Biophotonic Approach for the Characterization of Initial Bitter-Rot Progression on Apple Specimens Using Optical Coherence Tomography Assessments. Sci. Rep. 2018, 8, 15816.
- Saleah, S.A.; Seong, D.; Han, S.; Wijesinghe, R.E.; Ravichandran, N.K.; Jeon, M.; Kim, J. Integrated Quad-Scanner Strategy-Based Optical Coherence Tomography for the Whole-Directional Volumetric Imaging of a Sample. Sensors 2021, 21, 1305.
- Wijesinghe, R.E.; Park, K.; Jung, Y.; Kim, P.; Jeon, M.; Kim, J. Industrial Resin Inspection for Display Production Using Automated Fluid-Inspection Based on Multimodal Optical Detection Techniques. Opt. Lasers Eng. 2017, 96, 75–82.
- Ravichandran, N.K.; Wijesinghe, R.E.; Lee, S.-Y.; Choi, K.S.; Jeon, M.; Jung, H.-Y.; Kim, J. Non-Destructive Analysis of the Internal Anatomical Structures of Mosquito Specimens Using Optical Coherence Tomography. Sensors 2017, 17, 1897.
- Seong, D.; Han, S.; Jeon, D.; Kim, Y.; Wijesinghe, R.E.; Ravichandran, N.K.; Lee, J.; Lee, J.; Kim, P.; Lee, D.-E.; et al. Dynamic Compensation of Path Length Difference in Optical Coherence Tomography by an Automatic Temperature Control System of Optical Fiber. IEEE Access 2020, 8, 77501–77510.
- Ravichandran, N.K.; Hur, H.; Kim, H.; Hyun, S.; Bae, J.Y.; Kim, D.U.; Kim, I.J.; Nam, K.-H.; Chang, K.S.; Lee, K.-S. Label-Free Photothermal Optical Coherence Microscopy to Locate Desired Regions of Interest in Multiphoton Imaging of Volumetric Specimens. Sci. Rep. 2023, 13, 3625.
- Ravichandran, N.K.; Lakshmikantha, H.T.; Park, H.-S.; Jeon, M.; Kim, J. Micron-Scale Human Enamel Layer Characterization after Orthodontic Bracket Debonding by Intensity-Based Layer Segmentation in Optical Coherence Tomography Images. Sci. Rep. 2021, 11, 10831.
- Lee, K.-S.; Ravichandran, N.K.; Yeo, W.-J.; Hur, H.; Hyun, S.; Bae, J.Y.; Kim, D.U.; Jong Kim, I.; Nam, K.-H.; Bog, M.G.; et al. Spectrally Encoded Dual-Mode Interferometry with Orthogonal Scanning. Opt. Express 2023, 31, 10500–10511.
- Ulgen, N.O.; Uzun, D.; Kocaturk, O. Phantom Study of a Fiber Optic Force Sensor Design for Biopsy Needles under MRI. Biomed. Opt. Express 2018, 10, 242–251.
- Huang, J.; Wang, T.; Hua, L.; Fan, J.; Xiao, H.; Luo, M. A Coaxial Cable Fabry-Perot Interferometer for Sensing Applications. Sensors 2013, 13, 15252–15260.
- Gomes, A.D.; Becker, M.; Dellith, J.; Zibaii, M.I.; Latifi, H.; Rothhardt, M.; Bartelt, H.; Frazão, O. Multimode Fabry–Perot Interferometer Probe Based on Vernier Effect for Enhanced Temperature Sensing. Sensors 2019, 19, 453.
- Force Sensor|Measuring Force | How It Works|FUTEK. Available online: https://www.futek.com/force-sensor (accessed on 22 February 2023).
- Lee, B.H.; Kim, Y.H.; Park, K.S.; Eom, J.B.; Kim, M.J.; Rho, B.S.; Choi, H.Y. Interferometric Fiber Optic Sensors. Sensors 2012, 12, 2467–2486.
- Arata, J.; Nitta, T.; Nakatsuka, T.; Kawabata, T.; Matsunaga, T.; Haga, Y.; Harada, K.; Mitsuishi, M. Modular Optic Force Sensor for a Surgical Device Using a Fabry–Perot Interferometer. Appl. Sci. 2019, 9, 3454.
- Gao, H.; Wang, J.; Shen, J.; Zhang, S.; Xu, D.; Zhang, Y.; Li, C. Study of the Vernier Effect Based on the Fabry–Perot Interferometer: Methodology and Application. Photonics 2021, 8, 304.
- Costa, G.; Gouvêa, P.; Soares, L.; Pereira, J.M.; Favero, F.; Braga, A.; Palffy-Muhoray, P.; Bruno, A.; Carvalho, I.C. In-Fiber Fabry-Perot Interferometer for Strain and Magnetic Field Sensing. Opt. Express 2016, 24, 14690.
- Guo, Y.; Kong, J.; Liu, H.; Xiong, H.; Li, G.; Qin, L. A Three-Axis Force Fingertip Sensor Based on Fiber Bragg Grating. Sens. Actuators A Phys. 2016, 249, 141–148.