Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
The observation and detection of the subsea environment urgently require large-scale and long-term observation platforms. The design and development of subsea autonomous underwater vehicles (AUVs) involve three key points: the subsea-adapted main body structure, agile motion performance that adapts to complex underwater environments, and underwater acoustic communication and positioning technology.
- AUV
- seabed
- marine observation and detection
1. Overview
The observation and detection of the subsea environment is an important way of exploring and studying the ocean, which is also crucial for building maritime power. The observation and detection of the subsea environment are also important for marine scientific research, resource detection, global climate change research, marine archaeology, and military target detection.
At present, the technical means for seabed observation and exploration are relatively limited and mainly include the deployment of submarine buoys, unmanned/manned underwater vehicles, and seabed observation networks. The submarine observation network utilizes cables (usually optoelectronic composite cables) to connect observation stations (i.e., Subsea Stations) on the seabed into a network, transmitting electricity as well as observation data. With the seabed observation network, we can conduct long-term, uninterrupted, and real-time multi-parameter monitoring of specific water bodies [1]. However, due to the fixed platforms of the seabed observation network and submarine buoys, the observation and detection range is rather limited, and as a result, underwater vehicles are still important platforms for the observation and detection of seabed movement.
However, the terrain and topography of the seabed are rugged and varied, with features such as seamounts, hills, ridges, and trenches. There exist significant practical limitations for traditional underwater vehicles when operating in complex terrains. The Deep Submergence Vehicle (DSV) can carry scientists to the seabed for direct observation, but its range of activity is extremely limited. The unmanned remotely operated vehicle (ROV) is connected to the deck control station through an umbilical cable, which restricts its mobility in limited space, thus the ROV cannot conduct large-scale observation and detection. The motion range of autonomous underwater vehicles (AUVs) or underwater gliders (AUGs) is not limited by umbilical cables, although transversal propellers are usually required to increase their maneuverability when operating near the seabed. Therefore, existing submersible platforms cannot provide sufficient support for subsea observation and exploration missions.
With the development of ocean technology, new forms of underwater vehicles gradually come into our vision, including underwater crawling machines that can directly move on the seabed and have been applied to long-term observation [2][3], deep-sea sampling [4], and other scenarios. Biomimetic submersibles have more flexible driving methods and stronger environmental adaptability by imitating the forms of marine organisms such as fish [5][6][7], manta rays [8][9][10], octopus [11][12], and crabs [13].
In recent years, with the expansion of the scope and period of underwater observation and exploration, the demand for submersible platforms has extended from fixed-point and short-term observations to large-scale and long-term three-dimensional collaborative observations. However, the existing traditional and fixed observation methods are limited by their respective technical characteristics and cannot collaborate efficiently, making it difficult to achieve effective observation and detection of the seabed environment. At present, there are a number of AUVs capable of performing multiple tasks in the seabed environment; nevertheless, benthic underwater vehicles are preferred to have long-term residential capability and high agility (Figure 1). Such unmanned autonomous mobile platforms are known as “subsea AUVs,” or subsea resident AUVs (RAUVs) [14] and subsea robots [15].
