Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
Swarm exploration by multi-agent systems relies on stable inter-agent communication. However, so far both exploration and communication have been mainly considered separately despite their strong inter-dependency in such systems. By a semantic communication design, communication efficiency in terms of latency, required data rate, energy, and complexity may be improved.
- distributed exploration
- probabilistic factor graphs
- machine learning
- semantic communication
- goal-oriented communication
1. Introduction
In hazardous or inhospitable environments, exploration, and monitoring tasks impose high risks on human operators. Typical examples include emergency scenarios caused by nuclear or toxic accidents, as well as exploration scenarios in extraterrestrial environments [1,2]. Here, the use of mobile robotic systems is required. Cooperation in a multi-agent system, such as a swarm, is able to accelerate such reconnaissance missions or mapping tasks significantly [3]. An example of swarm exploration on an extraterrestrial surface, e.g., on Mars, is shown in Figure 1: Agents distribute and process sensed data along the arrows with the aim to reconstruct an unknown physical or chemical process 𝑢(𝜹,𝑡) of interest at position 𝜹 and time t or relevant parameters of such processes in the domain ΩΩ. For instance, a process of interest can be the spatio-temporal distribution of gas concentration. There, a relevant process parameter is the location of gas sources.
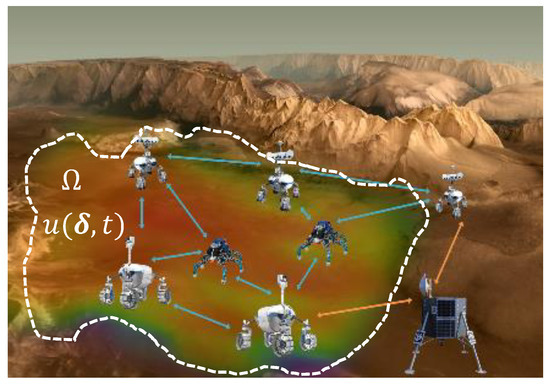
Figure 1. A swarm of autonomous agents explores an unknown physical process 𝑢(𝜹,𝑡) over spatial coordinate 𝜹 and time t in the spatial domain ΩΩ.
To achieve this goal, swarm exploration incorporates methods for distributed sensing, optimized (intelligent) information gathering [4], and agent movement/action coordination (exploitation). In particular, it requires the communication of locally and instantaneously available exploration measurements between agents. The underlying communication network acts as a data exchange backbone and is the tool that eventually enables the “diffusion” of local information to all agents and, hence, assists global decision-making. Communication is therefore always an integral part of a swarm exploration.
Swarm exploration often considers reliable and error-free communications, i.e., ideal links. However, communication systems do add uncertainty to the exchanged information. This means that studies so far paint an optimistic picture of the exploration performance metric. For instance, communication uncertainty needs to be considered when predicting new sampling positions for agents, since locations causing severe communication degradation will be useless for distributed information processing/exploration purposes.
2. Distributed Multi-Agent Exploration
Distributed exploration requires cooperative computational techniques, which are also referred to as “in-network processing” [12]. The estimation is done such that each node conducts “local” computations and shares intermediate results with its neighboring nodes. The key to these computations is a decomposition of a network-global objective function into a sum of “local” sub-objectives, typically with additional constraints that ensure a network-wide convergence to a specific solution. A special class of such algorithms is called consensus-based algorithms, see, e.g., [13,14,15,16,17,18]. This class of algorithms enforces consensus over the whole network, i.e., each node converges to the same solution. Here, the Alternating Directions Method of Multipliers (ADMM) [19] has gained popularity for in-network processing due to its ability to handle different types of constraints on model parameters.
As an alternative, diffusion-based approaches (see e.g., [20,21,22] and references therein) have been proposed that estimate a quantity in a distributed fashion within a network without enforcing consensus. Such approaches are also based on solving an optimization problem that permits a decomposability of the network objective function. One of the applications of interest for swarm exploration is seismic imaging of subsurface structures. In particular, distributed subsurface imaging techniques based on the full waveform inversion and the traveltime tomography have been proposed recently that can be directly applied to decentralized multi-agent networks, s. [22,23]. Full waveform inversion is a high-resolution geophysical imaging method based on the wave equation [24]. For a distributed implementation of this method, a global cost function is decomposed over the receivers and local gradients and subsurface images are computed. Following the diffusion-based information exchange, these gradients, and images are exchanged among the receivers in order to obtain a global estimate of the subsurface image.
For the exploration of complex physical processes that are described in terms of Partial Differential Equations (PDEs), classical approaches typically do not provide a direct assessment of statistical information about the quality of estimated parameters. In contrast, Bayesian inference methods postulate randomness of the parameters of interest and are from the domain of machine learning [25]. As such, instead of a point estimate, parameter distributions are computed. FGs can be used to describe probabilistic relationships between all model parameters [26] and parameter estimation is then realized using message passing schemes [27]. Bayesian tools have been used in the past for inverse PDE problems (see, e.g., [3,28]). In [3], the authors use FGs for inverse PDE modeling in a distributed setting and to localize gas sources based on concentration measurement samples. In essence, random variables are used to represent the gas concentration distribution in each mesh cell of the discretized PDE. An FG is then applied to capture temporal and spatial dependencies between concentration variables.
