2. Pipeline Failure Detection and Localisation Techniques
Existing classical techniques for monitoring pipelines are based on research works and techniques, such as robots, computational fluid dynamics, and hybrid systems. Robots are mainly used to monitor pipeline integrity. You Na et al.
[10][18] proposed the use of biometric robots for detecting anomalies in pipelines. With an insect-like crawling feature, the proposed robot can effectively travel along the different paths of the complex pipeline network. Sujatha et al.
[11][19] proposed a prototype robot for real-time, continuous, and autonomous monitoring of the pipeline. This was enabled by integrating the robots with a mobile application for tracking changes, which could be customised to the needs. A preliminary test conducted on the usage of the robots shows the robustness and practicability of usage. Kim et al.
[12][10] developed a sensor-based system for pipeline monitoring and maintenance by combining topology-aware robots, mobile sensors, and a radio frequency identification (RFID) sensor-based localisation technique. Their integrated system is expected to prevent failures through the early detection and reporting of anomalies, after which, the robotic agents provide recovery by conducting repairs. Several experiments were conducted showing the cost-effectiveness and scalability of their system. However, research on robotics for overall pipeline monitoring is still in its early stages and has not been largely adopted due to its implementation complexity and the performance limitations for industrial purposes. Currently, pipeline inspection gauges are more commonly used to monitor structural integration with various limitations, such as one-directional movements.
Unlike robots, non-intrusive techniques exist, such as those based on computational fluid dynamics to detect and localise leakages in pipelines. Ostapkowicz, in his work
[13][14], demonstrated the use of statistical leakage detection techniques based on pressure gradients and negative pressure waves. Experimental results were obtained by taking the pressure measurements and the fluid transmission speed. Both LDTs had good localisation accuracy and differed mainly in terms of energy consumption, i.e., the negative pressure wave had higher energy consumption because of its sampling rate compared to the gradient-based method, with lower energy consumption and accuracy. Similarly, Beush-ausen et al.
[14][20] proposed transient leakage detection through an integrated analysis of the pressure and flow rate and the use of modified volume balance. With this technique, leakage detection was shown; however, some challenges persist. For instance, the localisation error was up to ten kilometres, some discrepancies in the flow metre were recorded, and there were limitations on the communication bandwidth and the effect of the type of fluid on this result. On the other hand, Santos et al.
[15][21] proposed a detection method based on the usage of Doppler ultrasonic flow metres and transit-time ultrasonic flow metres. They carried out simulations to determine the impact of air bubbles on the accuracy of the detection and to understand its effectiveness. Karray et al.
[16][22] also presented a leak detection technique based on the modified time of arrival difference, predictive Kalman filter, and the system-on-a-chip wireless sensor node. However, this work focused on reducing the energy consumption of LDMSs by incorporating data filtering, preprocessing, and compression in the algorithm. While existing statistical techniques present high accuracy in the DAL of leakages, challenges still exist, including energy consumption and single point of failure (SPOF) related to centralised implementation.
Other classical methods of DAL exist based on remote sensing, such as satellites, helicopters, vehicles, and unmanned aerial vehicles (UAVs) using radar, RGB images, or specialised cameras. S, Kostianoy et al.
[17][18][19][23,24,25] presented the efficiency of using satellite systems for monitoring various pipeline transportation aspects. These include differentiating anthropogenic and natural effects of pipelines, ports, terminals, and the ecological impacts on the water bodies in proximity. The environmental impacts were evaluated using an integrated sea track web model to measure the spatial and temporal characteristics. Likewise, other works
[20][21][26,27] demonstrated the use of a hyperspectral satellite for remote sensing in pipeline transportation by monitoring chemicals, gases, and other dynamic changes on the land, enabling the early detection of pipeline degradation. Although satellite-based monitoring provides multi-dimensional monitoring for pipelines and is suitable for difficult terrain, it is expensive to implement. Human-based monitoring systems, on the other hand, involve the use of observer vehicles, helicopters, or UAVs for the visual DAL of leakages (in addition to remote sensing, in some cases). Security personnel and community-based surveillance are also used to detect leakages, specifically those resulting from vandalism because of the size. However, studies
[7][8][9][7,8,9] show that these techniques are expensive, ineffective, and impractical due to the very long detection times (days to weeks) and hazards to the environment.
