There has been a growing interest in the use of innovative technology in Speech and Language Therapy (SLT). Socially Assistive Robots (SARs) have drawn significant attention in the field of speech and language therapy. While initial results have been promising, further exploration is needed to fully understand the potential and usefulness of SARs in the SLT. It has been observed that the robots provide effective and engaging therapy experiences for children and adolescents with different communication disorders.
- SLT
- SARs
- AI
- speech disorders
1. Social Robots as ATs in the Rehabilitation of Communication Disorders
2. Technical, Methodological, and Ethical Limitations and Challenges of Using SARs in Speech and Language Therapy
-
Limited adaptability and personalization: Most SARs are pre-programmed with a fixed set of responses and behaviors, which may not be tailored to the individual needs and preferences of each patient.
-
Limited physical capabilities: SARs may have limited physical capabilities, such as the ability to manipulate objects or to move around in the environment, which may limit their effectiveness in certain therapy contexts.
-
Limited speech recognition and natural language processing capabilities: SARs may have difficulty accurately recognizing and understanding speech, especially in noisy environments or when dealing with non-standard dialects or accents, or in cases of speech and/or language disorders.
-
Limited emotional and social intelligence: Although SARs are designed to interact with humans, they may lack the emotional and social intelligence needed to provide appropriate responses to patients who are experiencing strong emotions or who have complex social communication needs.
-
Technical failures and maintenance issues: Like any technology, SARs may experience technical failures or require maintenance and updates, which can disrupt therapy sessions and create additional stress for patients and therapists.
-
Cost: The cost of SAR technology and maintenance may be prohibitively high for some healthcare organizations, limiting their opportunity to provide this type of therapy to patients who could benefit from it.
-
Reliability and Validity: One of the main challenges is ensuring the reliability and validity of the results when using SARs in speech and language therapy. This requires careful control of the methods of study design and data collection methods to minimize sources of bias and error.
-
Usability and User Acceptance: SARs must be usable and acceptable to the target population, including children with communication disorders, to be effective. This may require significant efforts to design and refine the user interface and user experience of the robot.
-
Standardization: There is a lack of standardized protocols and assessment methods for using SARs in speech and language therapy, which can make it difficult to compare results across studies and determine the effectiveness of different approaches.
-
Evaluation: Assessing the effectiveness of SARs in speech and language therapy often requires multiple raters to evaluate the therapy sessions. Ensuring inter-rater reliability, or consistent long-term effectiveness: Another challenge is demonstrating the long-term effectiveness of SARs in speech and language therapy. Many studies have only measured short-term outcomes, so there is a need for longer-term studies to determine the sustainability of the benefits of using SARs in therapy.
-
A number of participants: Usually, the sample is small in most published research about children/adolescents with communication disorders who interact with the SARs. The study groups consist of heterogenous types of neurodevelopmental disorders and lack control groups; therefore, it is difficult to apply statistical analysis.
-
Privacy and Confidentiality: SARs collect and store sensitive information about the users, such as their speech and language patterns, which can raise concerns about privacy and confidentiality. This requires appropriate data protection measures, such as encryption and secure storage, to prevent unauthorized access to the data.
-
Bias and Discrimination: SARs are designed and programmed by humans, which raises the possibility of unintended bias and discrimination in their behavior and interactions with users. This requires careful consideration of the design and programming of SARs to ensure that they do not perpetuate or amplify existing biases and discrimination.
-
Responsibility and Liability: SARs are increasingly being used in healthcare settings, which raises questions about who is responsible and liable for any harm caused by their use. This requires clear and well-defined policies and procedures for the use of SARs in healthcare and speech and language therapy, as well as appropriate insurance coverage and risk management strategies.
-
Interpersonal Relationships: SARs may have the potential to affect interpersonal relationships and human interactions, including the relationships between patients, therapists, and caregivers. This requires careful consideration of the design and use of SARs to ensure that they enhance, rather than undermine, existing relationships and interactions.
-
Dependence and Over-Reliance: There is a risk that users may become overly dependent on SARs and cease to engage in important interpersonal relationships and activities, which can have negative impacts on their health and well-being. This requires careful monitoring and evaluation of the use of SARs in speech and language therapy to ensure that they are not creating negative consequences for users.[30][30]
The researchers also reviewed articles which serve as models for future implications of different frameworks [31][32]. In the article [32], the authors offer possible employment of social robots as additional tools in stuttering intervention. The scientists describe eight scenarios with social robots which can be adjusted in therapies with children and adults. The authors emphasize that HRI (Human–Robot Interaction) can significantly aid people who stutter and argue that there is a need to explore the prospects of robotics via experiments and studies with relevant participants.
The paper [33] reports an application which provides an opportunity to use a humanoid robot as a stutterer’s aide and therapist. Visual and auditory feedback was applied during the
therapy with the robot. The major advantage of the suggested application is the possibility of using a humanoid robot in therapy sessions accompanied by the “echo” method and expanded by the visual feedback. The robot can substitute the therapist and can lead the treatment of the patient who performs different activities, such as conversing, reading, or running a monologue. Another advantage is the potential to remotely connect to the robot which removes external noise. The proposed scenario will be tested on a group of people
and more experiments are necessary to prove the successful relevance of this application.
The article [34] offers a systematic review of research on therapies assisted by robots for children with autism. The authors try to understand the tendencies in studies on this type of therapy so that they can propose probable prospects in the field. Thirty-eight articles were analyzed and it was concluded that there is a substantial number of publications on robot-assisted autism therapy (RAAT). This points to growing interest in the use of robots in logopedic sessions. The advances of artificial intelligence and machine learning have impacted that interest greatly. The above-mentioned data postulate that robot-assisted therapies are promising tools which can support and help cognitive, social, and emotional development of children with ASD. The authors hope that the challenges which people face at present will be addressed successfully via skilled interdisciplinary cooperation.
The scientific team in [35] compared two situations of storytelling to a diseased person with neurodevelopmental disorder: 1. human–human interaction and 2. robot–human interaction. Their results showed that the story told by the plush robot ELE is more engaging. The potential advantages of the presented social robot are: enhancing and encouraging
verbal communication in person with neurodevelopmental disorders; limited non-verbal characteristics of communication of the robot that make the playful situation predictable; monitoring, gathering, and analyzing the data of the client’s behavior from a distance; saving time and money, as it enables remote therapy. The future work is directed to the application of the social robot for a larger number of people with neurodevelopmental disorders. This study can be taken as a model for working with children with neurological disorders.
To summarize, the potential scenarios for using SARs in the rehabilitation of communication disorders in children and adolescents is huge. Social robots can assist in vocabulary and language development, articulation therapy, speech rate control, storytelling, and improvement in social skills. Through engaging and playful activities, social robots can offer real-time feedback and guidance to help individuals practice and enhance their communication skills.
The types of communication disorders indicated in the studies mentioned are few, such as dyslexia, dysgraphia, specific language impairment, and dyslalia. The number of articles where the participation of team speech therapists is included is small and for this reason, the authors have preferred to describe the primary disorder, for example, ASD, cerebral palsy, or hearing impairment. All these conditions have different kinds of communication disorders. They belong to the category of neurodevelopmental disorders; in most of them, the language acquisition is affected at different levels and it varies in severity.
Possible applications of SARs in the intervention of communication disorders in children and adolescents based on the reviewed papers are:
- Vocabulary and language development (verbal and sign language): Social robots can assist children in practicing and improving their language skills through playful and engaging activities, offering real-time feedback and encouragement. SARs are able to initiate and support communication and enrich child’s vocabulary. They also help therapists train and assess linguistic capabilities of children and adolescents with language impairments [6][22][31][32][33][36][37][38][39][40][41][42][43][44][45][46][47][48][49][50][51][52][53][54][55][56][57][58].
- Articulation therapy: Social robots can help children with speech disorders practice pronunciation and articulation exercises. The youngsters are observed to show increased verbal production and participation via SARs. The latter contribute to improvements in articulation, and phonological, morphosyntactical, and semantic communication [31][41][45][46][49][50][55][59][60][61]. Auditory skills: Children learn and develop language through listening. Some SARs are used to develop auditory skills as well as verbal speech. Robots are able to offer sounds with different frequency. SARs can also repeat words and provide support when necessary. In addition, robots can give visual and auditory feedback which is essential for therapists [39][49][62].
- Speech rate control: Social robots can aid children in practicing speaking at a slower rate, offering real-time feedback to improve fluency gradually [32][33][63].