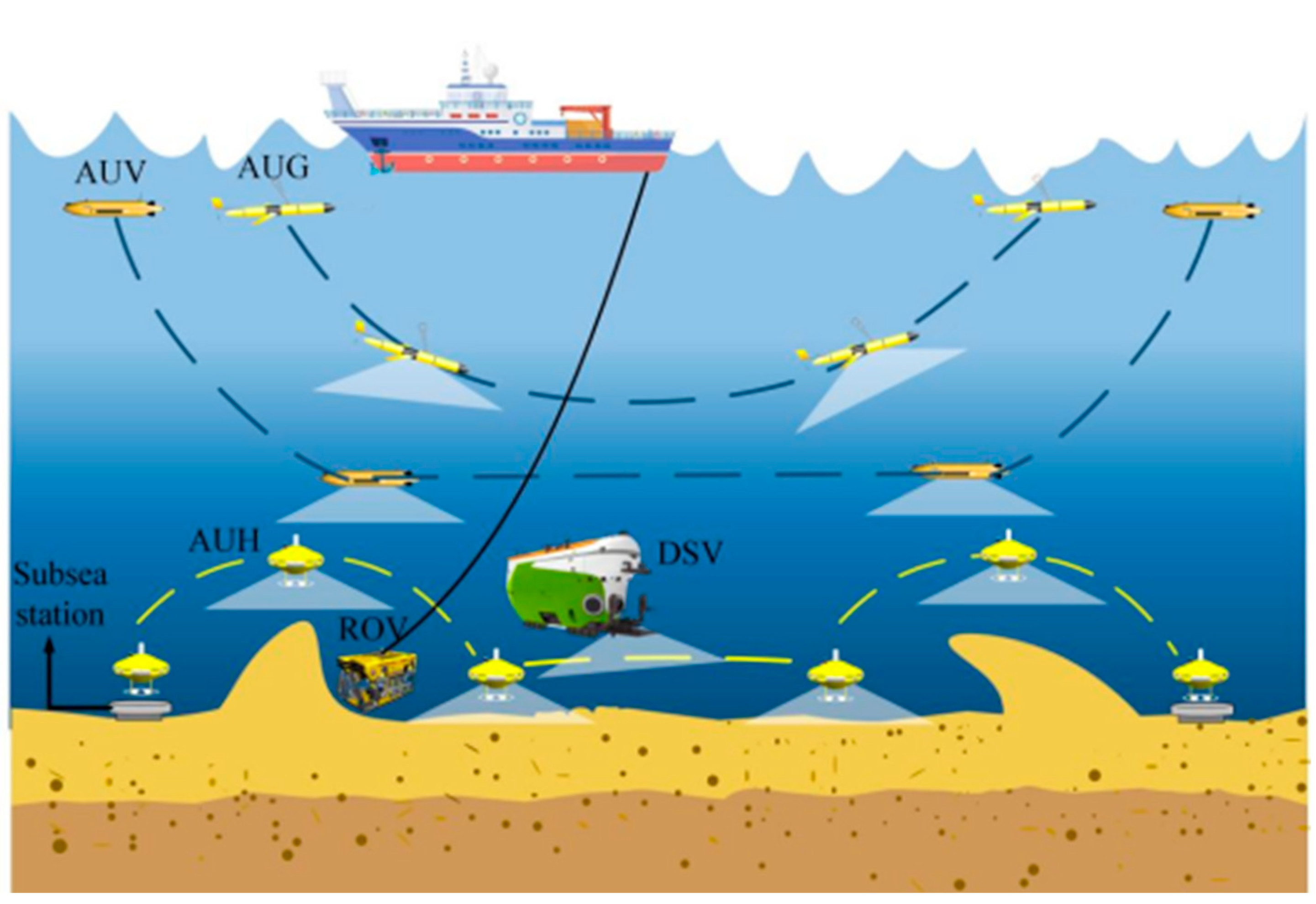
Figure 1. Operating range of various underwater robots in water bodies.
Since the world’s first AUV was developed by the University of Washington in the 1950s, the development of AUV has been ongoing for more than 60 years. With the development of computer technology and the increasing maturity of electronic technology, in the late 1990s, AUV entered a rapid development stage, and a number of influential AUVs were successfully developed and applied, including ABE in the United States, Autosub in the United Kingdom, and Theseus in Canada. AUV technology has come into a new development era since the beginning of the 21st century, with the emergence of an increasing number of commercialized AUVs such as Hydroid’s Bluefin series in the United States, Kongsberg’s REMUS and HUGIN series in Norway, and Teledyne’s Gavia series in the United States. AUV has entered the stage of practical application.
Traditional torpedo-shaped AUVs are mostly underactuated systems with strong nonlinearity and coupling in a control system. When AUV is applied to the seabed environment, considering the complexity of seabed fluid action and model parameter uncertainty, controlling the AUV is difficult. With the development of underwater technology and the expansion of application scenarios, AUV has emerged in various structural forms.
