Ground robots have been developed for a variety of agricultural applications, with autonomous and safe navigation being one of the most difficult hurdles in this development. When a mobile platform moves autonomously, it must perform a variety of tasks, including localization, route planning, motion control, and mapping, which is a critical stage in autonomous operations.
1. Introduction
Robotic platforms will increase farm efficiency, according to the strategic European research agenda for robotics [23]. Even though this field is becoming more popular in research [24], only a few commercial solutions are available [25]. Planting, harvesting, monitoring, spraying, and trimming are just a few of the agricultural chores that have been automated. Autonomous robot navigation is required for all of these procedures. This stage, which is a crucial aspect of autonomous robot navigation: localization, mapping, motion control, and path planning are the four prerequisites. Path planning for a robot requires a series of calculations for the translation and rotational motions of the robot to avoid obstacles from the initial point to the end point in the operating environment [26]. Agricultural areas provide a number of difficulties for robotic navigation. Agrarian fields, unlike interior surroundings, are complex, unstructured, and unpredictable. Path planning tactics that are well suited for indoor areas may not be suitable for agricultural needs, necessitating the development of sophisticated agricultural path planning strategies. Path planning for UGVs is drawing a lot of attention owing to the Industry 4.0 revolution and exponential growth in machine learning. There are various publications on this topic in the literature, with the first originating in 1989 when Palmer et al. [27] proposed a problem with efficient field paths around an obstruction prompted by agricultural sector concerns. Bochtis et al. [28] presented research on agricultural machinery improvements, with path planning algorithms for farm area coverage being one of the topics covered. A smart farm should rely on autonomous decision-making to ensure (i) system efficiency, (ii) better product quality, (iii) lower costs, (iv) improved product safety and environmental sustainability, (v) reduced consumer delivery time, and (vi) increased market share and profitability while stabilizing the labor force. When the robot detects an unexpected obstacle, it is forced to change course. To safely avoid the barrier, the robot must either design a short-term time-dependent trajectory and subsequently return to the original path or compute a new path and follow it autonomously.
3. Path Planning
Automatic ground vehicle guiding is now implemented using either local positioning systems (vision or laser-based sensors) or global positioning systems (GPSs) as shown in Figure 2.
Figure 2. Guiding system of automatic ground vehicle.
Since the 1970s, local positioning systems have been employed in autonomous applications [
35,
36]. Although they are inexpensive to adopt, their primary downside has been observed to be susceptibility to light conditions in outdoor locations [
37]. Recent advancements in satellite technology have resulted in a rise in the latter’s use, which has progressively displaced the former, which was dominant in the 1990s [
38,
39]. The use of real-time kinematic (RTK)-GPS with centimeter precision [
40] has allowed for extensive agricultural vehicle research. Agricultural vehicles with GPSs provide several advantages, including relieving the driver of the arduous duty of precisely directing the vehicle, improving trajectory tracking accuracy, and the ability to operate at night or in foggy conditions.
The configuration space (C-space) technique is an important method for articulating and finding a solution to the hindrance in path planning. It is a crucial notion to represent the robot as a single point. The complications are expanded in proportion to the robot’s size to compensate for the robot’s smaller size [
41]. Potential fields, sampling-based techniques, cell decomposition, and nature-inspired algorithms like the genetic algorithm (GA), particle swarm optimization (PSO), and ant colony optimization (ACO) are all examples of path planning approaches. It’s possible to divide path routing into two categories: path routing based on point-to-point and coverage path routing.
3. Application of Routing in Agriculture
Agricultural applications include navigation in vineyards, orchards, greenhouses, and wheat farms, among others. Monitoring, targeted spraying, and harvesting are only some of the uses for navigation. Some authors, on the other hand, propose a path planning algorithm that is tailored for agricultural areas and/or machinery but does not apply to a specific purpose. For agriculture applications, there is no widely used path planning algorithm, with different methods for each job, whether in 2D/3D surroundings.