- Storytelling: Social robots can assist children in practicing storytelling and engaging in conversation. Stories told by robots are found to be more engaging and funnier forchildren. SARs encourage verbal communication and enhance cognitive abilities in youngsters. Robots can also monitor, gather, and analyze data from the child’s behavior [6][35][41][59].
- Social skills: Social robots can help children improve social skills, such as turn-taking, joint attention, emotion regulation, and eye contact through playful and engaging activities. During these activities, different participants, together with the robots, can take part—peers, therapists, or parents. Children are provided support and guidanceduring play. Youngsters learn to interact and cooperate with the others and robotbased therapies enhance their cognitive and emotional abilities [33][36][38][39][40][44][45][53][54][58][64].
- Transfer the skills in life: Some of the studies indicate that the skills acquired in playbased interaction between a child and the SAR are transferred to real life and applied in everyday situations [53][54][55][62].
- Personalization and adaptation: SARs have the ability to personalize the interactive scenarios by utilizing individual data, performance metrics, and individual progress to adapt therapy exercises, content, and level of difficulty to the specific CD [39][43][46][48][50][55][59][60][64].
Possible applications of SARs in the intervention of communication disorders in children and adolescents based on the reviewed papers are:
• Vocabulary and language development (verbal and sign language): Social robots can assist children in practicing and improving their language skills through playful and engaging activities, offering real-time feedback and encouragement. SARs are able to initiate and support communication and enrich child’s vocabulary. They also help therapists train and assess linguistic capabilities of children and adolescents with language impairments [6][22][31][32][33][36][37][38][39][40][41][42][43][44][45][46][47][48][49][50][51][52][53][54][55][56][57][58].
• Articulation therapy: Social robots can help children with speech disorders practice pronunciation and articulation exercises. The youngsters are observed to show increased verbal production and participation via SARs. The latter contribute to improvements in articulation, and phonological, morphosyntactical, and semantic communication [31][41][45][46][49][50][55][59][60][61]. Auditory skills: Children learn and develop language through listening. Some SARs are used to develop auditory skills as well as verbal speech. Robots are able to offer sounds with different frequency. SARs can also repeat words and provide support when necessary. In addition, robots can give visual and auditory feedback which is essential for therapists [39][49][62].
• Speech rate control: Social robots can aid children in practicing speaking at a slower rate, offering real-time feedback to improve fluency gradually [32][33][63].
• Storytelling: Social robots can assist children in practicing storytelling and engaging in conversation. Stories told by robots are found to be more engaging and funnier for children. SARs encourage verbal communication and enhance cognitive abilities in youngsters. Robots can also monitor, gather, and analyze data from the child’s behavior [6][35][41][59].
• Social skills: Social robots can help children improve social skills, such as turn-taking, joint attention, emotion regulation, and eye contact through playful and engaging activities. During these activities, different participants, together with the robots, can take part—peers, therapists, or parents. Children are provided support and guidance during play. Youngsters learn to interact and cooperate with the others and robot-based therapies enhance their cognitive and emotional abilities [33][36][38][39][40][44][45][53][54][58][64].
• Transfer the skills in life: Some of the studies indicate that the skills acquired in playbased interaction between a child and the SAR are transferred to real life and applied in everyday situations [53][54][55][62].
• Personalization and adaptation: SARs have the ability to personalize the interactive scenarios by utilizing individual data, performance metrics, and individual progress to adapt therapy exercises, content, and level of difficulty to the specific CD [39][43][46][48][50][55][59][60][64]. Table 1 presents interactive scenarios with SARs described in pilot studies. They are ordered chronologically, with the most recent publications appearing first.
Table 1. Description of interactive scenarios with SARs (pilot studies).
|
Reference: [40], 2022 |
Name of Scenario: Farm Animals—Voices and Names |
|
Objectives |
Remote speech and language therapy; Enrich the child’s vocabulary. |
|
Treatment domain, Type of CD |
Language domain, Farm animals’ voices and names; children with neurodevelopmental disorders. |
|
Treatment technique |
Identification of farm animal voice. Identification and pronunciation of words for farm. |
|
Play type (social ∣ cognitive) |
Cognitive play. |
|
Interaction technique |
Child–robot interaction. |
|
Age |
Four years old. |
|
Participants’ role and behavior |
There are five participants in this scenario, a speech and language therapist (control the game) a social robot (instructor–Nao), a social robot EmoSan (playmate), parent (co-therapist), and a child with neurodevelopmental disorders (playmate). |
|
Activity description |
[40], page 123 (https://youtu.be/KpeQcIXG6cA, accessed on 16 April 2023). |
|
Robot configuration and mission |
A social robot NAO, a social robot EmoSan, pictures of farm animals, a tablet and a laptop, BigBlueButton platform for telepresence. |
|
Used software |
NAOqi software v.2.8.6.23, Python v.2.7, Node-RED v.2.1.3. |
|
Setting and time |
This scenario was carried out in a clinical setting over multiple sessions. |
|
Variation |
The activity can also include more participants. |
|
Reference: [40], 2022 |
Name of Scenario: Storytime |
|
Objectives |
Follow a story and representation of a story as a sequence of scenes in time. |
|
Treatment domain, Type of CD |
Language domain, children with neurodevelopmental disorders. |
|
Treatment technique |
Story as a sequence of scenes in time. |
|
Play type (social ∣ cognitive) |
Cognitive play. |
|
Interaction technique |
Child–robot interaction. |
|
Participants’ role and behavior |
There are four participants in this scenario, a speech and language therapist (control the game), a social robot (instructor-Nao), a social robot EmoSan (playmate), and a child with neurodevelopmental disorders (playmate). |
|
Age |
3–10 years old (15 children) |
|
Activity description |
[40], page 123 (https://youtu.be/AZhih7KlaPc, accessed on 16 April 2023) |
|
Robot configuration and mode of operation |
A social robot NAO, a social robot EmoSan was used with 3 pictures of story scenes and a whisk. |
|
Used software |
NAOqi software , v.2.8.6.23 Python 2.7, Node-RED v.2.1.3. |
|
Setting and time |
This scenario was carried out in a clinical setting over multiple sessions. |
|
Variation |
The activity can also include more participants to promote cooperative play. |
|
Variation |
- |
|
Reference: [64], 2021 |
Name of Scenario: Different interactive activities with a tablet; robots are expected to be used. |
|
Objectives |
To propose a conceptual framework for designing linguistic activities (for assessment and training), based on advances in psycholinguistics. |
|
Treatment domain, Type of CD |
Speech and language impairments—developmental language disorder, autism spectrum disorder. |
|
Treatment technique |
Interactive therapeutic activities. |
|
Play type (social ∣ cognitive) |
Social and cognitive. |
|
Interaction technique |
The child performs activities on a tablet. |
|
Age |
4–12 years old. |
|
Participants’ role and behavior |
The participants in this scenario are the children (30), performing activities via a tablet. |
|
Activity description |
[64], page 2–6. |
|
Robot configuration and mission |
Socially assistive robots/tablets with different modules for training and assessing linguistic capabilities of children with structural language impairments. |
|
Used software |
Socially assistive robot and/or mobile device. |
|
Setting and time |
This scenario has been carried out in clinical settings over multiple sessions, two groups have been included—a target and a control group. |
|
Variation |
There are different linguistic tasks which evaluate different linguistic skills. Activities can include more than one participant. |
|
Reference: [48], 2021 |
Name of Scenario: Serious games conducted by a social robot via embedded mini-video projector |
|
Objectives |
To show the application of a robot, called MARIA T21 as a therapeutic tool. |
|
Treatment domain, Type of CD |
Autism spectrum disorder, Down syndrome. |
|
Treatment technique |
Interactive serious games. |
|
Play type (social ∣ cognitive) |
Social and cognitive. |
|
Interaction technique |
Robot–child interaction. |
|
Age |
4–9 years old. |
|
Participants’ role and behavior |
The participants in this scenario are the social robot and eight children, supervised by the therapist and a group of researchers. |
|
Activity description |
