Energy storage is one of the major barriers to achieve long-duration autonomy in robots. This entry evaluates the capabilities of relevant battery technologies, taking into consideration the requirements of different applications in robotics. Researchers also discuss additional technologies that can be used to overcome the inherent limitations of the most common battery chemistries.
- batteries
- robotics
- design engineering
- mobile robots
- space robots
1. Introduction
2. Current Battery Technologies
| LCO | Lithium Cobalt Oxide (LiCO2) |
| LFP | Lithium Iron Phosphate (LiFePO4) |
| LMO | Lithium Manganese Oxide (LiMn2O4) |
| LiPo | Lithium-ion Polymer |
| NCA | Lithium Nickel-Cobalt-Aluminum Oxide (LiNiCoAlO2) |
| NMC | Lithium Nickel-Manganese-Cobalt Oxide (LiNiMnCoO2) |
| LiS | Lithium Sulphur |
| LTO | Lithium Titanate (Li2TiO3) |
| Ni-MH | Nickel-Metal-Hydride |
3. Capability Analysis of Battery Technologies for Robotic Applications
3.1. Battery-powered robots
- (1)
-
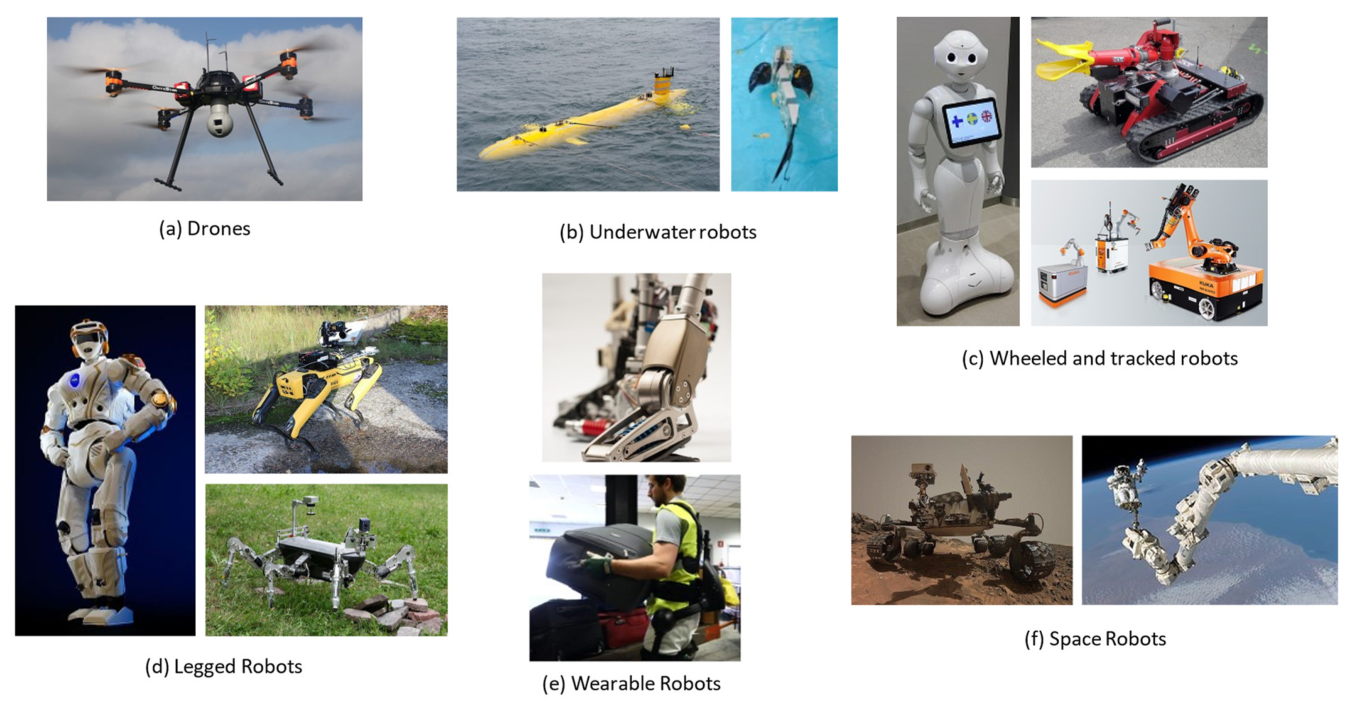
Space robots: the two main types of robots present in space missions are orbital and planetary robots, both having the possibility to carry robotic arms for manipulation [26].
