In logistics and freight distribution, scheduling and cost efficiency are two crucial issues for transportation companies that look with favour at the innovation introduced by Intelligent Transportation Systems (ITS). Moreover, an infrastructure level of service, safety and environmental defence are important for planners and public administrations. In this sense, terminal capacity and landside operations at the maritime infrastructure represent an interesting task for the community. Thus, this paper contributes to the research by: (i) proposing a generic framework for the integration of autonomous and connected vehicles with physical infrastructures; (ii) evaluating the opportunity to manage traffic arrivals according to vehicles’ priority and testing the effects of the introduction of a buffer zone outside the maritime port; (iii) improving efficiency and security within the terminal area by reducing waiting time and avoiding interference between flows. Moreover, the proposal for a discrete-event simulation model to assess terminal capacity in a ro-ro terminal is presented. Therefore, the paper contributes to some critical aspects towards sustainable development. First, regarding policy measures and actions, it proposes a valuable tool to assess what-if scenarios. Secondly, it represents a step forward in the process of smart corridor design for freight vehicles; in fact, it proposes a tool for managing landside operations at maritime ports and focuses on intervention in solving specific barriers and bottlenecks for freight who cross a ro-ro terminal daily. Furthermore, it offers a viable solution for managing connected vehicles in a context where full automation still needs to be achieved. The results evidenced the framework’s capability to deal with the traffic demand, thus improving the efficiency of the terminal landside operations.
- Vehicles
- Digital Infrastructures
- Port Efficiency
1. Introduction
2. Connected Vehicles and Digital Infrastructures for Assessing the Port Efficiency
| Paper | Terminal | Simulation Approach | Software | Model Scope |
|---|---|---|---|---|
| Preston et al. | ro-ro | DES | not stated | Planning; Capacity |
| Iannone et al. | ro-ro | DES | ARENA | Planning Areas |
| Kaceli | ro-ro | DES | ARENA | Gate; Yard Capacity |
| Muravev et al. | ro-ro | DES | ARENA; AnyLogic | Scehduling; Capacity |
| Ozkan et al. | ro-ro | DES | not stated | Sched.; Coordination |
| Abourraja et al. | ro-ro | DES | not stated | Bert; Yard Capacity |
| Park et al. | ro-ro | DES | not stated | AVGs Introduction |
| Sharif et al. | ro-ro | Agent-Based | NetLogo | Capacity; Info |
| van Vianen et al. | Multi-Modal | DES | not stated | Stackers operations |
| Parola and Sciomachen | Multi Modal | DES | Witness | Coord. Modal Shift |
| Jovanocic | Container | DES | not stated | Truck Arrivals System |
| Azab et al. | Container | DES | FlexSim CT | TAS; Congestion |
| Neagoe et al. | Container | DES | Python | TAS; Handling |
| Nadi et al. | Container | DES | not stated | TSMS |
| Srisurin et al. | Container | DES | SIMIO | Slot Allocation; Hand. |
| Schoroer et al. | Container | DES | Delphi | Internal Transport |
| Rusca et al. | Container | DES | ARENA | Planning; Capacity |
| Carteni and De Luca | Container | DES | Witness | Planning; Capacity |
| Cimpeanu et al. | Container | DES | Witness | Planning; Berth Occ. |
| Li et al. | Container | DES | not stated | Bert; Yard Capacity |
| Alvarez et al. | Container | DES | C ++ | Bert; Yard Capacity |
| Triska et al. | Container | Monte Carlo | MatLab | Bert; Gate; Storage |
| Guan and Liu | Container | Queue Theory | not stated | Gate Capacity; Servers |
| Assumma and Vitetta | Container | Agent-based | ARENA | Planning |
| Fleming et al. | Container | Agent-based | NetLogo | Planning; Capacity |