[48], page 6–14 (see in Section 5 Methodology) |
|
Robot configuration and mission
|
A new socially assistive robot termed MARIA T21 which uses an innovative embedded mini-video projector able to project Serious Games on the floor or tables. |
|
Used software |
A set of libraries-PyGame, written in Python 2.7; an open-source robot operating system. |
|
Setting and time |
The tests were carried out partly in a countryside region and partly in a metropolitan area, in order to expand socioeconomic diversity. |
|
Variation |
The games were created with all their possible events, characters, awards, and stories and have included different types of serious games. |
|
Reference: [65], 2021 |
Name of Scenario: Questions and Answering with NAO Robot |
|
Objectives |
Initiation of conversation. |
|
Treatment domain, Type of CD |
Language domain, Language disorder due to ASD. |
|
Treatment technique |
Asking and answering simple questions. |
|
Play type (social ∣ cognitive) |
Social play. |
|
Interaction technique |
Child–robot interaction. |
|
Age |
5–24 years old (4 children). |
|
Participants’ role and behavior |
There are five participants in this scenario, two teachers, two researchers, social robot, and the child. |
|
Activity description |
[65], page 0357 |
|
Robot configuration and mission |
A social robot NAO is talking with a child. |
|
Used software |
NAOqi software v.2.8.6.23 |
|
Setting and time |
This scenario was carried out in a classroom of special school, in 4 sessions. |
|
Variation |
- |
|
Reference: [65], 2021 |
Name of Scenario: Physical Activities with NAO Robot. |
|
Objectives |
Initiation of physical movements. |
|
Treatment domain, Type of CD |
Basic communication domain, Social and communication interaction due to ASD. |
|
Treatment technique |
Provocation of imitation of physical movements. |
|
Play type (social ∣ cognitive) |
Social play. |
|
Interaction technique |
Child–robot interaction. |
|
Age |
5–24 years old (4 children) |
|
Participants’ role and behavior |
There are five participants in this scenario, two teachers, two researchers, social robot, and the child. |
|
Activity description |
[65], page 0357 |
|
Robot configuration and mission |
A social robot NAO is talking with a child. |
|
Used software |
NAOqi software v.2.8.6.23 |
|
Setting and time |
This scenario was carried out in a classroom of special school, in 4 sessions. |
|
Variation |
- |
|
Reference: [52], 2021 |
Name of Scenario: I like to eat popcorn |
|
Objectives |
Learning Bulgarian Sign Language. |
|
Treatment domain, Type of CD |
Language domain, Language disorder due to hearing impairment. |
|
Treatment technique |
Demonstration of signs, video and pronunciation of words from Sign Language. |
|
Play type (social ∣ cognitive) |
Social play. |
|
Interaction technique |
Child–robot interaction. |
|
Participants’ role and behavior |
There are two participants in this scenario social robot (instructor) and the typically developed toddler. |
|
Age |
5 years |
|
Activity description |
[52] page 72–73 |
|
Robot configuration and mode of operation |
A social robot Pepper. |
|
Used software |
NAOqi v.2.8.6.23 |
|
Setting and time |
This scenario has been carried out in a lab setting, in one session. |
|
Variation |
The activity can also include more participants to promote cooperative play. |
|
Reference: [50], 2016 |
Name of Scenario: Different activities between a robot and children |
|
Objectives |
To present a robotic assistant which can provide support during therapy and can manage the information. |
|
Treatment domain, Type of CD |
Communication disorders. |
|
Treatment technique |
Tasks and exercises for language, pragmatics, phonetics, oral-motor, phonological, morphosyntactic, and semantic interventions. |
|
Play type (social ∣ cognitive) |
Social and cognitive. |
|
Interaction technique |
Robot–child interaction. |
|
Age |
- |
|
Participants’ role and behavior |
The participants in this scenario are the robot and 32 children of regular schools. |
|
Activity description |
[50], see pages 4–6 |
|
Robot configuration and mission |
The robot was designed via 3D technology, and has a humanoid form with possibility to wear any costume representing animals (dogs, cats, etc.), children (boys or girls), or any other characters. The main controller of the robot (brain). |
|
Used software |
A Raspberry PI 2 plate that contains the operative system (Raspbian-Raspberry Pi Model 2 B+). |
|
Setting and time |
The pilot experiment consists of two stages—lab tests to determine robot’s performance (over multiple activities) and analyses of patients’ responses to the robot’s appearance. |
|
Variation |
The robot offers different activities (playing, dancing, talking, walking, acting, singing, jumping, moving, and receiving voice commands. The system automates reports generation, monitoring of activities, patient’ data management, and others. The robot’s appearance can be customized according to the preferences of the patients. |
|
Reference: [60], 2016 |
Name of Scenario: Therapy mode |
|
Objectives |
Development of phonological, morphological, and semantic areas. |
|
Treatment domain, Type of CD |
Language and speech domain; Children with Cerebral Palsy. |
|
Treatment technique |
The robot displays on its screen some activities related to speech therapy such as phonological, semantic, and morphosyntactic exercises. |
|
Play type (social ∣ cognitive) |
Cognitive play. |
|
Interaction technique |
Child–robot interaction. |
|
Age |
7 years |
|
Participants’ role and behavior |
There are three participants in this scenario, a speech and language therapist, social robot, and the child. |
|
Activity description |
[60], page 4 |
|
Robot configuration and mission |
SPELTRA (Speech and Language Therapy Robotic Assistant) with a display, |
|
Used software |
a Raspberry Pi Model 2 B+ (2015); mobile application (Android-Raspberry Pi Model 2 B+,2015). |
|
Setting and time |
This scenario was carried out in a school setting, in three sessions |
|
Variation |
Generates a complete report of activities and areas of language which the child has worked; it could be used by parents and their children at home. |
|
Reference: [53], 2016 |
Name of Scenario: Fruit Salad |
|
Objectives |
Assessment of nonverbal communication behavior and verbal utterances, transferring skills in life. |
|
Treatment domain, Type of CD |
Nonverbal behavior and Language domain, Children with ASD. |
|
Treatment technique |
The robot had the role of presenting each trial by following the same repetitive pattern of behaviors: calling the child’s name, looking at each fruit, expressing the pre-established facial expression, and providing an answer at the end after the child placed a fruit in the salad bowl. |
|
Play type (social ∣ cognitive) |
Social play. |
|
Interaction technique |
Child–robot interaction. |
|
Age |
5–7 years |
|
Participants’ role and behavior |
There are three participants in this scenario, an adult, social robot, and the child. |
|
Activity description |
[53], page 118 |
|
Robot configuration and mission |
Social robot Probo and plastic fruit toys. |
|
Used software |
Elan—Linguistic Annotator, version 4.5 |
|
Setting and time |
This scenario has been carried out in the therapy rooms in three schools, in two sessions. |
|
Variation |
The game is played in child–adult condition or in child–robot condition. |
|
Reference: [54], 2016 |
Name of Scenario: Shapes |
|
Objectives |
Assessment of decoding/understanding words. |
|
Treatment domain, Type of CD |
Language domain, Language disorder due to hearing impairment. |
|
Treatment technique |
Identification; listening and following spoken instructions; Sign Language interpreter helps with the instructions if the child needs it. |
|
Play type (social ∣ cognitive) |
Cooperative and practice play. |
|
Interaction technique |
Child–robot interaction. |
|
Participants’ role and behavior |
There are three participants in this scenario, a speech and language therapist (mediator), social robot (instructor), and the child with hearing impairment. |
|
Age |
5–15 years old |
|
Activity description |
[54], page 257 |
|
Robot configuration and mode of operation |
A social robot NAO was used with pictures of different shapes and colors. |
|
Used software |
NAOqi software v.2.8.6.23 |
|
Setting and time |
This scenario was carried out in a school setting, in one session. |
|
Variation |
The activity can also include more participants to promote cooperative play. |
|
Reference: [54], 2016 |
Name of Scenario: Emotions |
|
Objectives |
Understanding emotion sounds and naming the emotion, transferring skills in life. |
|
Treatment domain, Type of CD |
Language domain, Language disorder due to hearing impairment. |
|
Treatment technique |
Identification of emotion sounds; Sign Language interpreter helps with the instructions if the child needs it. |
|
Play type (social ∣ cognitive) |
Cognitive play. |
|
Interaction technique |
Peer interaction. |
|
Participants’ role and behavior |
There are three participants in this scenario, a speech and language therapist (mediator), social robot (instructor), and the child with hearing impairment. |
|
Age |
5–15 years |
|
Activity description |
[54], page 257 |
|
Robot configuration and mode of operation |
A social robot NAO was used with pictures of emotions. |