- (2)
-
Drones: these are typically fixed-wing and multi-rotor drones.
- (3)
-
Underwater robots, more specifically Autonomous Underwater Vehicles (AUVs): These have electric motors on board to actuate their control surfaces (rudders and sterns), actuators for manipulation (robotic arms), in some cases, the thruster. Less conventional, non-commercial solutions such as snake robots, jellyfish robots or swimming (fish-like) robots are also usually actuated by electric motors [27].
- (4)
-
Wheeled and tracked mobile robots: Most unmanned ground vehicles (UGVs) fall under this category, but many other mobile robots also fit this description. The well-known humanoid robot Pepper, for example, can also be classified as a wheeled robot [28].
- (5)
- (6)
-
Wearable robots: This category includes powered prostheses and active exoskeletons, which exist for both upper and lower limbs. Exoskeletons can fulfill different functions: they can assist the wearer or augment his/her capabilities, at home or in industrial settings, or they can be used for rehabilitation purposes [32].
3.2. Suitability of Battery Chemistries
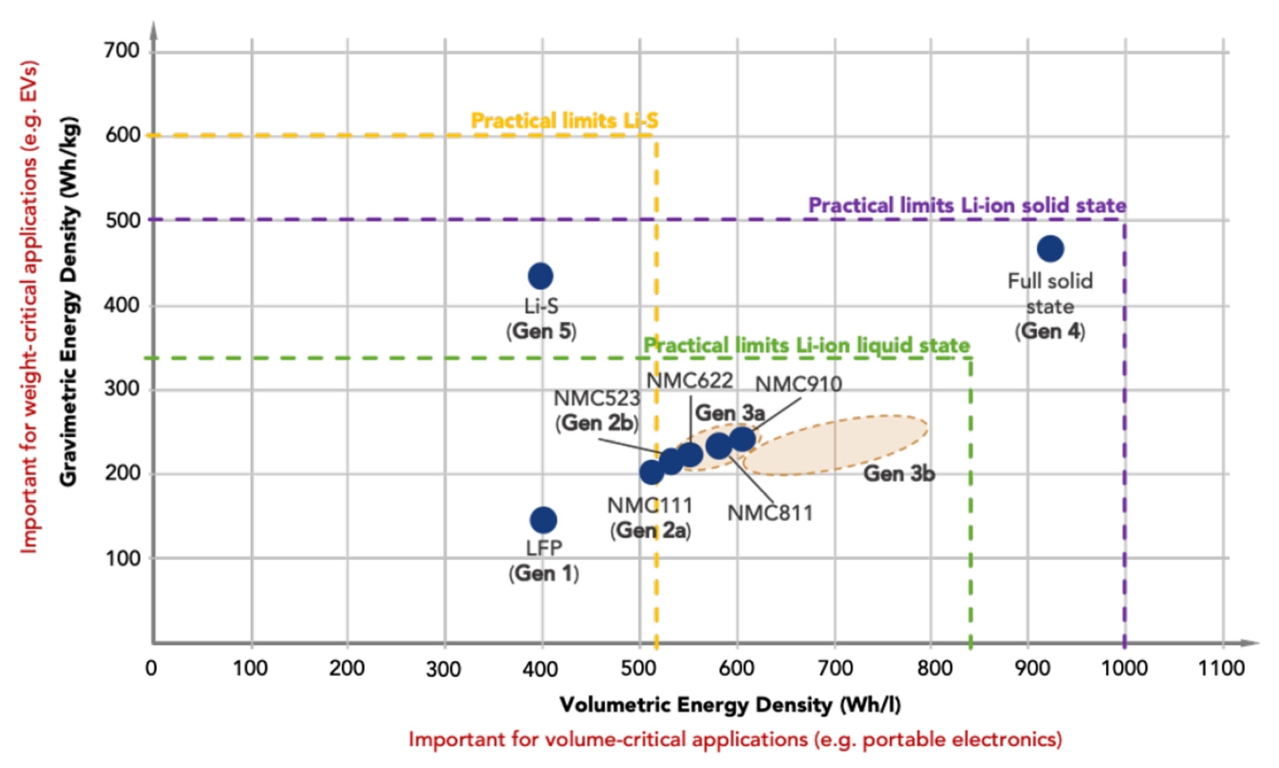
It is important to note that tailor-made solutions and specificities of the chemistries can have an impact on the choice for specific chemistry. For example, the lighter packaging of LiPo batteries makes them the cell of choice for most commercial electronic devices [11]. High-rate LFP chemistry is used in only a small number of drones for shorter missions, due to its good high-current discharge abilities. NMC technology is utilized for longer missions where energy demand (specific energy) dominates the selection process.