3. WSN/IoT-Based Pipeline Monitoring
IoT-based systems are enabled by wireless sensor networks (WSNs) consisting of multiple sensors for data collection. Many research studies
[22][23][24][12,28,29] have enumerated their advantages in terms of vandalisation, maintainability, and energy consumption, among others, for pipeline monitoring.
Khan et al.
[7] proposed an IoT architecture consisting of three layers for the different sectors of the oil and gas industry. Their aim was to improve reliability and robustness through a hierarchical design that enabled performance enhancement and predictive maintenance via collaboration, reliable communication, and intelligent decision-making among the nodes. Yelmarthi et al.
[25][30] proposed a four-layered architectural hybrid framework (wired and WSN). The aim was to provide a low-power and generic framework usable for diverse applications. Hence, various experiments involving damage detection, posture analysis, and physical activities were conducted to test the practicability.
In addition to architectural design, an important factor that affects the efficiency of the WSN is the sensor placement strategy. Berry et al.
[26][31] proposed sensor placements in pipeline networks based on mixed integer programming (MIP), based on the temporal characteristics of the contamination impacts noted in the pipelines. Tests were carried out using EPANET, SNL-1, and SNL-2 to analyse the sensitivity of the placement to the contamination in a periodic manner. The sensitivity analysis was based on the consensus of the placement, i.e., where two sensor placements were defined as their intersection size divided by the number of sensors in each placement. The results show that the average pairwise consensus was in the range of 86.5% to 100%, with a maximum standard deviation of 1.3%.
Similarly, Sela et al.
[27][32] worked on the efficient failure detection of water pipelines through optimal sensor placement based on multiple approaches. The preliminary step utilised an approximate solution of the minimum set cover of the minimum test cover (MTC) problem. They also proposed a novel technique using an augmented greedy MTC-based algorithm. To determine the efficiency of this approach, tests were conducted on a water network. The results show that the novel technique is three to eight times faster than the other. Lina et al.
[28][33] extended these results by proposing a robust placement using a robust greedy approximation (RGA) and robust mixed integer approximation (RMIO) as enhancements to the nominal greedy approximation and mixed integer optimisation problem through redundancy. Experimental results show that both RGA and RMIO outperformed their nominal versions.
Likewise, Krause et al.
[29][34] aimed to mitigate the intrusion of pipeline networks through robust sensor placements, they optimised this placement by utilising the minimax algorithm. The experimental results included the extension of the multi-criteria optimisation and efficient placement for large networks, i.e., up to 91% of the maximum placement score achievable. Sarrate et al.
[30][35] studied the impact of sensor accuracy on infrastructural analysis using the isolability index, i.e., setting up the placement issue on a fault diagnosis-based performance maximisation criterion in contrast to the placement following non-linear physical laws leading to mesh networks. Tests conducted on water networks to detect leakages showed improvement in fault detection and the removal of the complexity of mesh connectivity in such extensive networks.
To reduce energy consumption and improve the sensors’ lifetime, Guo et al.
[31][36] proposed a sensor placement on an oil pipeline by considering the maximum transmission range of the sensors and messages relayed in a hop-by-hop manner, which also reduced the number of sensors placed on the pipeline. However, Elnaggar et al.
[32][37] took a different approach to the reduction of energy consumption through sensor placement for oil pipeline monitoring. His approach involved the use of ant colony optimisation and a genetic algorithm. The simulations, which were conducted on a pipeline segment to test the communication level, showed poorer performances in the genetic and greedy algorithms compared to the ant colony optimisation. However, they maintained similar results in the overall lifetime optimisation of the WSN. Al Baseer et al.