|
Used software |
NAOqi software v.2.8.6.23 |
|
Setting and time |
This scenario was carried out in a school setting, in one session. |
|
Variation |
The activity can also include more participants to promote cooperative play. |
|
Reference: [54], 2016 |
Name of Scenario: Shopping_1 |
|
Objectives |
Identification of environment sounds and words pronunciation, transferring skills in life. |
|
Treatment domain, Type of CD |
Language domain, Language disorder due to hearing impairment. |
|
Treatment technique |
Identification of environmental sounds; Demonstration of body movements; Sign Language interpreter helps with the instructions if the child needs it. |
|
Play type (social ∣ cognitive) |
Cognitive play. |
|
Interaction technique |
Peer interaction. |
|
Participants’ role and behavior |
There are three participants in this scenario, a speech and language therapist (mediator), social robot (instructor), and the child with hearing impairment. |
|
Age |
5–15 years |
|
Activity description |
[54], page 257 |
|
Robot configuration and mode of operation |
A social robot NAO and hygienic products (soap, shampoo, sponge, toothpaste and etc.). |
|
Used software |
NAOqi software v.2.8.6.23 |
|
Setting and time |
This scenario wascarried out in a school setting, in one session. |
|
Variation |
The activity can also include more participants to promote cooperative play. |
|
Reference: [54], 2016 |
Name of Scenario: Shopping_2 |
|
Objectives |
Identification of sentence and words pronunciation, transferring skills in life. |
|
Treatment domain, Type of CD |
Language domain, Language disorder due to hearing impairment. |
|
Treatment technique |
Identification of sentence; categorization of words according to a certain criterion; Sign Language interpreter helps with the instructions if the child need. |
|
Play type (social ∣ cognitive) |
Cognitive play. |
|
Interaction technique |
Peer interaction. |
|
Participants’ role and behavior |
There are three participants in this scenario, a speech and language therapist (mediator), social robot (instructor), and the child with hearing impairment. |
|
Age |
5–15 years |
|
Activity description |
[54], page 258 |
|
Robot configuration and mode of operation |
A social robot NAO and toys. |
|
Used software |
NAOqi software v.2.8.6.23 |
|
Setting and time |
This scenario was carried out in a school setting, in one session. |
|
Variation |
The activity can also include more participants to promote cooperative play. |
|
Reference: [55], 2016 |
Name of Scenario: Order a doughnut |
|
Objectives |
How to order a doughnut from a menu in a doughnut shop, transferring skills in life. |
|
Treatment domain, Type of CD |
Language domain, ASD. |
|
Treatment technique |
Imitation of actions and words. |
|
Play type (social ∣ cognitive) |
Social play. |
|
Interaction technique |
Child–robot interaction. |
|
Participants’ role and behavior |
The child’s family, the robot programmer, the special education teacher, social robot NAO, and the child. |
|
Age |
6 years old |
|
Activity description |
[55], page 132–133 |
|
Robot configuration and mode of operation |
A social robot NAO and a menu |
|
Used software |
NAOqi software v.2.8.6.23 |
|
Setting and time |
This scenario was carried out at subject’s home, in two sessions. |
|
Variation |
- |
|
Reference: [55], 2016 |
Name of Scenario: Joint Attention |
|
Objectives |
Joint attention skills |
|
Treatment domain, Type of CD |
Joint attention; Developmental Delay and Speech-Language Impairments. |
|
Treatment technique |
Understanding instructions. |
|
Play type (social ∣ cognitive) |
Social play. |
|
Interaction technique |
Child–robot interaction. |
|
Participants’ role and behavior |
The robot programmer, the speech and language pathologist, social robot NAO, and two children. |
|
Age |
7 and 9 years old |
|
Activity description |
[55], page 135 |
|
Robot configuration and mode of operation |
A social robot NAO and objects in speech and language pathologist’s office. |
|
Used software |
NAOqi software v.2.8.6.23 |
|
Setting and time |
This scenario was carried out at speech and language pathologist’s office in five sessions. |
|
Variation |
After each session, the modification of the robot behaviors were designed according to the child’s needs. |
|
Reference: [55], 2016 |
Name of Scenario: Joint Attention, Turn-Taking, Initiative |
|
Objectives |
Joint attention, introduction of turn-taking and initiative skills |
|
Treatment domain, Type of CD |
Language domain, Speech-Language Impairment. |
|
Treatment technique |
Imitation of actions and sentences. |
|
Play type (social ∣ cognitive) |
Social play. |
|
Interaction technique |
Child–robot interaction. |
|
Participants’ role and behavior |
The robot operator, the speech and language pathologist, social robot NAO, and a child |
|
Age |
7 years |
|
Activity description |
[55], page 136–137 |
|
Robot configuration and mode of operation |
A social robot NAO and cue cards. |
|
Used software |
NAOqi software v.2.8.6.23 |
|
Setting and time |
This scenario was carried out at school’s playroom, in eight months, twice a week sessions. |
|
|
Playing the game without the cue cards. |
|
Reference: [49], 2015 |
Name of Scenario: Auditory Memory Stimulation, Comprehensive Reading, Visual Stimulation, Stimulation of Motor Skills |
|
Objectives |
To offer a robotic assistant able to provide support for Speech Language Practitioners. |
|
Treatment domain, Type of CD |
Autism spectrum disorder, Down syndrome, Cerebral Palsy, Mild and Moderate Intellectual Disability, Epilepsy, Unspecified intellectual disabilities, other disabilities. |
|
Treatment technique |
Interactive therapy exercises, assessment tasks. |
|
Play type |
Social and cognitive. |
|
Interaction technique |
Therapist–patient interaction via an intelligent integrative environment. |
|
Age |
- |
|
Participants’ role and behavior |
The participants in this scenario are the therapist, the children, the robotic assistant (the model can be used by relatives and students, too). |
|
Activity description |
[49], page 75 |
|
Robot configuration and mission |
RAMSES (v.2)—an intelligent environment that uses mobile devices, embedded electronic systems, and a robotic assistant. The robotic assistant consists of a central processor (an Android smartphone or tablet, or an embedded electronic system) and a displacement. |
|
Used software |
Electronic platform. |
|
Setting and time |
This is a pilot study, conducted in clinical settings over multiple activities. |
|
Variation |
The proposed model relies on different ICT tools, knowledge structures, and functionalities. |
|
Reference: [56], 2014 |
Name of Scenario: The impact of humanoid robots in teaching sign languages |
|
Objectives |
Teaching Sign Language |
|
Treatment domain, Type of CD |
Language domain, Language disorder due to hearing impairment. |
|
Treatment technique |
Demonstration of sign language and special flashcards illustrating the signs. |
|
Play type (social ∣ cognitive) |
Cognitive play. |
|
Interaction technique |
Child–robot interaction. |
|
Age |
9–16 years (10 children hearing impairment). |
|
Participants’ role and behavior |
Individual and group sessions of a therapist in sign language, a social robot, and a child/ children. |
|
Activity description |
[56], page 1124–1125 |
|
Robot configuration and mission |
A social robot Robovie R3 and pictures of sings. |
|
Used software |
Robovie Maker 2 software (v.1.4). |
|
Setting and time |
This scenario was carried out in a computer laboratory, in one session. |
|
Variation |
Individual or group sessions. |
|
Reference: [57], 2014 |
Name of Scenario: Sign Language Game for Beginners |
|
Objectives |
Learning signs from Turkish Sign Language |
|
Treatment domain, Type of CD |
Language domain, Language disorder due to hearing impairment. |
|
Treatment technique |
Identification of words in Turkish Sign Language for beginners’ level (children of early age group), most frequently used daily signs. |
|
Play type (social ∣ cognitive) |
Cognitive play. |
|
Interaction technique |
Child–robot interaction. |
|
Age |
Average age of 10:6 (years:months) |
|
Participants’ role and behavior |
There are two participants in this scenario, the typically developed child and a humanoid social robot (instructor). |
|
Activity description |
[57], page 523, 525 |
|
Robot configuration and mission |
A social robot NAO H25 and a modified Robovie R3 robot. |
|
Used software |
NAOqi software v.2.8.6.23 |
|
Setting and time |
This scenario wa carried out in a university setting for one session. |
|
Variation |
The game can also be played with children with hearing impairment. |
Table 2 presents interactive scenarios with SARs described in empirical use cases.
Table 2. Description of human–robot interactive scenarios—empirical.
|
A summary of the results is presented in Figure 1. In conclusion, over the years, empirical studies have increased, while the pilot studies have decreased. More experimental studies will facilitate the establishment of standards and common methodology on how to apply SARs in SLT. At the same time, there is an emerging trend in publications offering only models and interactive scenarios with SARs without experiments. This provides directions for future studies.