| Chen et al. | Container | Genetic Algorithm | not stated | TAS |
| Ambrosino and Peirano | Container | Linear Optimization | C# | TAS |
| Mihn et al. | Container | Genetic Algorithm | not stated | TAS |
| Minh and Huynh | Container | Genetic Algorithm | not stated | Congestion |
| Yang et al. | Container | Queue Theory | not stated | Slot Allocation; Waterway |
-
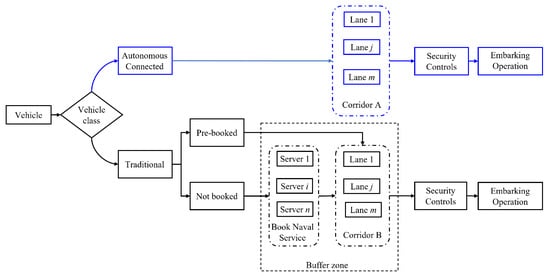
the transport companies send their daily plan to the terminal operator, pointing out the nature of the freight (dangerous, perishable, general merchandise, ...); they have to confirm the number of trucks, the platoon scheme, the desired shipping company and the naval service to board on;
-
vehicles receive routing information from smart road devices installed in the corridors and the terminal cloud system through a communication protocol, the same reports about traffic conditions around the infrastructure, queue estimation in the buffer area, vessel approaching and final direction;
-
the planned route, the next vessel berthing and available space are stored in the system; moreover, to avoid long waiting, the system coordinates approaching and manoeuvres as well corridors assignment;
-
the terminal area is provided with a stable cloud monitoring system equipped with roadside units and an optimization traffic control system that enables communication highlighting yard occupation (of the buffer area) and the number of vehicles waiting for the embankment.
3. Experimental analysis
4 Discussion
This entry is adapted from the peer-reviewed paper 10.3390/su15108168
References
- Comi, A.; Nuzzolo, A. Exploring the relationships between e-shopping attitudes and urban freight transport. Transp. Res. Procedia 2016, 12, 399–412.
- Nogueira, G.P.M.; de Assis Rangel, J.J.; Croce, P.R.; Peixoto, T.A. The environmental impact of fast delivery B2C e-commerce in outbound logistics operations: A simulation approach. Clean. Logist. Supply Chain 2022, 5, 100070.
- Di Gangi, M.; Polimeni, A.; Belcore, O.M. Freight Distribution in Small Islands: Integration between Naval Services and Parcel Lockers. Sustainability 2023, 15, 7535.
- European Commission. Roadmap to a Single European Transport Area—Towards a Competitive and Resource Efficient Transport System, EUR-Lex 2011, 52011DC0144. Available online: https://eur-lex.europa.eu/LexUriServ/LexUriServ.do?uri=COM:2011:0144:FIN:en:PDF (accessed on 3 April 2023).
- Comi, A.; Polimeni, A. Assessing the Potential of Short Sea Shipping and the Benefits in Terms of External Costs: Application to the Mediterranean Basin. Sustainability 2020, 12, 5383.
- Assoporti. L’Italia dei Porti. 2022. Available online: https://www.assoporti.it (accessed on 17 May 2023).
- Kim, E.; Kim, Y.; Park, J. The Necessity of Introducing Autonomous Trucks in Logistics 4.0. Sustainability 2022, 14, 3978.
- Shaout, A.; Colella, D.; Awad, S. Advanced Driver Assistance Systems - Past, present and future. In Proceedings of the 2011 Seventh International Computer Engineering Conference (ICENCO’2011), Cairo, Egypt, 27–28 December 2011; pp. 72–82.
- Kukkala, V.K.; Tunnell, J.; Pasricha, S.; Bradley, T. Advanced Driver-Assistance Systems: A Path Toward Autonomous Vehicles. IEEE Consum. Electron. Mag. 2018, 7, 18–25.
- SAE International. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles; SAE International: Warrendale, PA, USA, 2021.
- Pereira, A.M.; Anany, H.; Přibyl, O.; Přikryl, J. Automated vehicles in smart urban environment: A review. In Proceedings of the 2017 Smart City Symposium Prague (SCSP), Prague, Czech Republic, 25–26 May 2017; pp. 1–8.
- Guanetti, J.; Kim, Y.; Borrelli, F. Control of connected and automated vehicles: State of the art and future challenges. Annu. Rev. Control 2018, 45, 18–40.