The first paper listed in point-to-point route planning is from 1997 [
84], and it provides a GA for building a path for robots used in the agricultural field, while taking into account the limits of the location. Linker et al. [
85] released a paper in 2008 with a modified cell decomposition utilizing the A* method for orchard navigation. They took into account the limits that are unique to the vehicle and environment, such as a limited steering angle, a restricted range of pitch and roll degrees, a preference for forward motion, and reluctance for frequent turning. Although the claim by authors indicates that the path they have devised is the best, some of the limitations may lead to a less-than-ideal path. Santos et al. [
86] employed a similar technique considering the center of mass of the robot, for safe navigation in a steep slope vineyard, in which the algorithm limits roll, pitch, and yaw angles. They took into account the limits that are unique to the vehicle and environment in question, such as a limited steering angle, a restricted range of pitch and roll degrees, a preference for forward motion, and reluctance for frequent turning. Other characteristics, such as soil compaction and automated recharge systems, are taken into account in certain variants of this technique. Another work uses D* cell decomposition, that is built based on A* but incorporates robot dynamics. The goal of this work is to navigate around an unknown oil palm plantation [
87]. In an unstructured 3D terrain, an artificial potential field planner is used for energy optimization [
88], and Mai et al. [
89] employs multi-point measurement in potato cultivation using ACO.
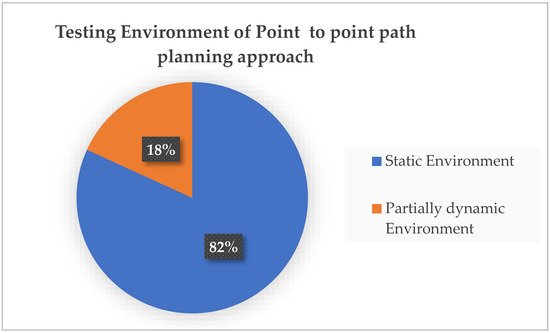
Point-to-point path routing approach is mainly tested in a static environment rather than the practical field condition of agricultural land as shown in Figure 3.
Figure 3. Testing environment of point-to-point path routing approach.
The methods used in coverage path planning issues differ throughout the literature. The total covering of irregularly shaped terrains is a typical objective in this field. In 2006, the earliest selected study presented a Hamiltonian Graph exploration to cover irregular-shaped areas with the least amount of overlaps and maneuvers [
95]. In 2009, Oksanen et al. [
67] presented a greedy technique for covering curve-shaped fields that included a heuristic algorithm. Hameed et al. [
96] presented a GA-based technique for predicting the best driving route for agricultural equipment to minimize fuel consumption five years later.
The authors say that their method is optimal or near-optimal or provides a sub-optimal alternative. Only two point-to-point [
86,
87] and two coverage path planning [
97,
98] studies offer an online solution in dynamic situations, showing that the majority of the approaches are static off-line path planners. Only a few point-to-point techniques are included in this category, hence fewer than half of the authors claim to have conducted experiments in a genuine setting. Furthermore, some works do not even identify the qualities of the robot.
The computational complexity was studied without any formal measurements because most authors are unable to provide appropriate facts on this topic, including computational requirements and temporal demands in some cases. Some articles characterize their coverage route planning approach as nondeterministic polynomial-time complexity, known as a level of complexity used to classify decision-making challenges [
105].
Coverage route planning is substantially more sophisticated in farming since it is a common problem. Point-to-point planners, on the other hand, are perfect for precision agricultural tasks requiring an autonomous job to be performed on a certain number of plants. When cutting plants, for example, the robot must just visit those that have been chosen, rather than the entire field. To summarize, agricultural path routing research is essential for implementing agricultural automation on the right “track”. Further research should focus on validating and optimizing the suggested methodologies through extensive testing in real-world agricultural settings.
This entry is adapted from the peer-reviewed paper 10.3390/su14159156