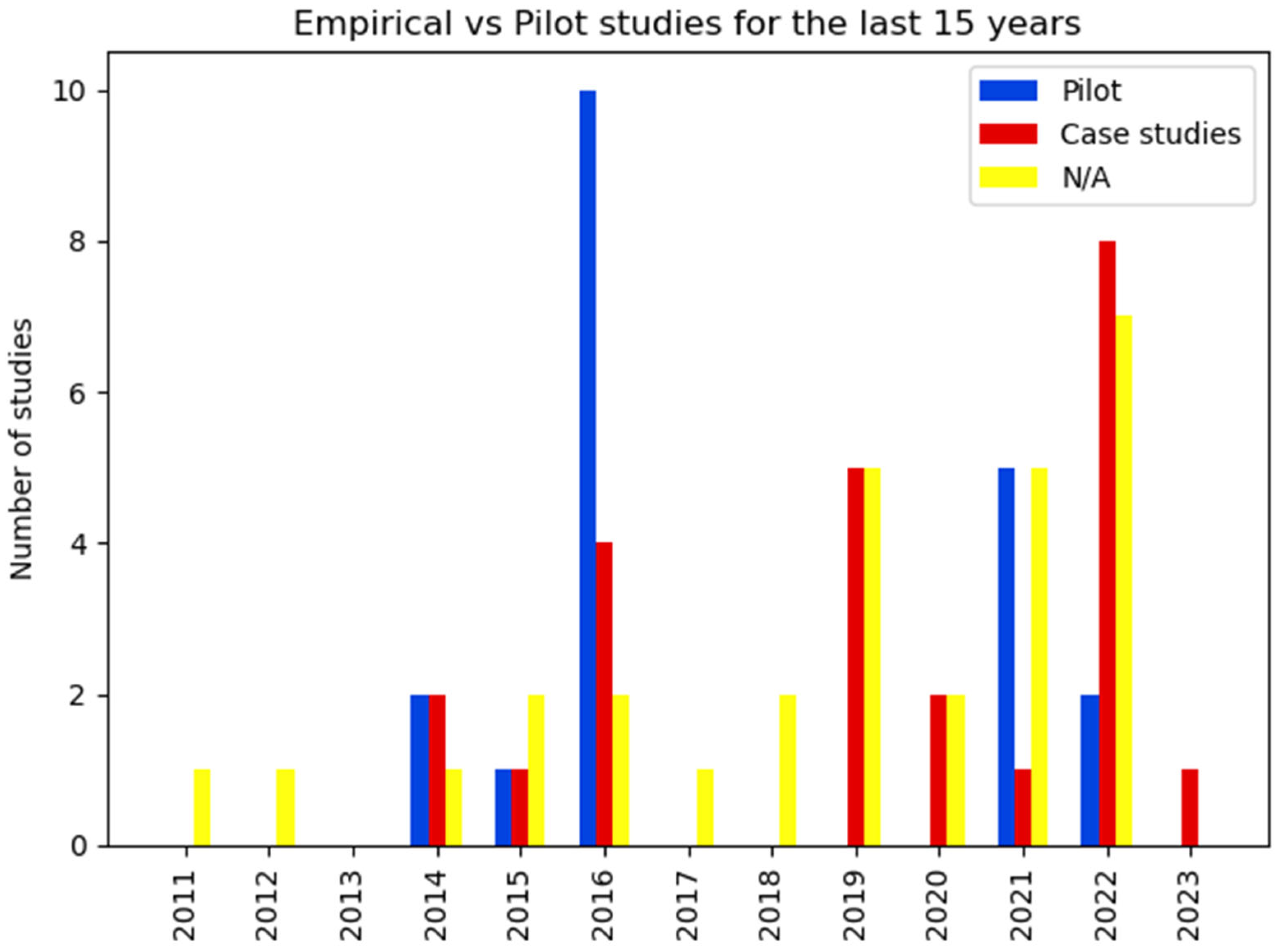
Figure 1. The number of published articles for the empirical vs. pilot studies for the last 15 years.
The types of communication disorders (Figure 2) indicated in the studies mentioned are few, such as dyslexia, dysgraphia, specific language impairment, and dyslalia. The number of articles where the participation of team speech therapists is included is small and for this reason, the authors have preferred to describe the primary disorder, for example, ASD, cerebral palsy, or hearing impairment. All these conditions have different kinds of communication disorders. They belong to the category of neurodevelopmental disorders; in most of them, the language acquisition is affected at different levels and it varies in severity.
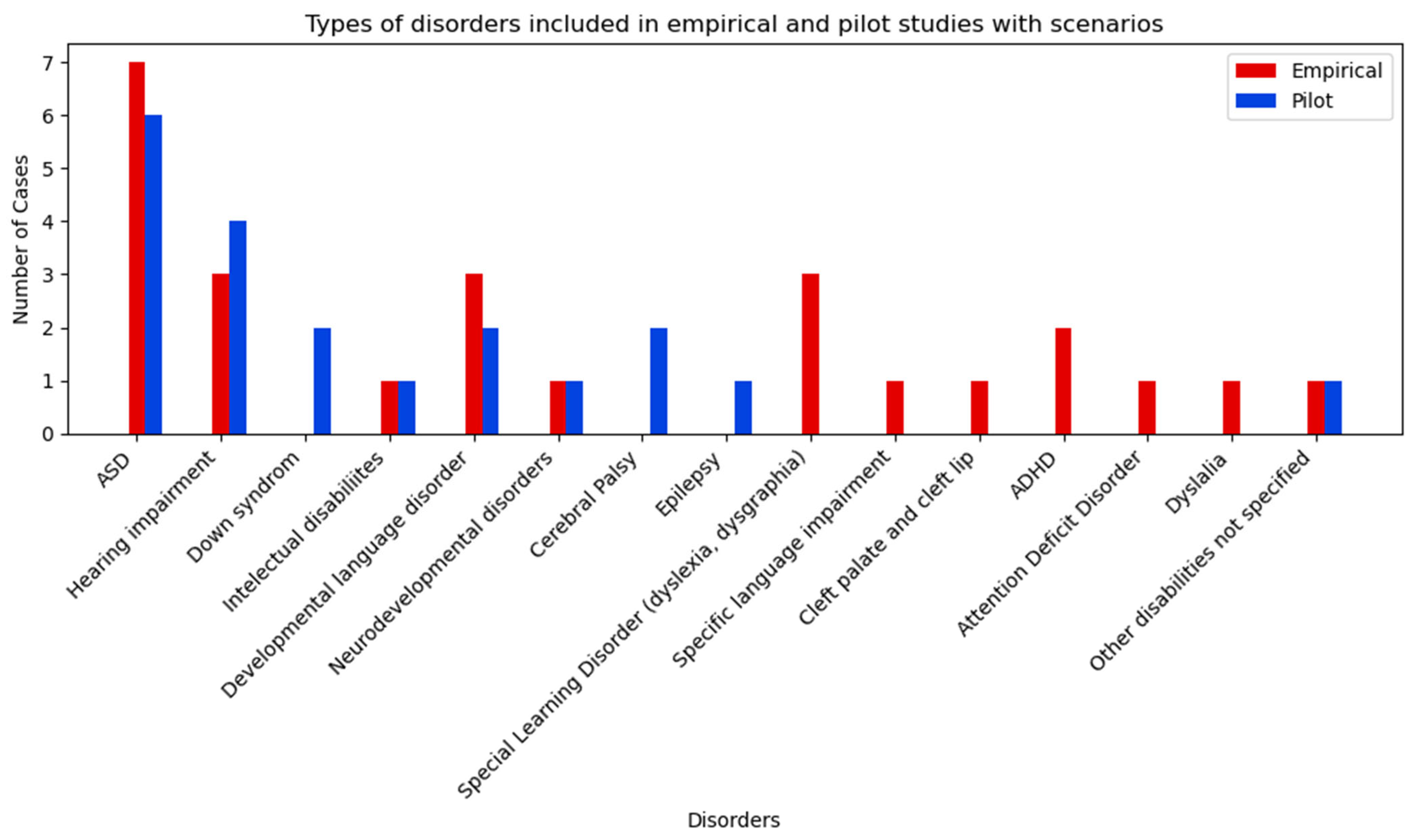
Figure 2. Summary of types of disorders.