The pressure tolerance of the battery is an additional consideration that guides the Lithium-ion chemistry choice for underwater robots [35]. Overall, there is no clear preference in the present battery selection for underwater robots. The present Lithium-ion technologies are replacing the usually used lead-acid and Ni-MH batteries providing more energy and lifespan [36]. LiPo batteries are considered a suitable choice since their packaging can be designed to resist pressure in deep water. NMC, LTO and NCA can also be good alternatives for underwater robots due to their lifespan.
In commercial wheeled and tracked robots, a variety of Lithium-ion batteries are used, including LFP and LiPo batteries. LFP technology indeed ranks first in the battery selection for this category of robots, which are very balanced in terms of requirements. LiPo batteries – the third choice after LTO – can bring light packaging and flexibility as additional advantages.
For legged robots, LTO and LiPo perform similarly as LFP. The limited commercial availability of LTO batteries makes LFP and LiPo technologies, which dominate the market share, the preferred choice. LiPo batteries are more common as the polymer electrolytes endow them with the ability to support the high current pulses typical of legged robots.
Specifics about the battery chemistry of wearable robots are rarely reported. LiPo technology is an excellent choice for these robots, as it fits most of the requirements for current variation, specific power and safety. LiPo battery packs have indeed been used in several exoskeletons, although newer exoskeletons increasingly rely on Lithium-ion chemistries [41,42]. LFP and LTO can be considered the most suitable technologies.
Due to their excellent properties in terms of current variation and lifespan, LFP and LTO technologies could be considered for space robots. However, due to high self-discharge (important for long missions) and lack of commercial availability, they are not commonly used. NCA is found to be the key technology of interest in NASA’s future consideration as they are closely studying various market available NCA batteries [44]. It is also the battery chemistry that was selected for the Mars Rover. In recent missions, robots have typically been equipped with NCO technology batteries, which are similar in terms of chemistry to NCA but lack the presence of Aluminum [43]. LCO is often used in NASA missions. The possible reasons for this may include customized battery cell, maturity of the technology, optimized anode resisting lithium-plating at low temperature, better stability etc. [45]. For satellite missions, both LiPo and Lithium-ion cells are being considered depending on the features of interest [46,47].
4. Additional Technologies for Improved Performance
4.1. Battery Management Systems
4.2. Thermal Management Systems
4.3. Recharging and Battery Swapping
4.4. Hybrid Architectures
4.5. Packaging
This entry is adapted from the peer-reviewed paper 10.3390/en16134904
References
- Kashiri, N.; Abate, A.; Abram, S.J.; Albu-schaffer, A.; Clary, P.J.; Daley, M.; Faraji, S.; Furnemont, R.; Garabini, M.; Geyer, H.; et al. An Overview on Principles for Energy Efficient Robot Locomotion. Front. Robot. AI 2018, 5, 129.
- Verstraten, T.; Beckerle, P.; Furnémont, R.; Mathijssen, G. Series and Parallel Elastic Actuation: Impact of natural dynamics on power and energy consumption. Mech. Mach. Theory 2016, 102, 232–246.
- Buehler, M.; Playter, R.; Raibert, M. Robots Step Outside. In Proceedings of the International Symposium Adaptive Motion of Animals and Machines (AMAM), Cambridge, CA, USA, 21–25 June 2015; pp. 1–4.
- Bleex, E.E.; Zoss, A.B.; Kazerooni, H.; Chu, A. Biomechanical Design of the Berkeley Lower. IEEE/ASME Trans. Mechatron. 2006, 11, 128–138.
- Madden, J.D. Mobile Robots: Motor Challenges and Materials Solutions. Science 2007, 318, 1094–1098.
- Logan, D.G.; Pentzer, J.; Brennan, S.N.; Reichard, K. Comparing batteries to generators as power sources for use with mobile robotics. J. Power Sources 2012, 212, 130–138.
- Council, N.R. Meeting the Energy Needs of Future Warriors; The National Academies Press: Washington, DC, USA, 2004.