[33][38] proposed sensor grouping and using an adaptive clustering algorithm for intermediate data delivery to reduce energy consumption. As a result, a significant reduction between 300% to over 500% was recorded as a result of the load-sharing mechanism among the cluster heads. Moreover, this approach resulted in up to a 62% reduction compared to the heuristic approaches. Further evaluation of the experimental results shows a 50% reduction in consumption. Li et al.
[34][39], on the other hand, proposed a generic sensor placement to optimise energy consumption in a sensor network. To achieve this, they utilised retransmission and discrete power control for single- and double-tier uniformly and non-uniformly distributed WSNs.
Multiple LDTs have been proposed or implemented based on various WSN architectural designs. Sadeghioon et al.
[35][40] proposed a novel algorithm for leakage DAL in underground pipelines aimed at improving the sensitivity of DAL. The algorithm is based on the relative measurement of the pressure and changes that occur as a result of the interaction between the hydrocarbon and the soil surrounding the area of the leakage. The test showed an improvement in sensitivity compared to the threshold-based techniques. They furthered their research
[36][11] by introducing a specialised sensor based on a force-sensitive resistor for ultra-low-power DAL. Still on the reduction of energy consumption, Saeed et al.
[37][41] proposed a reliable WSN-based system for oil and gas pipelines spanning over a large geographical area. The conducted preliminary tests on energy consumption showed promising results.
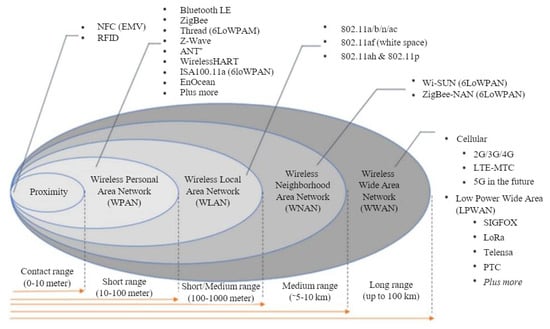
One of the key factors in designing an efficient and reliable WSN/IoT-based infrastructural monitoring system is the communication protocol utilised in the system. Sensor nodes used in WSN/IoT-based systems are constrained devices that are limited by several factors, such as energy consumption, which makes existing cellular communication networks, such as 3G, 4G, LTE, and others, unsuitable for their usage
[38][42]. Hence, alternative protocols, as shown in
Figure 1, are proposed to specifically cater to the needs of IoT systems. These protocols are broadly categorised into short- and long-range communication protocols and mainly differ in their topology, communication range, throughput, and energy consumption.
Figure 1. Wireless communication technologies [38]. Wireless communication technologies [42].
Short-range communication protocols include IEEE 802.15.4 (Zigbee), IEEE 802.15.1 (Bluetooth LE), 6LowPan, Wi-Fi, and others, with a maximum communication range of about 100 m. They share some similarities, such as a throughput of 20 kbps
[39][43] and a mesh topology for Zigbee and 6Lowpan, while Bluetooth LE, on the other hand, has a point-to-point topology.
Long-range protocols (low power wide area network protocols—LPWANs) covering up to 50 km are further divided into licensed and unlicensed LPWANs
[40][44]. The Third Generation Partnership Project (3GPP) NB-IoT is an example of a licensed LPWAN operating on a licensed spectrum of a 200k Hz band. Its connection density involves up to one hundred thousand devices. Sigfox and LoRaWAN, on the other hand, are examples of unlicensed LPWANs. They both operate on the 868 MHz band in Europe with LoRaWAN also operating in other radio bands. Sigfox uses an ultra-narrowband signal that further reduces energy consumption and is limited by the number of daily message deliveries depending on the data rate (usually up to 100 bps). LoRaWAN also has a low data rate, and the throughput depends on multiple factors, i.e., the size of the bandwidth and the spreading factor.