Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
Subjects:
Engineering, Ocean
Starting from the morphological function of fish, there are many swimming modes of fish in nature, the most authoritative classification of which, based on the organ of propulsion, was first proposed by Breder and Webb [38]. There are two main categories of propulsion methods, body caudal fin (BCF) propulsion and median paired fin (MPF) propulsion. In 1978, Lindsey classified the different families of fish species according to their mode of propulsion, which provided the essential foundation for the improvement of the overall performance of undulating propulsion biomimetic robots.
- underwater biomimetic robots
- undulating propulsion robots
- undulating propulsion mechanism
1. Introduction
Underwater robots have an important role to play in future marine development and underwater activities and have broad application prospects and great potential value [1,2,3,4,5]. Researchers have designed various underwater robots for underwater missions, such as remotely operated vehicles (ROVs) and autonomous underwater vehicles (AUVs) [6,7] (Figure 1). Traditional underwater robots are composed of rigid materials and most are propelled by propellers [8,9]. However, propeller propulsion is unsuitable for implementation in harsh marine environments as it can damage aquatic life or the seabed or even become trapped in weeds [10,11]. In addition, the low efficiency and stability of propeller-driven craft in low-speed attitude adjustment conditions greatly limit the applications of propeller propulsion. Therefore, novel underwater propulsion methods are desired and are currently being investigated [7].
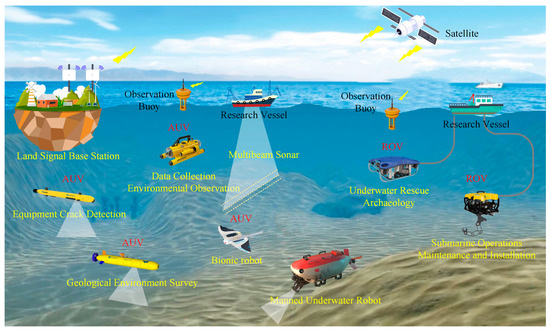
Figure 1. Overview of ROV and AUV application scenarios.
At present, increasing attention is being paid to bionics-based propulsion mechanisms. This propulsive method is validated in marine environments as its principle is inspired by various marine organisms. The soft bodies, good flexibility and strong environmental adaptability of marine organisms inspire new ideas for the development of underwater robots [12]. After a long period of evolution, fish have adapted to exploit the principle of hydrodynamics to move forward using tail fins or pectoral fins [13,14,15], which has become the best way to move in water [16,17]. The propulsion method employed by fish can maintain high maneuverability and change posture according to the changing environment. Inspired by the fish propulsion method, the first underwater bionic robot RoboTuna [18] was unveiled in 1994, and various types of underwater bionic robots continue to emerge. Equipped with various propulsion methods, underwater robots present positive development trends and broad application prospects [19,20,21,22,23] The term underwater biomimetic robot generally refers to robots that imitate the structure, function, or type of movement of fish species [24]. They have the basic movement characteristics of biomimetic fish and are continuously being optimized and improved on this basis. They have diverse functions, strong environmental adaptability and stability [25]. Undulating propulsion biomimetic robots are propelled by the undulating of pectoral fins, caudal fins and the body, an approach that has superior motion performance and can realize multiple motion modes [26]. In summary, undulating propulsion underwater biomimetic robots are increasingly favored by scholars due to their good maneuverability and stability.
2. The Swimming Mode of Fish
Starting from the morphological function of fish, there are many swimming modes of fish in nature, the most authoritative classification of which, based on the organ of propulsion, was first proposed by Breder and Webb [38]. There are two main categories of propulsion methods, body caudal fin (BCF) propulsion and median paired fin (MPF) propulsion. In 1978, Lindsey [39] classified the different families of fish species according to their mode of propulsion, which provided the essential foundation for the improvement of the overall performance of undulating propulsion biomimetic robots.