- Delvasto, P. Comparison of Different Battery Types for Electric Vehicles Comparison of Different Battery Types for Electric Vehicles. IOP Conf. Ser. Mater. Sci. Eng. 2017, 252, 012058.
- Scrosati, B.; Garche, J.; Tillmetz, W. Advances in Battery Technologies for Electric Vehicles; Woodhead Publishing: Sawston, UK, 2015.
- Miao, Y.; Hynan, P.; Von Jouanne, A.; Yokochi, A. Current Li-Ion Battery Technologies in Electric Vehicles and Opportunities for Advancements. Energeies 2019, 12, 1074.
- Liang, Y.; Hong, C.Z.; Yuan, Y. A review of rechargeable batteries for portable electronic devices. InfoMat 2019, 1, 6–32.
- Whittingham, M.S. History, evolution, and future status of energy storage. Proc. IEEE 2012, 100, 1518–1534.
- Whittingham, M.S. Lithium batteries and cathode materials. Chem. Rev. 2004, 104, 4271–4301.
- Chen, J. Recent progress in advanced materials for lithium ion batteries. Materials 2013, 6, 156–183.
- Chen, J.; Whittingham, M.S. Hydrothermal synthesis of lithium iron phosphate. Electrochem. Commun. 2006, 8, 855–858.
- Scrosati, B.; Croce, F.; Panero, S. Progress in lithium polymer battery R & D. J. Power Sources 2001, 100, 93–100.
- Van Mierlo, J.; Berecibar, M.; El Baghdadi, M.; De Cauwer, C.; Messagie, M.; Coosemans, T.; Hegazy, O. Beyond the State of the Art of Electric Vehicles: A Fact-Based Paper of the Current and Prospective Electric Vehicle Technologies. World Electr. Veh. J. 2021, 12, 20.
- EMIRI Technology Roadmap; September. 2019. Available online: https://emiri.eu/project/emiri-technology-roadmap/ (accessed on 22 November 2021).
- Dominko, R.; Fichtner, M.; Otuszewski, T.; Punckt, C.; Tarascon, J.; Vegge, T.; Dominko, R.; Edström, K.; Fichtner, M.; Punckt, C. BATTERY 2030+ Roadmap: Inventing the Sustainable Batteries of the Future. 2020. Available online: https://battery2030.eu/wp-content/uploads/2022/07/BATTERY-2030-Roadmap_Revision_FINAL.pdf (accessed on 22 November 2021).
- From Wikimedia Commons, the free Media Repository , (n.d.). Available online: https://commons.wikimedia.org/wiki/Robot (accessed on 13 June 2023).
- From Wikimedia Commons, the Free Media Repository , (n.d.). Available online: https://commons.wikimedia.org/wiki/Category:Unmanned_aerial_vehicles (accessed on 13 June 2023).
- “AUV” by MARUM—Zentrum für Marine Umweltwissenschaften under License CC-BY 4.0, (n.d.). Available online: https://commons.wikimedia.org/wiki/File:MARUM-AUV-en-03-HiRes.jpg (accessed on 13 June 2023).
- “N216D074” by Steve Dock under License OGL v1.0, (n.d.). Available online: https://upload.wikimedia.org/wikipedia/commons/8/88/Dragon_Runner_Bomb_Disposal_Robot_MOD_45159060.jpg (accessed on 13 June 2023).
- “Sechsbeiniger Laufroboter aus dem FZI Forschungszentrum Informatik, Karlsruhe“ by FZI Forschungszentrum Informatik Karlsruhe—Abteilung IDS under License, (n.d.). Available online: https://commons.wikimedia.org/wiki/File:Lauron4c_2009_FZI_Karlsruhe.jpg (accessed on 13 June 2023).
- Poliero, T.; Lazzaroni, M.; Toxiri, S.; Di Natali, C.; Caldwell, D.G.; Ortiz, J. Applicability of an Active Back-Support Exoskeleton to Carrying Activities. Front. Robot. AI 2020, 7, 579963.
- Gao, Y.; Chien, S. Review on space robotics: Toward top-level science through space exploration. Sci. Robot. 2017, 2, eaan5074.
- Antonelli, G. Underwater Robots; Springer: Cham, Switzerland, 2014.
- Pandey, A.K.; Gelin, R. A Mass-Produced Sociable Humanoid Robot: Pepper: The First Machine of Its Kind. IEEE Robot. Autom. Mag. 2018, 25, 40–48.