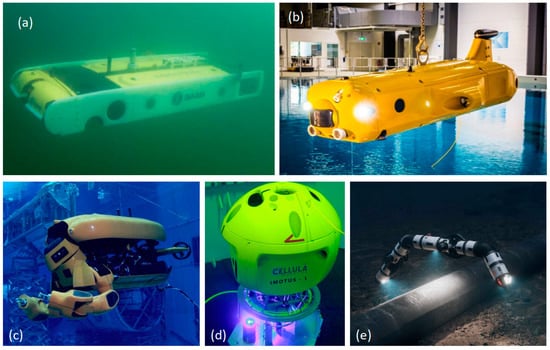
Saab Seaeye’s Sabertooth AUV has a rectangular body structure (Figure 2a) and is neutrally buoyant, balancing endurance and maneuverability. Sabertooth AUV has a working depth of 2400 m and can switch between AUV and ROV operating modes. Flatfish AUV also has bottom-dwelling capabilities but has a different shape [16] (Figure 2b). Houston Mechatronics Inc.’s Aquanaut can deform to adapt to different operation scenarios. When sailing, it adopts a rectangular shape to effectively reduce motion resistance. When it reaches its destination, it can open its mechanical arm to perform operations (Figure 2c). Cellula Robotics Imotus is a low-speed, hoverable AUV used for small-scale continuous observation (Figure 2d). Eelume has a slender body structure that can be used for detection in narrow pipe spaces [17] (Figure 2e).
Based on previous research, this paper intends to review and discuss the correlated technologies required more specifically for subsea AUVs, give one example of the subsea AUVs, and subsequently introduce the specific design considerations for the AUH.
2. The Mobility and Agility of Subsea AUV
Traditionally, the study of underwater vehicles mainly focuses on rapidity and endurance, especially when it comes to the maximum speed of AUV; however, there are few studies on its agility. Due to the complexity of the seabed environment, the maneuverability and agility of underwater vehicles are important indicators for the performance evaluation of subsea AUVs.
The agility of a submersible refers to its effectiveness and speed when it comes to changing its speed, direction, and location. The concept of agility also includes the concept of maneuverability, which refers to the ability to change speed, direction, and location while maintaining stability (Figure 3), as detailed below:
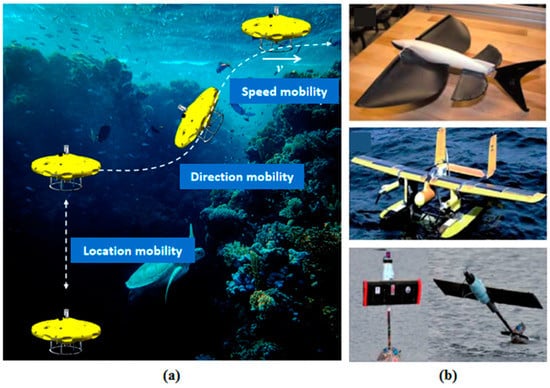
Figure 3. Mobility of the underwater vehicle: (a) illustration of speed, direction, and location mobility; (b) underwater vehicles with location mobility.
- (1)
-
Speed mobility: On the one hand, this refers to faster and more stable seabed navigation capabilities, and on the other hand, it refers to the ability to work at extremely low speeds (including hovering, i.e., zero speed).
- (2)
-
Direction mobility: This refers to the ability to turn and change pitch, yaw, and roll in three degrees of freedom, i.e., attitude control. Mobile submersibles need to have both instantaneous angular velocity and large-angle stability. Due to the need to quickly adapt to the complexity of seabed topography, direction mobility is particularly important for subsea AUVs.
- (3)
-
Location mobility: This part is less considered during submersible design. It refers to the ability of the vehicle to move through different environments—air, land, water surface, water body, and seabed. For example, an amphibious aircraft needs to have the ability to fly in the air and dive underwater. For subsea AUVs, it is mainly about having stable operation capabilities, from landing on water bodies, diving to the seabed, and taking off from the seabed.
