Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is an old version of this entry, which may differ significantly from the current revision.
Drowsiness-related car accidents continue to have a significant effect on road safety. Many of these accidents can be eliminated by alerting the drivers once they start feeling drowsy. Image-based systems are the most commonly used techniques for detecting driver drowsiness. Facial parameters such as the eyes, mouth, and head can be used to identify many visual behaviors that fatigued people exhibit.
- driver drowsiness detection
- visual features
1. Introduction
Drowsiness is a major concern with respect to road safety. Drivers’ unconsciousness due to microsleep can frequently lead to destructive accidents. Falling asleep at the wheel is usually related to lack of sleep, exhaustion, or mental health problems. In the UAE, the ministry of interior recorded 2931 car crashes in 2020. The number increased in 2021 to 3488 records. The majority of these traffic accidents were caused by distracted driving due to drowsiness, sudden swerving, or failure to maintain a safe distance between vehicles [1]. In this situation, it is crucial to exploit new technologies to plan and design systems that can track drivers and estimate their level of attention while driving. As multiple countries are concerned regarding this issue, researchers worldwide worked on building Driver Drowsiness Detection (DDD) systems that are capable of detecting drivers’ drowsiness signs in the early stages.
According to the literature, drowsiness detection systems can be grouped into three categories based on the measures that are used to detect the drowsiness signs [2][3][4][5]: biological-based, vehicle-based, and image-based systems. In the first category, biological-based measures rely on monitoring the body’s physiological signals including, ElectroEncephaloGraphy (EEG), ElectroCardioGraphy (ECG), ElectroMyoGraphy (EMG), Electro-OculoGraphy (EOG) signals, and blood pressure [6][7][8][9]. In this type of system, drowsiness is determined by detecting the signal’s deviation from the standard state’s characteristics and analyzing if the new signal indicates drowsiness. In the second category, vehicle-based measures depend on monitoring variations in the car’s movement patterns through different sensors’ installed to measure various vehicle and street parameters. To infer the drowsiness level, vehicle-based systems analyze the changes or abnormal behavior of the car, including, for example, the steering wheel angle, speed, or deviation from the lane [10][11]. The third category is the image-based measures which depend mainly on the drowsiness signs that appear on the driver’s face and head. These systems detect drowsiness by monitoring the drivers’ head movements and facial parameters such as the eyes, mouth facial expressions, eyebrows, or respiration [12][13][14].
All three categories have some limitations [2][15]. Biological-based systems can detect drowsiness in the initial stages due to their ability to compare the continuous changes in the physiological signals, but, in most biological-based systems, it is demanded that electrodes be connected to the driver’s body. This setup is usually inconvenient and uncomfortable for the driver. It also involves noise that affects the signal quality, leading to decreased accuracy. Vehicle-based systems depend generally on vehicle types, and can greatly be affected by multiple factors, including road characteristics, climate conditions, and the driver’s experience, habits, and ability to drive. Limitations of the image-based systems are strictly related to the quality of the camera used and its adaptability to different lighting conditions. The existence of objects covering parts of the face, such as glasses, sunglasses, masks, etc., can also affect the accuracy of image-based DDD systems. However, among these three systems, image-based systems are considered to be fully non-invasive, low cost, and minimally affected by road conditions. Therefore, image-based measures are widely deployed to develop versatile, affordable, real-time and, fully portable DDD devices [2][12][13][14][16][17].
In this work, we present a new image-based DDD system. It uses a unique combination of features derived from the driver’s facial parameters to train and test three classifiers, namely Random Forest (RF), sequential Neural Networks (NN), and linear Support Vector Machine (SVM). The features used in this system are Eye Aspect Ratio (EAR), Mouth Aspect Ratio (MAR), and head pose estimation. The proposed system is convenient for the driver in the sense that it does not require any sensors or equipment to be attached to the driver’s body. It is adaptable to be used in different vehicles, including buses, cars, motorcycles, and others. Evaluations of the proposed system on the National Tsing Hua University DDD (NTHUDDD) video dataset show that it can achieve accuracy up to 99%, indicating that it is an effective solution.