Figure 2 shows the fish species that employ BCF mode propulsion [32]. For this propulsion mode, the main body types are anguilliform, subcarangiform, carangiform, thunniform and ostraciiform, and the representative fish species for these body types are the eel, trout, herring, tuna and longhorn cowfish, respectively. Fish employing BCF mode propulsion gradually transition from undulating to oscillatory propulsion according to their different driving methods, as shown by the dashed line in Figure 2. In the figure, the first three propulsion modes are undulating and the last two are oscillatory. BCF propulsion modes are characterized by a high swimming speed—swordfish can reach a speed of 110 km/h—and good energy efficiency—tuna can maintain 90% energy efficiency while swimming for a long time [40]. Fish with the anguilliform body type employ fluctuations of the whole body and tail fin. This type of fish has a slender body and a faster swimming speed. Subcarangiform and carangiform fish species are relatively similar; the difference is that the former uses 1/2 of their body length for fluctuations, while the latter uses only about 1/3 of their body length for propulsion [41,42]. Compared with the anguilliform model, the fluctuation range is small, but the caudal fluctuation frequency is high. The propulsion of thunniform fish comes from the tail fin [43]. Based on hydrodynamic models, thunniform propulsion has been estimated to produce mechanical efficiencies in the range of 80–90% [18,44,45]. The fastest fish (tuna, dolphin) use this propulsion mode [46,47,48,49]. Fish species with the ostraciiform body type adopt an oscillatory propulsion mode. This type of fish simply oscillates the caudal fin, which induces only a small thrust; thus, the speed of travel is relatively slow [50].
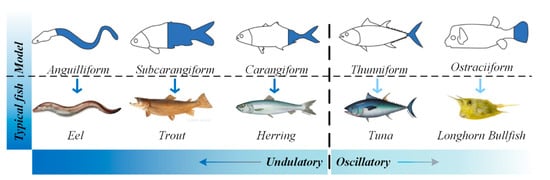
Figure 2. BCF propulsion mode [29].
Figure 3 shows the fish that employ MPF mode propulsion [32]. The main body types seen are rajiform, diofontiform, amiiform, gymnotiform, balistiform tetraodontidae and labriform, and the corresponding representative fish species are the stingray, puffer fish, bowfin fish triggerfish, yellowfin puffer and wrasse, respectively. The first five body types employ undulating propulsion, and the latter two employ oscillatory propulsion. As shown by the dotted line in Figure 3, most of the fish that employ MPF mode propulsion exhibit undulating propulsion. Rajiform fish species have soft and wide pectoral fins in a triangular shape and use the large fluctuations of the pectoral fins to generate driving power [51]. The most representative diodontiform fish species is the puffer fish. The puffer fish utilizes fluctuation of the pectoral fins on both sides of its body to propel [52]. Compared with rajiform fish species, the pectoral fins of diodontiform fish are smaller; thus, the traveling speed is slower. Amiiform fish generally have very long dorsal fins, which leads to larger amplitude waves during undulations, enabling larger movements [53]. Gymnotiform fish are similar to amiiform fish, except that their propelling fins are on the lower side of their bodies, and the power to move is generated through the oscillatory movement of the anal fin [54]. Balistiform fish generate the driving force using their dorsal and anal fins [55]. Balistiform-based locomotion has a very high propulsive efficiency compared to BCF propulsion modes. And compared to propulsion arising from the undulation of a slender fin, balistiform-based locomotion allows more maneuverability [56].
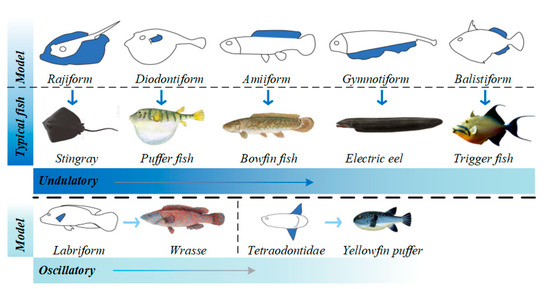
Figure 3. MPF propulsion mode [29].
Overall, it appears that BCF-based propulsion permits a higher travel speed than MPF-based propulsion, and uses the rapid oscillation of wings to obtain efficient propulsion [56]. For example, in terms of BCF mode, the average swimming speed of Chinook salmon is 0.6 m/s, and their maximum swimming speed can exceed 6 m/s [57]. The swordfish, with its carangiform body type, has a swimming speed close to 2 m/s, and its maximum speed can even reach 27 m/s [58]. Conversely, with MPF mode, the average swimming speed of the fish is relatively slow. For example, the average swimming speed of the common stingray is 0.81 m/s, and its maximum speed is only 13 m/s [59]. It can be seen that most of the fish employing BCF-based propulsion swim faster than fish employing MPF-based propulsion. Different fish species have different morphological functions, which guarantee their survival. Researchers should study the morphological functions of fish species for use as the inspiration for bionics-based propulsion systems.
This entry is adapted from the peer-reviewed paper 10.3390/biomimetics8030318
This entry is offline, you can click here to edit this entry!