- Seok, S.; Wang, A.; Yee, M.; Chuah, M.; Hyun, D.J.; Lee, J.; Otten, D.M.; Lang, J.H.; Kim, S. Design Principles for Energy-Efficient Legged Locomotion and Implementation on the MIT Cheetah Robot. IEEE/ASME Trans. Mechatron. 2015, 20, 1117–1129.
- Hutter, M.; Gehring, C.; Jud, D.; Lauber, A.; Bellicoso, C.D.; Tsounis, V.; Hwangbo, J.; Bodie, K.; Fankhauser, P.; Bloesch, M.; et al. ANYmal—A Highly Mobile and Dynamic Quadrupedal Robot. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots And Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 38–44.
- Todd, D.J. Walking Machines: An Introduction to Legged Robots; Springer Science & Business Media: Berlin, Germany, 2013.
- Young, A.J.; Ferris, D.P. State of the Art and Future Directions for Lower Limb Robotic Exoskeletons. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 171–182.
- Menale, C.; Annibale, F.D.; Mazzarotta, B.; Bubbico, R. Thermal management of lithium-ion batteries: An experimental investigation. Energy 2019, 182, 57–71.
- Samanta, A. A Survey of Wireless Battery Management System: Topology, Emerging Trends, and Challenges. Electronics 2021, 10, 2193.
- Wei, Z.; Zhao, J.; He, H.; Ding, G.; Cui, H.; Liu, L. Future smart battery and management: Advanced sensing from external to embedded multi-dimensional measurement. J. Power Sources 2021, 489, 229462.
- Zhu, Y.; Chen, J.; Mao, L.; Zhao, J. A noise-immune model identification method for lithium-ion battery using two-swarm cooperative particle swarm optimization algorithm based on adaptive dynamic sliding window. Int. J. Energy Res. 2022, 46, 3512–3528.
- Xia, F.; Wang, K.; Chen, J. State of health and remaining useful life prediction of lithium-ion batteries based on a disturbance-free incremental capacity and differential voltage analysis method. J. Energy Storage 2023, 64, 107161.
- Han, X.; Wang, Z.; Wei, Z. A novel approach for health management online-monitoring of lithium-ion batteries based on model-data fusion. Appl. Energy 2021, 302, 117511.
- Xia, F.; Wang, K.; Chen, J. State-of-Health Prediction for Lithium-Ion Batteries Based on Complete Ensemble Empirical Mode Decomposition with Adaptive Noise-Gate Recurrent Unit Fusion Model. Energy Technol. 2022, 10, 2100767.
- Hosen, M.S.; Pirooz, A.; Kalogiannis, T.; He, J.; Van Mierlo, J.; Berecibar, M. A Strategic Pathway from Cell to Pack-Level Battery Lifetime Model Development. Appl. Sci. 2022, 12, 4781.
- Sattayasoonthorn, P.; Suthakorn, J. Battery Management for Rescue Robot Operation. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 1227–1232.
- Wang, B.; Sun, Q.; Zhang, D.; Gong, Y. Design of Lithium Battery Management System for Underwater Robot. In Proceedings of the International Conference on Computer Engineering and Networks; Springer: Berlin/Heidelberg, Germany, 2020; pp. 989–995.
- Akbarzadeh, M.; Kalogiannis, T.; Jaguemont, J.; He, J.; Jin, L. Thermal modeling of a high-energy prismatic lithium-ion battery cell and module based on a new thermal characterization methodology. J. Energy Storage 2020, 32, 101707.
- Karimi, D.; Behi, H.; Hosen, S.; Jaguemont, J.; Berecibar, M. A compact and optimized liquid-cooled thermal management system for high power lithium-ion capacitors. Appl. Therm. Eng. 2021, 185, 116449.
- Behi, H.; Karimi, D.; Behi, M.; Jaguemont, J. Thermal management analysis using heat pipe in the high current discharging of lithium-ion battery in electric vehicles. J. Energy Storage 2020, 32, 101893.
- Sevinchan, E.; Dincer, I.; Lang, H. A review on thermal management methods for robots. Appl. Therm. Eng. 2018, 140, 799–813.
- Zhang, C.; Jiang, J.; Gao, Y.; Zhang, W.; Liu, Q.; Hu, X. Charging optimization in lithium-ion batteries based on temperature rise and charge time. Appl. Energy 2017, 194, 569–577.