2. Driver Drowsiness Detection with Visual Features
The flowchart in Figure 1 shows the design flow of the proposed drowsiness-detection system. The system design consists of five main steps. In the first step, the system starts by capturing a video that monitors the driver’s head and extracts frames from it. The second step is preprocessing, where first, the Blue, Green, and Red (BGR) colored frames are each converted to grayscale. Then, for the eyes and mouth region, face detection is applied by utilizing the Dlib Histogram of Oriented Gradients (HOG) face detector [18]. The Dlib facial landmarks detector is then applied to extract the eyes and mouth regions. Lastly, in the preprocessing step, to capture the head region, MediaPipe face mesh [19] is used to obtain a 3D map of the face and extract the 3D nose coordinates to use as a reference to estimate the driver’s head position.

Figure 1. System design.
The third step involves calculating for each frame a feature vector containing the EAR, MAR, and the nose X–Y coordinates, and storing them in a separate list. This is repeated to populate a window (matrix) with feature vectors corresponding to 15 consecutive frames. Once the system has the first 15 feature vectors stored, it feeds them to the trained classification model which results in initial drowsy or alert labels. The final decision of whether the driver is drowsy is taken if the drowsy label is produced 15 consecutive times and an alarm will sound to alert the driver. Otherwise, the driver will be considered alert. As the process continues, the system employs the moving window concept. The moving window is fixed in size and can only take 15 feature vectors corresponding to a matrix of dimension 4 × 15. When a new frame is recorded, its corresponding feature vector is fed into the feature window while the oldest feature vector in the window is dropped out.
3. Results
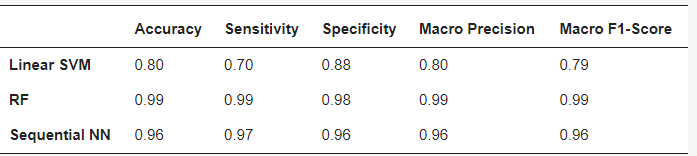
Table 6 illustrates the results of the trained models. The results show that the best performance is achieved by the RF model. When analyzing the results, it is evident that the RF model gave an almost perfect performance as it achieved 99% in accuracy, sensitivity, specificity, macro precision, and macro F1-score. In terms of the performance of the sequential NN model, it achieved second-best results with 96% accuracy, 97% sensitivity, and 96% specificity, macro precision & macro F1-score. As for the SVM model, it achieved the lowest results, where it showed 80% accuracy, 70% sensitivity, and 88% specificity.
Table 6. Results of the proposed DDD system.
The above results clearly show that our proposed system can differentiate drowsy drivers from alert ones. It is easy to use and convenient for the drivers as it is non-invasive, non-intrusive, and does not require any sensors or equipment to be attached to the driver’s body. It is also adaptable to be used in different vehicles, including buses, trucks, cars, motorcycles, and construction vehicles.
In conclusion, in this paper, we proposed a real-time image-based drowsiness detection system. In order to implement drowsiness detection, a webcam was used to detect the driver in real-time and extract the drowsiness signs from the eyes, mouth, and head. Then three classifiers were applied at the final stage. When a drowsiness sign is detected, an alarm sounds, alerting the driver and ensuring road safety. Evaluation of system performance over the NTHUDDD dataset resulted in an accuracy of 99% for the RF classifier. In the future, we plan to develop a mobile application to allow users to easily use the system while driving. Furthermore, to overcome the limitation of the HOG face detector, we intend to use a more advanced camera that can adapt to the changes in lighting intensity and automatically detect and focus on the driver’s face.
This entry is adapted from the peer-reviewed paper 10.3390/jimaging9050091
References
- Al Amir, S. Road Accidents in UAE Caused 381 Deaths Last Year. Available online: https://www.thenationalnews.com (accessed on 10 December 2022).
- Albadawi, Y.; Takruri, M.; Awad, M. A review of recent developments in driver drowsiness detection systems. Sensors 2022, 22, 2069.
- Ramzan, M.; Khan, H.U.; Awan, S.M.; Ismail, A.; Ilyas, M.; Mahmood, A. A survey on state-of-the-art drowsiness detection techniques. IEEE Access 2019, 7, 61904–61919.