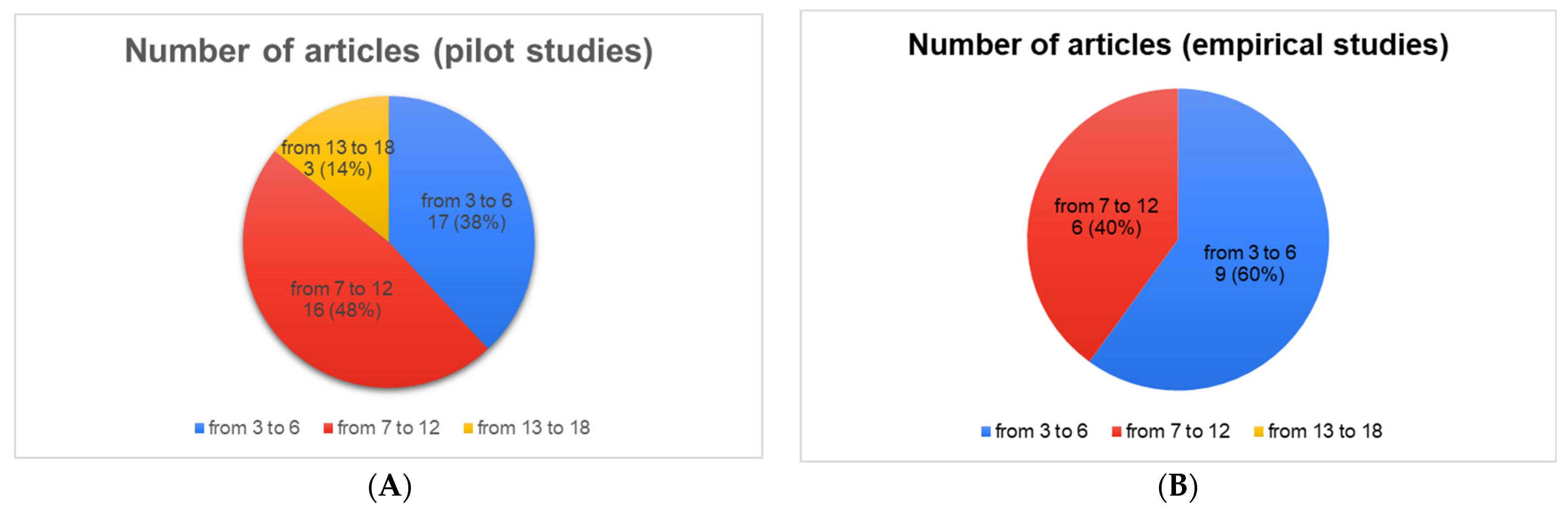
Figure 3. Age of the participants interacting with robots in the studies (A) in pilot studies (B) in case studies.
| Communication Objectives | References | Number of Articles |
|---|---|---|
| Joint attention | [41][43][47][48][58] | 6 |
| Turn-taking | [68][6][41][43][47][48][58] | 8 |
| Imitation/repetition | [41][43][45][48][49][65][48][66][58] | 9 |
| Sign recognition/understanding/receptive vocabulary | [52][54][56][57] | 4 |
| Sign production/expressive vocabulary | [56] | 1 |
| Sound and speech sound recognition | [68][39][40][44][48][49][54][62][66] | 9 |
| Speech recognition/receptive vocabulary | [68][39][59][41][46][47][48][49][54][62][58] | 13 |
| Speech production/expressive vocabulary | [68][40][41][60][43][46][47][49][50][52][54][62][66] | 13 |
| Morphosyntax skills | [67][68][59][60][46][64][49][50][65][66] | 10 |
| Functional communication/maintain conversation/ pragmatic skills | [68][6][60][46][49][50][65][55][62][66] | 10 |
| Socially Assistive Robot | Articles |
|---|---|
| NAO | 27 |
| Custom made 3D-printed/Arduino-based robot (low cost) | 8 |
| Probo (low cost) | 3 |
| Robovie R3 (high cost) | 2 |
| iRobi (high cost) | 2 |
| Cozmo (low cost) | 1 |
| SPELTRA (low cost) | 1 |
| CuDDler (low cost) | 1 |
| CASPER | 1 |
| RASA | 1 |
| MARIA T21 | 1 |
| QTrobot (high cost) | 1 |
| Pepper (high cost) | 1 |
3. Conclusions
This entry is adapted from the peer-reviewed paper 10.3390/machines11070693
References
- World Health Organization; United Nations Children’s Fund (UNICEF). Global Report on Assistive Technology; World Health Organization: Geneva, Switzerland, 2022; Available online: https://www.unicef.org/reports/global-report-assistive-technology (accessed on 16 April 2023).
- Papadopoulou, M.T.; Karageorgiou, E.; Kechayas, P.; Geronikola, N.; Lytridis, C.; Bazinas, C.; Kourampa, E.; Avramidou, E.; Kaburlasos, V.G.; Evangeliou, A.E. Efficacy of a Robot-Assisted Intervention in Improving Learning Performance of Elementary School Children with Specific Learning Disorders. Children 2022, 9, 1155.
- Robins, B.; Dautenhahn, K.; Ferrari, E.; Kronreif, G.; Prazak-Aram, B.; Marti, P.; Laudanna, E. Scenarios of robot-assisted play for children with cognitive and physical disabilities. Interact. Stud. 2012, 13, 189–234.
- Estévez, D.; Terrón-López, M.-J.; Velasco-Quintana, P.J.; Rodríguez-Jiménez, R.-M.; Álvarez-Manzano, V. A Case Study of a Robot-Assisted Speech Therapy for Children with Language Disorders. Sustainability 2021, 13, 2771.
- Ioannou, A.; Andreva, A. Play and Learn with an Intelligent Robot: Enhancing the Therapy of Hearing-Impaired Children. In Proceedings of the IFIP Conference on Human-Computer Interaction—INTERACT 2019. INTERACT 2019. Lecture Notes in Computer Science, Paphos, Cyprus, 2–6 September 2019; Springer: Cham, Switzerland, 2019; Volume 11747.
- Hawon, L.; Hyun, E. The Intelligent Robot Contents for Children with Speech-Language Disorder. J. Educ. Technol. Soc. 2015, 18, 100–113. Available online: http://www.jstor.org/stable/jeductechsoci.18.3.100 (accessed on 16 April 2023).
- Lekova, A.; Andreeva, A.; Simonska, M.; Tanev, T.; Kostova, S. A system for speech and language therapy with a potential to work in the IoT. In Proceedings of the CompSysTech ‘22: International Conference on Computer Systems and Technologies 2022, Ruse, Bulgaria, 17–18 June 2022; pp. 119–124.
- QTrobot for Education of Children with Autism and Other Special Needs. Available online: https://luxai.com/assistive-tech-robot-for-special-needs-education/ (accessed on 16 April 2023).
- Vukliš, D.; Krasnik, R.; Mikov, A.; Zvekić Svorcan, J.; Janković, T.; Kovačević, M. Parental Attitudes Towards The Use Of Humanoid Robots In Pediatric (Re)Habilitation. Med. Pregl. 2019, 72, 302–306.
- Szymona, B.; Maciejewski, M.; Karpiński, R.; Jonak, K.; Radzikowska-Büchner, E.; Niderla, K.; Prokopiak, A. Robot-Assisted Autism Therapy (RAAT). Criteria and Types of Experiments Using Anthropomorphic and Zoomorphic Robots. Review of the Research. Sensors 2021, 21, 3720.
- Nicolae, G.; Vlãdeanu, G.; Saru, L.M.; Burileanu, C.; Grozãvescu, R.; Craciun, G.; Drugã, S.; Hãþiş, M. Programming The Nao Humanoid Robot For Behavioral Therapy In Romania. Rom. J. Child Amp Adolesc. Psychiatry 2019, 7, 23–30.
- Gupta, G.; Chandra, S.; Dautenhahn, K.; Loucks, T. Stuttering Treatment Approaches from the Past Two Decades: Comprehensive Survey and Review. J. Stud. Res. 2022, 11, 1–24.
- Chandra, S.; Gupta, G.; Loucks, T.; Dautenhahn, K. Opportunities for social robots in the stuttering clinic: A review and proposed scenarios. Paladyn J. Behav. Robot. 2022, 13, 23–44.
- Bonarini, A.; Clasadonte, F.; Garzotto, F.; Gelsomini, M.; Romero, M. Playful interaction with Teo, a Mobile Robot for Children with Neurodevelopmental Disorders. DSAI 2016. In Proceedings of the 7th International Conference on Software Development and Technologies for Enhancing Accessibility and Fighting Info-exclusion, Portugal, 1–3 December 2016; pp. 223–231.
- Kose, H.; Yorganci, R. Tale of a robot: Humanoid Robot Assisted Sign Language Tutoring. In Proceedings of the 2011 11th IEEE-RAS International Conference on Humanoid Robots, Bled, Slovenia, 26–28 October 2011; pp. 105–111.
- Robles-Bykbaev, V.; López-Nores, M.; Pazos-Arias, J.; Quisi-Peralta, D.; García-Duque, J. An Ecosystem of Intelligent ICT Tools for Speech-Language Therapy Based on a Formal Knowledge Model. Stud. Health Technol. Inform. 2015, 216, 50–54.