- Abdel-monem, M.; Trad, K.; Omar, N.; Hegazy, O.; Van Den Bossche, P.; Mierlo, J. Van In fl uence analysis of static and dynamic fast-charging current pro fi les on ageing performance of commercial lithium-ion batteries. Energy 2020, 120, 179–191.
- Suarez, C.; Martinez, W. Fast and Ultra-Fast Charging for Battery Electric Vehicles—A Review. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 569–575.
- Vehicles, P.H.; Matthias, R.; Walzel, B.; Hirz, M.; Brunner, H. 3D Vision Guided Robotic Charging Station for Electric and Plug-in Hybrid Vehicles. OAGM ARW Jt. Work. 2017 Vision Autom. Robot. 2017, arXiv:1703.05381.
- Kong, P.; Member, S. Autonomous Robot-Like Mobile Chargers for Electric Vehicles at Public Parking Facilities. IEEE Trans. Smart Grid 2019, 10, 5952–5963.
- Phamduy, P.; Cheong, J.; Porfiri, M.; Member, S. An Autonomous Charging System for a Robotic Fish. IEEE/ASME Trans. Mechatron. 2016, 21, 2953–2963.
- Mcewen, R.S.; Hobson, B.W.; Mcbride, L.; Bellingham, J.G. Docking Control System for a 54-cm-Diameter (21-in) AUV. IEEE J. Ocean. Eng. 2008, 33, 550–562.
- Bradley, A.M.; Feezor, M.D.; Singh, H.; Sorrell, F.Y. Power Systems for Autonomous Underwater Vehicles. IEEE J. Ocean. Eng. 2001, 26, 526–538.
- Teeneti, C.R.; Member, S.; Truscott, T.T.; Beal, D.N. Review of Wireless Charging Systems for Autonomous Underwater Vehicles. IEEE J. Ocean. Eng. 2021, 46, 68–87.
- Hu, A.P.; Liu, C.; Li, H.L. A Novel Contactiess Battery Charging System for Soccer Playing Robot. In Proceedings of the 15th International Conference on Mechatronics and Machine Vision in Practice (M2VIP08), Auckland, New Zealand, 2–4 December 2008; pp. 2–4.
- Mostafa, T.M.; Muharam, A.; Hattori, R. Wireless Battery Charging System for Drones via Capacitive Power Transfer. In Proceedings of the 2017 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), Chongqing, China, 20–22 May 2017; pp. 1–6.
- Arvin, F.; Watson, S.; Emre, A.; Jose, T. Perpetual Robot Swarm: Long-Term Autonomy of Mobile Robots Using On-the-fly Inductive Charging. J. Intell. Robot. Syst. 2018, 92, 395–412.
- Shidujaman, M.; Samani, H.; Raayatpanah, M.A.; Mi, H. Towards Deploying the Wireless Charging Robots in Smart Environments. In Proceedings of the 2018 International Conference on System Science and Engineering (ICSSE), New Taipei, Taiwan, 28–30 June 2018; pp. 1–6.
- Jang, Y.J. Survey of the operation and system study on wireless charging electric vehicle systems. Transp. Res. Part C 2018, 95, 844–866.
- Marinescu, A.; Rosu, G.; Mandache, L. Achievements and Perspectives in Contactless Power Transmission. In Proceedings of the 2018 International Conference and Exposition on Electrical And Power Engineering (EPE), Iasi, Romania, 18–19 October 2018; pp. 638–645.
- Seriani, S.; Medvet, E.; Carrato, S.; Gallina, P. Powered Floor Systems. IEEE/ASME Trans. Mechatron. 2020, 25, 1045–1055.
- Sanguino, D.J.M.; Gonz, J.E. Smart Host Microcontroller for Optimal Battery Charging in a Solar-Powered Robotic Vehicle. IEEE/ASME Trans. Mechatron. 2013, 18, 1039–1049.
- Lu, M.; Bagheri, M.; James, A.P.; Member, S. Wireless Charging Techniques for UAVs: A Review, Reconceptualization, and Extension. IEEE Access 2020, 6, 29865–29884.
- Ure, N.K.; Chowdhary, G.; Toksoz, T.; How, J.P.; Member, S.; Vavrina, M.A.; Vian, J. An Automated Battery Management System to Enable Persistent Missions With Multiple Aerial Vehicles. IEEE/ASME Trans. Mechatron. 2015, 20, 275–286.
