Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 1 by Kai Zhou and Version 2 by Conner Chen.
With the rapid development of the electric vehicle (EV) industry, charging facilities for electric vehicles are gradually improving, thus meeting the demand for fast and safe charging.
- electric vehicle
- fast-charging system
- AC/DC converter
1. Charging Level of Electric Vehicles
Electric vehicle (EV) charging systems can be divided into slow- and fast-charging systems. Slow-charging systems are generally defined as Level 1 and Level 2 on-board charging systems. Level 1 on-board charging systems are slow and take about 8–10 h to fully charge a power battery. They are primarily used in residential buildings and the output power is usually less than 10 kW. In contrast, Level 2 charging systems take less time than Level 1 systems to fully charge a battery. They are usually used in shopping malls, public facilities, etc., and the power can reach 20 kW [1][28].
Currently, there are two general topologies for slow-charging systems, namely on-board charging systems. One is a single-stage topology with an uncontrolled rectifier and high-frequency DC/DC converter. This topology includes forward, flyback, push-pull, half-bridge, and full-bridge. Single-stage topology has the advantages of a simple structure, smaller number of components, small size, etc., but because it is directly connected to the grid, it can easily pollute the grid. The other is a two-stage charging system with power factor correction in the front stage and a DC/DC converter in the rear stage. The two-stage charging system can effectively address the issues of the low power factor and serious harmonic pollution but it has a high cost and low efficiency. Currently, the conventional PID control method is widely used for slow-charging systems but more advanced control methods, such as BP neural network PID control methods and fuzzy adaptive PID control methods, have also been developed, which can significantly affect the charging output characteristics.
As the number of EVs in use has increased, so has consumer demand for faster charging systems, as slow-charging systems have a long charging time and low power output. Fast-charging systems are a type of non-vehicle charging system that can be classified into fast and ultra-fast types.
Table 1 shows the types and levels of EV charging, and Table 2 summarizes the current advanced fast/ultra-fast-charging systems with hundred-kilowatt power levels.
Table 1.
Electric vehicle charging types and levels.
| Charging Type | Charging Location | Specifications | Charging Time (Battery Capacity) |
Criterion | ||
|---|---|---|---|---|---|---|
| (20–50 kWh) | ||||||
Table 2.
Characteristics of the 100-kilowatt-class of fast/ultra-fast-charging systems.
| Manufacturer and Model | Power/kW | Input Voltage/V | Output Voltage/V | Output Current/A | Supported Standards | Peak Efficiency/% | Weight/Ibs | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Voltage/V | Current/A | Power/kW | |||||||||
| Level 1 | On-board | 120/230 | 12–16 | 1.44–1.92 | 480 Vac ± 10%11–36 h | 500 |
200(16–50 kWh) | International Electrotechnical Commission (IEC) | |||
| CCS Combo 1, CHAdeMO | 95 | 208/240 | 15–80 | 3.1–19.2 | |||||||
| EVBox Troniq 100 | 2535 | ||||||||||
| Level 2 | On-board | 2–6 h | (16–30 kWh) | ||||||||
| 100 | |||||||||||
| PHIHONG Integrated Type | 120 | 380/480 Vac ± 10% | 200–750 | 240 | GB/T 20234.3 | 93.5 | 528 | Level 3 (Fast) | Off-board | 300–600 | ≤400 |
| Tesla Supercharger | 135 | 380–480 Vac | 50–410 | 50–350 | 330≤30 min (20–50 kWh) |
||||||
| Super | charger | 91 | 1323 | Ultra-fast | Off-board | >800 | |||||
| EVTEC espresso and charger | 150 | >400 | ≥400 | ≈10 min | 400 Vac ± 10% |
170–940 | 50–400 | SAE Combo 1, CHAdeMO | 93 | 881 | |
| Delta | 200 | 400 Vac ± 10% | 200–1000 | 350–500 | CHAdeMO, CCS | 94 | 992 | ||||
| ABB Terra HP | 350 | 400 Vac ± 10% | 150–920 | 500 | SAE Combo 1, CHAdeMO 1.2 | 95 | 2954 | ||||
| Tritium Veefil PK | 475 | 480 Vac | 920 | 500 | CHAdeMO, CCS | 98.5 | 1540 |
2. Electric Vehicle Fast-Charging System Architecture
EV charging systems generally have a centralized layout in a specific area, and the power supply typically employs AC coupling or DC coupling, that is, multiple independent charging systems use the common AC bus or common DC bus to obtain power. The configuration is shown in Figure 13.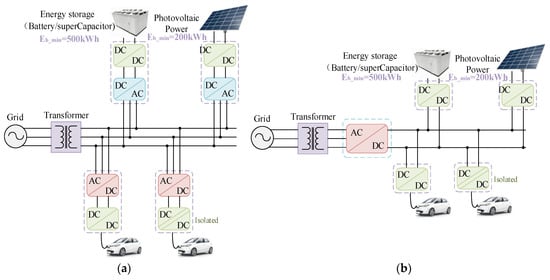
Figure 13.
Electric vehicle fast-charging system architecture. (
a
) AC coupling configuration method. (
b
) DC coupling configuration method.
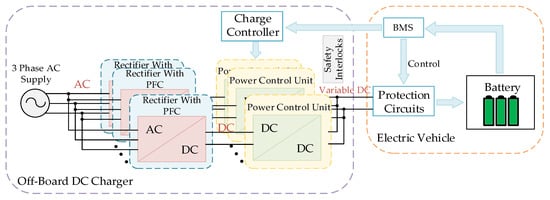
Figure 24.
Block diagram of the configuration of the fast-charging system.