- Fosch-Villaronga, E.; Millard, C. Cloud Robotics Law and Regulation, Challenges in the Governance of Complex and Dynamic Cyber-Physical Ecosystems. Robot. Auton. Syst. 2019, 119, 77–91.
- Samaddar, S.; Desideri, L.; Encarnação, P.; Gollasch, D.; Petrie, H.; Weber, G. Robotic and Virtual Reality Technologies for Children with Disabilities and Older Adults. In Computers Helping People with Special Needs. ICCHP-AAATE 2022. Lecture Notes in Computer Science; Miesenberger, K., Kouroupetroglou, G., Mavrou, K., Manduchi, R., Covarrubias Rodriguez, M., Penáz, P., Eds.; Springer: Cham, Switzerland, 2022; Volume 13342.
- da Silva, C.A.; Fernandes, A.R.; Grohmann, A.P. STAR: Speech Therapy with Augmented Reality for Children with Autism Spectrum Disorders. In Enterprise Information Systems. ICEIS 2014. Lecture Notes in Business Information Processing; Cordeiro, J., Hammoudi, S., Maciaszek, L., Camp, O., Filipe, J., Eds.; Springer: Cham, Switzerland, 2015; Volume 227.
- Lorenzo, G.; Lledó, A.; Pomares, J.; Roig, R. Design and application of an immersive virtual reality system to enhance emotional skills for children with autism spectrum disorders. Comput. Educ. 2016, 98, 192–205.
- Kotsopoulos, K.I.; Katsounas, M.G.; Sofios, A.; Skaloumbakas, C.; Papadopoulos, A.; Kanelopoulos, A. VRESS: Designing a platform for the development of personalized Virtual Reality scenarios to support individuals with Autism. In Proceedings of the 2021 12th International Conference on Information, Intelligence, Systems & Applications (IISA), Vila Real, Portugal, 1–3 December 2016; pp. 1–4.
- Furhat and Social Robots in Rehabilitation. Available online: https://furhatrobotics.com/habilitation-concept/ (accessed on 16 April 2023).
- Charron, N.; Lindley-Soucy, E.D.K.; Lewis, L.; Craig, M. Robot therapy: Promoting Communication Skills for Students with Autism Spectrum Disorders. New Hampshire J. Edu. 2019, 21, 10983.
- Silvera-Tawil, D.; Bradford, D.; Roberts-Yates, C. Talk to me: The role of human–robot interaction in improving verbal communication skills in students with autism or intellectual disability. In Proceedings of the 2018 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Nanjing, China, 27–31 August 2018; pp. 1–6.
- Syrdal, D.S.; Dautenhahn, K.; Robins, B.; Karakosta, E.; Jones, N.C. Kaspar in the wild: Experiences from deploying a small humanoid robot in a nursery school for children with autism. Paladyn J. Behav. Robot. 2020, 11, 301–326.
- Robles-Bykbaev, V.; Ochoa-Guaraca, M.; Carpio-Moreta, M.; Pulla-Sánchez, D.; Serpa-Andrade, L.; López-Nores, M.; García-Duque, J. Robotic assistant for support in speech therapy for children with cerebral palsy. In Proceedings of the 2016 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 9–11 November 2016; pp. 1–6.
- Pereira, J.; de Melo, M.; Franco, N.; Rodrigues, F.; Coelho, A.; Fidalgo, R. Using assistive robotics for aphasia rehabilitation, in: 2019 Latin American Robotics Symposium (LARS), 2019. In Proceedings of the Brazilian Symposium on Robotics (SBR) and 2019 Workshop on Robotics in Education (WRE), Rio Grande, Brazil, 23–25 October 2019; pp. 387–392.
- Castillo, J.C.; Alvarez-Fernandez, D.; Alonso-Martin, F.; Marques-Villarroya, S.; Salichs, M.A. Social robotics in therapy of apraxia of speech. J. Healthcare Eng. 2018, 2018, 11.
- Kwaśniewicz, Ł.; Kuniszyk-Jóźkowiak, W.; Wójcik, G.M.; Masiak, J. Adaptation of the humanoid robot to speech disfluency therapy. Bio-Algorithms Med-Syst. 2016, 12, 169–177.
- Cifuentes, C.; Pinto, M.J.; Céspedes, N.; Múnera, M. Social Robots in Therapy and Care. Curr. Robot. Rep. 2020, 1, 59–74.
- Robins, B.; Dautenhahn, K.; Ferrari, E.; Kronreif, G.; Prazak-Aram, B.; Marti, P.; Laudanna, E. Scenarios of robot-assisted play for children with cognitive and physical disabilities. Interact. Stud. 2012, 13, 189–234.
- Chandra, S.; Gupta, G.; Loucks, T.; Dautenhahn, K. Opportunities for social robots in the stuttering clinic: A review and proposed scenarios. Paladyn J. Behav. Robot. 2022, 13, 23–44.
- Kwaśniewicz, Ł.; Kuniszyk-Jóźkowiak, W.; Wójcik, G.M.; Masiak, J. Adaptation of the humanoid robot to speech disfluency therapy. Bio-Algorithms Med-Syst. 2016, 12, 169–177.
- Alabdulkareem, A.; Alhakbani, N.; Al-Nafjan, A. A Systematic Review of Research on Robot-Assisted Therapy for Children with Autism. Sensors 2022, 22, 944.
- Fisicaro, D.; Pozzi, F.; Gelsomini, M.; Garzotto, F. Engaging Persons with Neuro-Developmental Disorder with a Plush Social Robot. In Proceedings of the 2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Daegu, Republic of Korea, 11–14 March 2019; pp. 610–611.
- Gibson, J.L.; Pritchard, E.; de Lemos, C. Play-based interventions to support social and communication development in autistic children aged 2–8 years: A scoping review. Autism Dev. Lang. Impair. 2021, 6, 1–30.
- Baker, F.S. Engaging in play through assistive technology: Closing gaps in research and practice for infants and toddlers with disabilities. In Assistive Technology Research, Practice, and Theory; IGI Global: Hershey, PA, USA, 2014; pp. 207–221.
- Francis, G.; Deniz, E.; Torgerson, C.; Toseeb, U. Play-based interventions for mental health: A systematic review and meta-analysis focused on children and adolescents with autism spectrum disorder and developmental language disorder. Autism Dev. Lang. Impair. 2022, 7, 1–44.
- Ioannou, A.; Andreva, A. Play and Learn with an Intelligent Robot: Enhancing the Therapy of Hearing-Impaired Children. In Proceedings of the IFIP Conference on Human-Computer Interaction—INTERACT 2019. INTERACT 2019. Lecture Notes in Computer Science, Paphos, Cyprus, 2–6 September 2019; Springer: Cham, Switzerland, 2019; Volume 11747.
- Lekova, A.; Andreeva, A.; Simonska, M.; Tanev, T.; Kostova, S. A system for speech and language therapy with a potential to work in the IoT. In Proceedings of the CompSysTech ‘22: International Conference on Computer Systems and Technologies 2022, Ruse, Bulgaria, 17–18 June 2022; pp. 119–124.
- Syrdal, D.S.; Dautenhahn, K.; Robins, B.; Karakosta, E.; Jones, N.C. Kaspar in the wild: Experiences from deploying a small humanoid robot in a nursery school for children with autism. Paladyn J. Behav. Robot. 2020, 11, 301–326.
- Castillo, J.C.; Alvarez-Fernandez, D.; Alonso-Martin, F.; Marques-Villarroya, S.; Salichs, M.A. Social robotics in therapy of apraxia of speech. J. Healthcare Eng. 2018, 2018, 11.
- Kajopoulos, J.; Wong, A.H.Y.; Yuen, A.W.C.; Dung, T.A.; Kee, T.Y.; Wykowska, A. Robot-Assisted Training of Joint Attention Skills in Children Diagnosed with Autism. In Social Robotics. ICSR 2015. Lecture Notes in Computer Science; Tapus, A., André, E., Martin, J.C., Ferland, F., Ammi, M., Eds.; Springer: Cham, Switzerland, 2015; Volume 9388.
- Taheri, A.; Meghdari, A.; Alemi, M.; Pouretemad, H.; Poorgoldooz, P.; Roohbakhsh, M. Social Robots and Teaching Music to Autistic Children: Myth or Reality? In Social Robotics. ICSR 2016. Lecture Notes in Computer Science; Agah, A., Cabibihan, J.J., Howard, A., Salichs, M., He, H., Eds.; Springer: Cham, Switzerland, 2016; Volume 9979.