Agility refers to how quickly the vehicle changes its speed, direction, and location. Speed agility is the ability of the vehicle to accelerate or decelerate. Direction agility involves angular velocity and other quantities such as the turning radius of a submersible. Location agility refers to the time it takes for the vehicle to change locations. Agility provides necessary conditions for expanding the navigation performance and operational capabilities of submersibles and is a key focus of subsea AUV technology development.
In recent years, as the application scenarios have expanded, researchers have carried out preliminary work on the analysis and improvement of the agility of underwater vehicles. The design goal of traditional vehicles is to pursue increased mobility, that is, faster speed and higher propulsion efficiency, while there is less research on mobility in confined spaces and agility in complex seabed environments. In terms of directional agility, Kumar et al. [23] designed a split-shell submersible in which the agility of the vehicle is increased by optimizing the steering mode and lateral force and studied its impact on the control system of the vehicle. Gao et al. [24] designed a hybrid propulsion underwater vehicle with propellers and biomimetic fins. The hybrid drive mode makes the vehicle both fast and agile, making it more adaptable to complex marine environments. Inspired by amphibious/terrestrial animals, underwater vehicles with location agility have been developed, including mechanical turtles [25] and four-finned biomimetic submersibles [26], all of which have the ability to change between land–water–seabed and other multi-sites.
This entry is adapted from the peer-reviewed paper 10.3390/jmse11061119
References
- Chen, Y.; Yang, C.; Tao, C. Seabed Observation System; Ocean Press: Beijing, China, 2006. (In Chinese)
- Doya, C.; Chatzievangelou, D.; Bahamon, N.; Purser, A.; De Leo, F.C.; Juniper, S.K.; Thomsen, L.; Aguzzi, J. Seasonal monitoring of deep-sea megabenthos in Barkley Canyon cold seep by internet operated vehicle (IOV). PLoS ONE 2017, 12, e0176917.
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 2016, 1, eaah3690.
- Yoshida, H.; Aoki, T.; Osawa, H.; Ishibashi, S.; Watanabe, Y.; Tahara, J.; Miyazaki, T.; Itoh, K. A deepest depth ROV for sediment sampling and its sea trial result. In Proceedings of the Symposium on Underwater Technology and Workshop on Scientific Use of Submarine Cables and Related Technologies, Tokyo, Japan, 17–20 April 2007; pp. 28–33.
- Katzschmann, R.; Marchese, A.; Rus, D. Hydraulic autonomous soft robotic fish for 3D swimming. In Proceedings of the Experimental Robotics: The 14th International Symposium on Experimental Robotics, Marrakech and Essaouira, Morocco, 15–18 June 2015; pp. 405–420.
- Marchese, A.; Onal, C.; Rus, D. Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators. Soft Robot. 2014, 1, 75–87.
- Marras, S.; Porfiri, M. Fish and robots swimming together: Attraction towards the robot demands biomimetic locomotion. J. R. Soc. Interface 2012, 9, 1856–1868.
- Cloitre, A.; Arensen, B.; Patrikalakis, N.; Youcef-Toumi, K.; Alvarado, P.V.Y. Propulsive performance of an underwater soft biomimetic batoid robot. In Proceedings of the Twenty-Fourth International Ocean and Polar Engineering Conference, Busan, Korea, 15–20 June 2014; Volume 19, pp. 1712–1717.
- Li, T.; Li, G.; Liang, Y.; Cheng, T.; Dai, J.; Yang, X.; Liu, B.; Zeng, Z.; Huang, Z.; Luo, Y.; et al. Fast-moving soft electronic fish. Sci. Adv. 2017, 3, e1602045.
- Suzumori, K.; Endo, S.; Kanda, T.; Kato, N.; Suzuki, H. A bending pneumatic rubber actuator realizing soft-bodied manta swimming robot. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 4975–4980.