- Sikander, G.; Anwar, S. Driver fatigue detection systems: A review. IEEE Trans. Intell. Transp. Syst. 2018, 20, 2339–2352.
- Pratama, B.G.; Ardiyanto, I.; Adji, T.B. A review on driver drowsiness based on image, bio-signal, and driver behavior. In Proceedings of the IEEE 2017 3rd International Conference on Science and Technology-Computer (ICST), Yogyakarta, Indonesia, 11–12 July 2017; pp. 70–75.
- Kaur, R.; Singh, K. Drowsiness detection based on EEG signal analysis using EMD and trained neural network. Int. J. Sci. Res. 2013, 10, 157–161.
- Kundinger, T.; Sofra, N.; Riener, A. Assessment of the potential of wrist-worn wearable sensors for driver drowsiness detection. Sensors 2020, 20, 1029.
- Sahayadhas, A.; Sundaraj, K.; Murugappan, M.; Palaniappan, R. Physiological signal based detection of driver hypovigilance using higher order spectra. Expert Syst. Appl. 2015, 42, 8669–8677.
- Khushaba, R.N.; Kodagoda, S.; Lal, S.; Dissanayake, G. Driver drowsiness classification using fuzzy wavelet-packet-based feature-extraction algorithm. IEEE Trans. Biomed. Eng. 2010, 58, 121–131.
- McDonald, A.D.; Schwarz, C.; Lee, J.D.; Brown, T.L. Real-time detection of drowsiness related lane departures using steering wheel angle. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting; Sage Publications: Los Angeles, CA, USA, 2012; Volume 56, pp. 2201–2205.
- Ma, J.; Murphey, Y.L.; Zhao, H. Real time drowsiness detection based on lateral distance using wavelet transform and neural network. In Proceedings of the 2015 IEEE Symposium Series on Computational Intelligence, Cape Town, South Africa, 7–10 December 2015; pp. 411–418.
- Kiashari, S.E.H.; Nahvi, A.; Bakhoda, H.; Homayounfard, A.; Tashakori, M. Evaluation of driver drowsiness using respiration analysis by thermal imaging on a driving simulator. Multimed. Tools Appl. 2020, 79, 17793–17815.
- Bamidele, A.A.; Kamardin, K.; Abd Aziz, N.S.N.; Sam, S.M.; Ahmed, I.S.; Azizan, A.; Bani, N.A.; Kaidi, H.M. Non-intrusive driver drowsiness detection based on face and eye tracking. Int. J. Adv. Comput. Sci. Appl. 2019, 10.
- Khunpisuth, O.; Chotchinasri, T.; Koschakosai, V.; Hnoohom, N. Driver drowsiness detection using eye-closeness detection. In Proceedings of the 2016 12th International Conference on Signal-Image Technology & Internet-Based Systems (SITIS), Naples, Italy, 28 November–1 December 2016; pp. 661–668.
- Triyanti, V.; Iridiastadi, H. Challenges in detecting drowsiness based on driver’s behavior. IOP Conf. Ser. Mater. Sci. Eng. 2017, 277, 012042.
- Knapik, M.; Cyganek, B. Driver’s fatigue recognition based on yawn detection in thermal images. Neurocomputing 2019, 338, 274–292.
- Tayab Khan, M.; Anwar, H.; Ullah, F.; Ur Rehman, A.; Ullah, R.; Iqbal, A.; Lee, B.H.; Kwak, K.S. Smart real-time video surveillance platform for drowsiness detection based on eyelid closure. Wirel. Commun. Mob. Comput. 2019, 2019, 2036818.
- Rosebrock, A. Face Detection with Dlib (Hog and CNN). Available online: https://pyimagesearch.com/2021/04/19/face-detection-with-dlib-hog-and-cnn/ (accessed on 7 May 2022).
- Kartynnik, Y.; Ablavatski, A.; Grishchenko, I.; Grundmann, M. Real-time facial surface geometry from monocular video on mobile GPUs. arXiv 2019, arXiv:1907.06724.
This entry is offline, you can click here to edit this entry!