Having inferred the model parameters, one can then design a movement planning strategy that exploits the statistics of the estimated model parameters to optimally guide agents to new, more informative sampling locations to accelerate the exploration process. The work of [31] proposes information-driven approaches that guide agents based on mutual information or entropy. Furthermore, some swarm exploration approaches make use of (deep) Reinforcement Learning (RL) for the movement strategy of the agents [32,33,34]. However, the success of these methods relies heavily on the availability of suitable training data to learn an adequate movement strategy. Especially in applications with scarce training data, such approaches are likely to fail or perform unreliably in real environments: The use of synthetic training data introduces a model mismatch that is learned by the system. Furthermore, the learned behavior cannot be easily corrected a-posteriori due to the structure of the Deep Neural Network (DNN) that cannot be interpreted.
All aforementioned methods for distributed exploration and path planning heavily rely on agent-to-agent communication of the exchanged data or messages. Hence, the quality of the inter-agent communication links has a direct impact on the exploration result. However, the majority of state-of-the-art methods for distributed exploration do not sufficiently take into account the erroneous nature of the communication links. Most studies consider erroneous inter-agent links by integrating noise and link failures into the link model, see, e.g., [35,36]. The algorithmic solutions are then adapted to these erroneous communication links.
3. Machine Learning for Communications
The probabilistic view often used in exploration is vital for the field of communications. Since Claude Elwood Shannon laid the theoretical foundation of communications and information theory [37], probabilistic models have found their way not only into exploration but also into one prominent example of recent research interest: Artificial Intelligence (AI), in particular its subdomain Machine Learning (ML).
In the last decade, ML saw the emergence of powerful (probabilistic) models known as Deep Neural Networks (DNNs). Thanks to its ability to approximate arbitrarily well and to learn abstract features, it has led to several breakthroughs in research areas where there is no explicit domain knowledge but data to be collected, e.g., pattern recognition, generative modeling, and RL [38]. Previously considered intractable to optimize, automatic differentiation on dedicated Graphics Processing Units (GPUs) and innovative architectures now enable data-driven training of DNNs.
The impressive results showing equal or superhuman performance have not gone unnoticed by the communications community. Thus, much of the recent literature focuses on the data-driven design of the physical layer with DNNs, e.g., for wireless, molecular, and fiber-optical channels [38]. One prominent early example of such an approach is the Auto Encoder (AE) where a complete communication system is interpreted as one DNN and trained end-to-end [39].
In wireless communications, a number of channel models have been proposed and are widely used, so that key gains from using ML are expected in approximating optimal algorithmic structures that are otherwise numerically too complex (algorithm deficit) to be realized. For example, the computational complexity of Maximum A-Posteriori (MAP) decoding of large block-length codes or MAP detection, e.g., in massive Multiple Input Multiple Output (MIMO) systems, grows exponentially with code/system dimensions. In fact, e.g., using plain DNNs for decoding enables lowering of decoding complexity while approximately maintaining MAP error rate [40]. To improve generalization and reduce training complexity, more recent works focus on the idea of deep unfolding [41,42,43]. In deep unfolding, the parameters of a model-based iterative algorithm with a fixed number of iterations are untied and enriched with additional weights as well as non-linearities. The resulting DNN can be optimized for performance improvements in MIMO detection [42,44] and belief propagation decoding [42]. An example of an algorithm deficit on a higher level beyond the physical layer is resource allocation, where it is difficult to analytically express the true objective function or to find the global optimum. Thus, Deep RL has proven to be a proper means [45].
Semantic Communication
In contrast to wireless channels, a model deficit holds for molecular and fiber-optical channels. Note that it applies in particular to the example of this article: integration of semantic context, here exploration, into communication system design. The idea of semantic communication emerged in the early 1950s [46,47,48] but has seen a lot of research interest only recently with the rise of ML application to the physical layer [5,6,7,8,9].
Its notion traces back to Weaver [46] who reviewed Shannon’s information theory [37] in 1949 and amended considerations w.r.t. semantic content of messages. Oftentimes quoted is his statement that “there seem to be [communication] problems at three levels” [46]:
-
How accurately can the symbols of communication be transmitted? (The technical problem).
-
How precisely do the transmitted symbols convey the desired meaning? (The semantic problem).
-
How effectively does the received meaning affect conduct in the desired way? (The effectiveness problem).
Weaver saw the broad applicability of Shannon’s theory back in 1949 and argued for the generality of the theory at Level A for all levels [49].
The generic model of Weaver was revisited by Bao, Basu et al. in [48,50] where the authors define semantic information sources and semantic channels. In [48], the authors consider joint semantic compression and channel coding at Level B with the classic transmission system, i.e., Level A, as the (semantic) channel. By this means, the authors can derive semantic counterparts of the source and channel coding theorems.
Recently, drawing inspiration from Weaver, Bao, Basu et al. [46,48,50] and enabled by the rise of ML in communications research, DNN-based natural language processing techniques, i.e., transformer networks, were introduced in AEs for the task of text and speech transmission [11,51,52,53]. The aim of these techniques is to learn compressed hidden representations of the semantic content of sentences to improve communication efficiency, but exact recovery of the source (text) is the main objective. This leads to performance improvements in semantic metrics, especially at low Signal-to-Noise Ratio (SNR) compared to classical digital transmissions.
This entry is adapted from the peer-reviewed paper 10.3390/electronics12081908
This entry is offline, you can click here to edit this entry!