- Reiling, M.; Mirhassani, S.; Jager, J.; Mimmo, N.; Callegati, F.; Marconi, L.; Carloni, R.; Stramigioli, S. Autonomous Battery Exchange of UAVs with a Mobile Ground Base. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018.
- Song, Z.; Li, J.; Hou, J.; Hofmann, H.; Ouyang, M.; Du, J. The battery-supercapacitor hybrid energy storage system in electric vehicle applications: A case study. Energy 2018, 154, 433–441.
- Babu, T.S.; Vasudevan, K.R.; Ramachandaramurthy, V.K.; Sani, S.B.; Chemud, S.; Lajim, R.M. A Comprehensive Review of Hybrid Energy Storage Systems: Converter Topologies, Control Strategies and Future Prospects. IEEE Access 2020, 8, 148702–148721.
- Hemmati, R.; Saboori, H. Emergence of hybrid energy storage systems in renewable energy and transport applications—A review. Renew. Sustain. Energy Rev. 2016, 65, 11–23.
- Kim, T.; Kwak, S.; Park, J. Hybrid System Control for Robot Motors Based on a Reduced Component, Multi-Voltage Power Supply System. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 3582–3586.
- Hajiaghasi, S.; Salemnia, A.; Hamzeh, M. Hybrid energy storage system for microgrids applications: A review. J. Energy Storage 2019, 21, 543–570.
- Wang, Y.; Wang, L.; Li, M.; Chen, Z. A review of key issues for control and management in battery and ultra-capacitor hybrid energy storage systems. eTransportation 2020, 4, 100064.
- Gold, L.; Bach, T.; Virsik, W.; Schmitt, A.; Müller, J.; Staab, T.E.M.; Sextl, G. Probing lithium-ion batteries ’ state-of-charge using ultrasonic transmission e Concept and laboratory testing. J. Power Sources 2017, 343, 536–544.
- Maiser, E. Battery Packaging—Technology Review. In Proceedings of the AIP Conference Proceedings; American Institute of Physics: College Park, MA, USA, 2014; Volume 218, pp. 204–218.
- Lee, P.; Park, S.; Cho, I.; Kim, J. Vibration-based degradation effect in rechargeable lithium ion batteries having different cathode materials for railway vehicle application. Eng. Fail. Anal. 2021, 124, 105334.
- Brand, M.J.; Schuster, S.F.; Bach, T.; Fleder, E.; Stelz, M.; Müller, J.; Sextl, G.; Jossen, A.; Gl, S. Effects of vibrations and shocks on lithium-ion cells. J. Power Sources 2015, 288, 62–69.
- Zhang, L.; Ning, Z.; Peng, H.; Mu, Z.; Sun, C. Effects of Vibration on the Electrical Performance of Lithium-Ion Cells Based on Mathematical Statistics. Appl. Sci. 2017, 7, 802.
- Arora, S.; Shen, W.; Kapoor, A. Review of mechanical design and strategic placement technique of a robust battery pack for electric vehicles. Renew. Sustain. Energy Rev. 2016, 60, 1319–1331.
- Kajita, S.; Cisneros, R.; Benallegue, M.; Sakaguchi, T.; Nakaoka, S.; Morisawa, M.; Kaneko, K.; Kanehiro, F. Impact Acceleration of Falling Humanoid Robot with an Airbag. In Proceedings of the 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), Cancun, Mexico, 15–17 November 2016.
- Negrello, F.; Garabini, M.; Catalano, M.G.; Malzahn, J.; Caldwell, D.G.; Bicchi, A.; Tsagarakis, N.G. A Modular Compliant Actuator for Emerging High Performance and Fall-Resilient Humanoids. In Proceedings of the 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), Seoul, Republic of Korea, 3–5 November 2015; pp. 414–420.
- Goswami, A.; Umashankar, S.Y.; Kangkang, S.L.; Shivaram, Y. Direction-changing fall control of humanoid robots: Theory and experiments. Auton. Robot. 2014, 36, 199–223.
- Merckaert, K.; Convens, B.; Wu, C.; Roncone, A.; Nicotra, M.M.; Vanderborght, B. Robotics and Computer-Integrated Manufacturing Real-time motion control of robotic manipulators for safe human—Robot coexistence. Robot. Comput. Integr. Manuf. 2022, 73, 102223.