- Di Salvo, R.; Galletta, A.; Belcore, O.M.; Villari, M. Modeling Users’ Performance: Predictive Analytics in an IoT Cloud Monitoring System. In Proceedings of the Service-Oriented and Cloud Computing: 8th IFIP WG 2.14 European Conference, ESOCC 2020, Heraklion, Crete, Greece, 28–30 September 2020; pp. 149–158.
- Shladover, S.E. Connected and automated vehicle systems: Introduction and overview. J. Intell. Transp. Syst. 2018, 22, 190–200.
- Qin, K.; Wang, B.; Zhang, H.; Ma, W.; Yan, M.; Wang, X. Research on Application and Testing of Autonomous Driving in Ports; Technical Report; SAE International: Warrendale, PA, USA, 2020.
- Fiedler, R.; Bosse, C.; Gehlken, D.; Brümmerstedt, K.; Burmeister, H. Autonomous Vehicles’ Impact on Port Infrastructure Requirements; Fraunhofer Center for Maritime Logistics and Services CML: Hamburg, Germany, 2019.
- Fishman, G.S. Discrete-Event Simulation; Springer: New York, NY, USA, 2001.
- Preston, G.C.; Horne, P.; Scaparra, M.P.; O’Hanley, J.R. Masterplanning at the Port of Dover: The use of discrete-event simulation in managing road traffic. Sustainability 2020, 12, 1067.
- Iannone, R.; Miranda, S.; Prisco, L.; Riemma, S.; Sarno, D. Proposal for a flexible discrete event simulation model for assessing the daily operation decisions in a Ro–Ro terminal. Simul. Model. Pract. Theory 2016, 61, 28–46.
- Keceli, Y. A simulation model for gate operations in multi-purpose cargo terminals. Marit. Policy Manag. 2016, 43, 945–958.
- Özkan, E.D.; Nas, S.; Güler, N. Capacity analysis of Ro-Ro terminals by using simulation modeling method. Asian J. Shipp. Logist. 2016, 32, 139–147.
- Abourraja, M.N.; Kringos, N.; Meijer, S. Exploiting simulation model potential in investigating handling capacity of Ro-Ro terminals: The case study of Norvik seaport. Simul. Model. Pract. Theory 2022, 117, 102513.
- Abourraja, M.N.; Rouky, N.; Kornevs, M.; Meijer, S.; Kringos, N. A simulation-based decision support framework devoted to Ro-Ro terminals: Design, implementation and evaluation. Comput. Ind. Eng. 2023, 180, 109248.
- Park, S.H.; Hwang, J.; Yun, S.; Kim, S. Automatic Guided Vehicles Introduction Impacts to Roll-On/Roll-Off Terminals: Simulation and Cost Model Analysis. J. Adv. Transp. 2022, 2022, 6062840.
- Muravev, D.; Aksoy, S.; Rakhmangulov, A.; Aydogdu, Y.V. Comparing model development in discrete event simulation on Ro-Ro terminal example. Int. J. Logist. Syst. Manag. 2016, 24, 283–297.
- Sharif, O.; Huynh, N.; Vidal, J.M. Application of El Farol model for managing marine terminal gate congestion. Res. Transp. Econ. 2011, 32, 81–89.
- Parola, F.; Sciomachen, A. Modal split evaluation of a maritime container terminal. Marit. Econ. Logist. 2009, 11, 77–97.
- Van Vianen, T.; Ottjes, J.; Lodewijks, G. Simulation-based rescheduling of the stacker–reclaimer operation. J. Comput. Sci. 2015, 10, 149–154.
- Jovanovic, R. Optimizing truck visits to container terminals with consideration of multiple drays of individual drivers. J. Optim. 2018, 2018, 5165124.
- Azab, A.; Karam, A.; Eltawil, A. A simulation-based optimization approach for external trucks appointment scheduling in container terminals. Int. J. Model. Simul. 2020, 40, 321–338.
- Neagoe, M.; Hvolby, H.H.; Taskhiri, M.S.; Turner, P. Using discrete-event simulation to compare congestion management initiatives at a port terminal. Simul. Model. Pract. Theory 2021, 112, 102362.