- Tariq, S.; Baber, S.; Ashfaq, A.; Ayaz, Y.; Naveed, M.; Mohsin, S. Interactive Therapy Approach Through Collaborative Physical Play Between a Socially Assistive Humanoid Robot and Children with Autism Spectrum Disorder. In Social Robotics. ICSR 2016. Lecture Notes in Computer Science; Agah, A., Cabibihan, J.J., Howard, A., Salichs, M., He, H., Eds.; Springer: Cham, Switzerland, 2016; Volume 9979.
- Egido-García, V.; Estévez, D.; Corrales-Paredes, A.; Terrón-López, M.-J.; Velasco-Quintana, P.-J. Integration of a Social Robot in a Pedagogical and Logopedic Intervention with Children: A Case Study. Sensors 2020, 20, 6483.
- Jeon, K.H.; Yeon, S.J.; Kim, Y.T.; Song, S.; Kim, J. Robot-based augmentative and alternative communication for nonverbal children with communication disorders. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing (UbiComp ‘14), Seattle, Washington, USA, 13–17 September 2014; Association for Computing Machinery: New York, NY, USA, 2014; pp. 853–859.
- Panceri, J.A.C.; Freitas, É.; de Souza, J.C.; da Luz Schreider, S.; Caldeira, E.; Bastos, T.F. A New Socially Assistive Robot with Integrated Serious Games for Therapies with Children with Autism Spectrum Disorder and Down Syndrome: A Pilot Study. Sensors 2021, 21, 8414.
- Robles-Bykbaev, V.E.; Lopez-Nores, M.; Pazos-Arias, J.J.; Garcia-Duque, J. RAMSES: A robotic assistant and a mobile support environment for speech and language therapy. In Proceedings of the Fifth International Conference on the Innovative Computing Technology (INTECH 2015), Galcia, Spain, 20–22 May 2015; pp. 1–4.
- Ochoa-Guaraca, M.; Carpio-Moreta, M.; Serpa-Andrade, L.; Robles-Bykbaev, V.; Lopez-Nores, M.; Duque, J.G. A robotic assistant to support the development of communication skills of children with disabilities. In Proceedings of the 2016 IEEE 11th Colombian Computing Conference (CCC), Popayan, Colombia, 27–30 September 2016; pp. 1–8.
- van den Berk-Smeekens, I.; van Dongen-Boomsma, M.; De Korte, M.W.P.; Boer, J.C.D.; Oosterling, I.J.; Peters-Scheffer, N.C.; Buitelaar, J.K.; Barakova, E.I.; Lourens, T.; Staal, W.G.; et al. Adherence and acceptability of a robot-assisted Pivotal Response Treatment protocol for children with autism spectrum disorder. Sci. Rep. 2020, 10, 8110.
- Lekova, A.; Kostadinova, A.; Tsvetkova, P.; Tanev, T. Robot-assisted psychosocial techniques for language learning by hearing-impaired children. Int. J. Inf. Technol. Secur. 2021, 13, 63–76.
- Simut, R.E.; Vanderfaeillie, J.; Peca, A.; Van de Perre, G.; Vanderborght, B. Children with Autism Spectrum Disorders Make a Fruit Salad with Probo, the Social Robot: An Interaction Study. J. Autism. Dev. Disord. 2016, 46, 113–126.
- Polycarpou, P.; Andreeva, A.; Ioannou, A.; Zaphiris, P. Don’t Read My Lips: Assessing Listening and Speaking Skills Through Play with a Humanoid Robot. In HCI International 2016—Posters’ Extended Abstracts. HCI 2016. Communications in Computer and Information Science; Stephanidis, C., Ed.; Springer: Cham, Switzerland, 2016; Volume 618.
- Lewis, L.; Charron, N.; Clamp, C.; Craig, M. Co-robot therapy to foster social skills in special need learners: Three pilot studies. In Methodologies and Intelligent Systems for Technology Enhanced Learning: 6th International Conference; Springer International Publishing: Berlin/Heidelberg, Germany, 2016; pp. 131–139.
- Akalin, N.; Uluer, P.; Kose, H. Non-verbal communication with a social robot peer: Towards robot assisted interactive sign language tutoring. In Proceedings of the 2014 IEEE-RAS International Conference on Humanoid Robots, Madrid, Spain, 18–20 November 2014; pp. 1122–1127.
- Özkul, A.; Köse, H.; Yorganci, R.; Ince, G. Robostar: An interaction game with humanoid robots for learning sign language. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), Bali, Indonesia, 5–10 December 2014; pp. 522–527.
- Boccanfuso, L.; Scarborough, S.; Abramson, R.K.; Hall, A.V.; Wright, H.H.; O’kane, J.M. A low-cost socially assistive robot and robot-assisted intervention for children with autism spectrum disorder: Field trials and lessons learned. Auton Robot 2016, 41, 637–655.
- Charron, N.; Lindley-Soucy, E.D.K.; Lewis, L.; Craig, M. Robot therapy: Promoting Communication Skills for Students with Autism Spectrum Disorders. New Hampshire J. Edu. 2019, 21, 10983.
- Robles-Bykbaev, V.; Ochoa-Guaraca, M.; Carpio-Moreta, M.; Pulla-Sánchez, D.; Serpa-Andrade, L.; López-Nores, M.; García-Duque, J. Robotic assistant for support in speech therapy for children with cerebral palsy. In Proceedings of the 2016 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 9–11 November 2016; pp. 1–6.
- Pereira, J.; de Melo, M.; Franco, N.; Rodrigues, F.; Coelho, A.; Fidalgo, R. Using assistive robotics for aphasia rehabilitation, in: 2019 Latin American Robotics Symposium (LARS), 2019. In Proceedings of the Brazilian Symposium on Robotics (SBR) and 2019 Workshop on Robotics in Education (WRE), Rio Grande, Brazil, 23–25 October 2019; pp. 387–392.
- Andreeva, A.; Lekova, A.; Simonska, M.; Tanev, T. Parents’ Evaluation of Interaction Between Robots and Children with Neurodevelopmental Disorders. In Smart Education and e-Learning—Smart Pedagogy. SEEL-22 2022. Smart Innovation, Systems and Technologies; Uskov, V.L., Howlett, R.J., Jain, L.C., Eds.; Springer: Singapore, 2022; Volume 305.
- Gupta, G.; Chandra, S.; Dautenhahn, K.; Loucks, T. Stuttering Treatment Approaches from the Past Two Decades: Comprehensive Survey and Review. J. Stud. Res. 2022, 11, 1–24.
- Spitale, M.; Silleresi, S.; Leonardi, G.; Arosio, F.; Giustolisi, B.; Guasti, M.T.; Garzotto, F. Design Patterns of Technology-based Therapeutic Activities for Children with Language Impairments: A Psycholinguistic-Driven Approach, 2021. In Proceedings of the CHI EA ‘21: Extended Abstracts of the 2021 CHI Virtual Conference on Human Factors in Computing Systems, Yokohama, Japan, 8–13 May 2021; pp. 1–7.
- Farhan, S.A.; Rahman Khan, M.N.; Swaron, M.R.; Saha Shukhon, R.N.; Islam, M.M.; Razzak, M.A. Improvement of Verbal and Non-Verbal Communication Skills of Children with Autism Spectrum Disorder using Human Robot Interaction. In Proceedings of the 2021 IEEE World AI IoT Congress (AIIoT), Seattle, WA, USA, 10–13 May 2021; pp. 356–359.
- Esfandbod, A.; Rokhi, Z.; Meghdari, A.F.; Taheri, A.; Alemi, M.; Karimi, M. Utilizing an Emotional Robot Capable of Lip-Syncing in Robot-Assisted Speech Therapy Sessions for Children with Language Disorders. Int. J. Soc. Robot. 2023, 15, 165–183.
- Papadopoulou, M.T.; Karageorgiou, E.; Kechayas, P.; Geronikola, N.; Lytridis, C.; Bazinas, C.; Kourampa, E.; Avramidou, E.; Kaburlasos, V.G.; Evangeliou, A.E. Efficacy of a Robot-Assisted Intervention in Improving Learning Performance of Elementary School Children with Specific Learning Disorders. Children 2022, 9, 1155.
- Estévez, D.; Terrón-López, M.-J.; Velasco-Quintana, P.J.; Rodríguez-Jiménez, R.-M.; Álvarez-Manzano, V. A Case Study of a Robot-Assisted Speech Therapy for Children with Language Disorders. Sustainability 2021, 13, 2771.