- Calisti, M.; Giorelli, M.; Levy, G.; Mazzolai, B.; Hochner, B.; Laschi, C.; Dario, P. An octopus-bioinspired solution to movement and manipulation for soft robots. Bioinspir. Biomim. 2011, 6, 036002.
- Purser, A.; Thomsen, L.; Barnes, C.; Best, M.; Chapman, R.; Hofbauer, M.; Menzel, M.; Wagner, H. Temporal and spatial benthic data collection via an internet operated Deep Sea Crawler. Methods Oceanogr. 2013, 5, 1–18.
- Picardi, G.; Chellapurath, M.; Iacoponi, S.; Stefanni, S.; Laschi, C.; Calisti, M. Bioinspired underwater legged robot for seabed exploration with low environmental disturbance. Sci. Robot. 2020, 5, eaaz1012.
- Song, Z.; Marburg, A.; Manalang, D. Resident Subsea Robotic Systems: A Review. Mar. Technol. Soc. J. 2020, 54, 21–31.
- Singh, H.; Can, A.; Eustice, R.; Lerner, S.; McPhee, N.; Roman, C. Seabed AUV offers new platform for High-Resolution Imaging. EOS 2004, 85, 292–295.
- Albiez, J.; Joyeux, S.; Gaudig, C.; Hilljegerdes, J.; Kroffke, S.; School, C.; Arnold, S.; Mimoso, G.; Alcantara, P.; Saback, R.; et al. FlatFish—A compact subsea-resident inspection AUV. In Proceedings of the OCEANS 2015, Washington, DC, USA, 19–22 October 2015; p. 7404442.
- Borlaug, I.; Pettersen, K.; Gravdahl, J. Combined kinematic and dynamic control of vehicle-manipulator systems. Mechatronics 2020, 69, 102380.
- Johansson, B.; Siesjö, J.; Furuholmen, M. Seaeye sabertooth a hybrid auv/rov offshore system. In Proceedings of the OCEANS 2010 MTS/IEEE SEATTLE, Seattle, WA, USA, 20–23 September 2010; IEEE: New York, NY, USA, 2010; pp. 1–3.
- Manalang, D.; Delaney, J.; Marburg, A.; Nawaz, A. Resident auv workshop 2018: Applications and a path forward. In Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 6–9 November 2018; IEEE: New York, NY, USA, 2018; pp. 1–6.
- Manley, J.E.; Halpin, S.; Radford, N.; Ondler, M. Aquanaut: A new tool for subsea inspection and intervention. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; IEEE: New York, NY, USA, 2018; pp. 1–4.
- Soylu, S.; Hampton, P.; Crees, T.; Woodroffe, A.; Jackson, E. Sonar-based slam navigation in flooded confined spaces with the imotus-1 hovering auv. In Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 6–9 November 2018; IEEE: New York, NY, USA, 2018; pp. 1–6.
- Kelasidi, E.; Moe, S.; Pettersen, K.Y.; Kohl, A.M.; Liljebäck, P.; Gravdahl, J.T. Path following, obstacle detection and obstacle avoidance for thrusted underwater snake robots. Front. Robot. AI 2019, 6, 57.
- Kumar, V.; Rajagopal, P. Optimising the turning performance of serial split-hull underwater vehicles. Ocean Eng. 2022, 261, 112099.
- Gao, D.; Wang, T.; Qin, F.; Zhang, S.; Jing, J.; Yang, J. Design, fabrication, and testing of a maneuverable underwater vehicle with a hybrid propulsor. Biomim. Intell. Robot. 2022, 2, 100072.
- Low, K.; Willy, A. Biomimetic motion planning of an undulating robotic fish fin. J. Vib. Control 2006, 12, 1337–1359.
- Hu, T.; Wang, G.; Shen, L.; Li, F. A novel conceptual fish-like robot inspired by Rhinecanthus aculeatus. In Proceedings of the 9th International Conference on Control, Automation, Robotics and Vision, Singapore, 5–8 December 2006; pp. 1–5.
This entry is offline, you can click here to edit this entry!