- Nadi, A.; Nugteren, A.; Snelder, M.; van Lint, J.; Rezaei, J. Advisory-Based Time Slot Management System to Mitigate Waiting Time at Container Terminal Gates. Transp. Res. Rec. 2022, 2676, 656–669.
- Srisurin, P.; Pimpanit, P.; Jarumaneeroj, P. Evaluating the long-term operational performance of a large-scale inland terminal: A discrete event simulation-based modeling approach. PLoS ONE 2022, 17, e0278649.
- Schroër, H.J.; Corman, F.; Duinkerken, M.B.; Negenborn, R.R.; Lodewijks, G. Evaluation of inter terminal transport configurations at Rotterdam Maasvlakte using discrete event simulation. In Proceedings of the Winter Simulation Conference, Savannah, GA, USA, 7–10 December 2014; pp. 1771–1782.
- Rusca, F.; Popa, M.; Rosca, E.; Rusca, A. Simulation model for maritime container terminal. Transp. Probl. 2018, 13, 47–54.
- Cartenì, A.; de Luca, S. Tactical and strategic planning for a container terminal: Modelling issues within a discrete event simulation approach. Simul. Model. Pract. Theory 2012, 21, 123–145.
- Cimpeanu, R.; Devine, M.T.; O’Brien, C. A simulation model for the management and expansion of extended port terminal operations. Transp. Res. Part E Logist. Transp. Rev. 2017, 98, 105–131.
- Li, N.; Chen, G.; Govindan, K.; Jin, Z. Disruption management for truck appointment system at a container terminal: A green initiative. Transp. Res. Part D Transp. Environ. 2018, 61, 261–273.
- Alvarez, J.F.; Longva, T.; Engebrethsen, E.S. A methodology to assess vessel berthing and speed optimization policies. Marit. Econ. Logist. 2010, 12, 327–346.
- Triska, Y.; Frazzon, E.M.; Silva, V.M.D. Proposition of a simulation-based method for port capacity assessment and expansion planning. Simul. Model. Pract. Theory 2020, 103, 102098.
- Guan, C.; Liu, R. Container terminal gate appointment system optimization. Marit. Econ. Logist. 2009, 11, 378–398.
- Guan, C.Q.; Liu, R. Modeling gate congestion of marine container terminals, truck waiting cost, and optimization. Transp. Res. Rec. 2009, 2100, 58–67.
- Assumma, V.; Vitetta, A. Microsimulation models in intermodal container terminals: Ordinary and perturbed conditions. In Proceedings of the 7th International Industrial Simulation Conference, Istanbul, Turkey, 13–16 July 2009; pp. 196–200.
- Fleming, M.; Huynh, N.; Xie, Y. Agent-based simulation tool for evaluating pooled queue performance at marine container terminals. Transp. Res. Rec. 2013, 2330, 103–112.
- Chen, G.; Govindan, K.; Yang, Z. Managing truck arrivals with time windows to alleviate gate congestion at container terminals. Int. J. Prod. Econ. 2013, 141, 179–188.
- Ambrosino, D.; Peirano, L. Truck Arrival Management At Maritime Container Terminals. ECMS 2016, 2016, 114–120.
- Minh, C.C.; Noi, N.V. Optimising truck arrival management and number of service gates at container terminals. Marit. Bus. Rev. 2023, 8, 18–31.
- Minh, C.C.; Huynh, N. Optimal design of container terminal gate layout. Int. J. Shipp. Transp. Logist. 2017, 9, 640–650.
- Yang, Z.; Chen, K.; Notteboom, T. Optimal design of container liner services: Interactions with the transport demand in ports. Marit. Econ. Logist. 2012, 14, 409–434.
- Di Gangi, M.; Belcore, O.M. Risk reduction in transport system in emergency conditions: A framework for decision support systems. Saf. Secur. Eng. IX 2022, 206, 299.
- Di Gangi, M.; Marco Belcore, O.; Polimeni, A. An Overview on Decision Support Systems for Risk Management in Emergency Conditions: Present, Past and Future Trends. Int. J. Transp. Dev. Integr. 2023, 7 (1), 45-53.