The vehicle routing problem (VRP) is a complex optimization problem, in which there exists a set of clients at various locations, each one with a shipment need, and a fleet of vehicles, departing from the central depot that shall optimally satisfy the needs of the clients. The aim of a typical VRP is to find out the optimal route to minimize the total costs. Furthermore, various factors affecting route planning, such as vehicle capacity, fuel consumption, traffic congestion, etc., have to be considered to accomplish the minimization of the total route costs.
- vehicle routing problem
- urban routing
- smart cities
1. The Vehicle Routing Problem
2. Existing Routing Services
The scholars in [19][13] considered the employment of GAs to the basic VRP, in which customers are served from a single point. Vehicles are subject to a weight limit and, in some cases, to a distance limit, while only one vehicle is allowed to supply each customer. Berger and Barkaoui propose a hybrid GA solving the VRPTW [20][14]. The proposed algorithm involves the simultaneous evolution of two solutions’ populations that face separate objectives with a relaxed time constraint. The first population evolves the solutions, to minimize the total travel distance, while the second population aims to minimize the transgression of the time constraint. A novel hybrid GA for vehicle routing is proposed in [23][15]. The proposed solution finds the optimal path for the VRP, while simultaneously considering the vehicles’ heterogeneity, dual routes, and multiple depots. In [24][16] a hybrid approach that combines a GA with the Dijkstra algorithm to solve a dynamic multi-objective problem is proposed. The proposed algorithm finds the solution simultaneously for three objective functions: route length, travel time, and ease of driving. In order to apply a GA to a traffic system, the scholars use Dijkstra’s algorithm to calculate the initial population of high-quality paths. On the initial population, the proposed approach applies a GA algorithm to generate the subsequent routes’ generations. Moreover, a new approach of the ant colony algorithm to solve the VRP is presented in [27][17]. The main feature of this method is the hybridization of the solution construction mechanism of the ant colony algorithm, and the combination with a scatter search. In [32][18] the proposed ant colony algorithm is used for the time windows-dependent routing problem (TDVRPTW). In this problem, a fleet of vehicles has to deliver goods to a set of customers, where the customers’ time interval constraints should be respected and the travel time between two points depends on the departure time. In the SOUL project, information and communication technology are applied to the local food supply chain, such as the e-grocery supply chain [37][19]. The project’s architecture is made up of a central unit, a traffic handler service, a data broker layer, various hosted services, and third-party services, enabling technologies, sensors and other external data sources, and mobile devices. The aim of the proposed work is to enhance the efficiency and effectiveness of e-grocery activity in urban areas by incorporating a decision support system and a mobile application.Identifying Key Points of the Existing Routing Services
Table 1 presents a coherent summary of whether each solution takes into account each one of the identified main features. The black dots in Table 1 indicate whether a feature applies to the service. These features are the following:- The requirement for delivery to happen under specific timing restrictions
-
TiFleet manageme windownt: The rmanagequirement for delivery to happen under specific timing restrictionment of a number of vehicles and the optimization of the utilization of those.
-
Fleet mTranagemensportation cost: The comanagemenbined economic cost of a number ofroute that consists of fuel cost, vehicles and the optimization of the utilization of those maintenance cost, and human labour cost.
-
Traffic hansportation costdler: The combakined economic cost of a route that consists of fuel cost, vehicle maintenance cost, and human labour costg into account traffic conditions for optimizing the route planning.
-
Traffvel time/dic handlerstance: TakMing into account traffic conditions for optimizimising the route planninge time and distance.
-
TGravel time/distanceeen routing: Minimising the roexhaute time and distancest emissions.
-
GrVeen routinghicle capacity: MTake inimising the exhaust emissionsto consideration the capacity of a vehicle or fleet of vehicles for optimizing route planning.
-
Vehicle capacity: Take into consideration the capacity of a vehicle or fleet of vehicles for optimizing route planning.
| Project | Time Window | Green Routing | Vehicle Capacity | Fleet Management | Transportation Costs | Traffic Handler | Travel Time/Distance |
|---|---|---|---|---|---|---|---|
| Baker & Ayechew [19][13] | ∘ | ∘ | • | ∘ | ∘ | ∘ | • |
| Berger & Barkaoui [20][14] | • | ∘ | ∘ | ∘ | • | ∘ | • |
| Montemanni et al. [21][20] | ∘ | ∘ | • | • | • | ∘ | ∘ |
| Wang et al. [22][21] | • | ∘ | ∘ | ∘ | ∘ | • | • |
| Jeon et al. [23][15] | ∘ | ∘ | • | • | ∘ | ∘ | • |
| Kanoh & Kenta [24][16] | ∘ | ∘ | ∘ | ∘ | ∘ | • | • |
| Ho et al. [25][22] | ∘ | ∘ | • | • | ∘ | ∘ | • |
| Falsini et al. [26][23] | • | • | • | • | ∘ | • | • |
| Zhang & Tang [27][17] | ∘ | ∘ | • | ∘ | • | ∘ | • |
| Tatomir et al. [28][24] | ∘ | ∘ | ∘ | ∘ | ∘ | • | • |
| Yao et al. [29][25] | ∘ | ∘ | ∘ | ∘ | • | ∘ | • |
| Cheeneebash & Nadal [30][26] | • | ∘ | • | • | • | ∘ | • |
| Yu & Zhong [31][27] | • | ∘ | • | ∘ | ∘ | ∘ | • |
| Balsiciro et al. [32][18] | • | ∘ | • | • | ∘ | • | ∘ |
| Jia et al. [33][28] | ∘ | ∘ | • | ∘ | • | ∘ | • |
| Billhardt et al. [34][29] | ∘ | ∘ | ∘ | • | • | ∘ | • |
| Anagnostopoulos et al. [35][30] | ∘ | • | ∘ | • | • | • | • |
| Abousleiman & Rawashdeh [36][31] | ∘ | • | ∘ | ∘ | ∘ | ∘ | • |
| Tadei et al.[37][19] | • | • | ∘ | • | • | • | • |
| Natale et al. [38][32] | ∘ | • | ∘ | • | • | • | ∘ |
| Rivera et al. [39][33] | ∘ | ∘ | • | ∘ | ∘ | ∘ | • |
| Hendawi et al. [40][34] | ∘ | ∘ | ∘ | ∘ | ∘ | • | • |
| Qiu et al. [41][35] | ∘ | ∘ | • | • | • | ∘ | ∘ |
| Adnan & Abdulmuhsin [42][36] | ∘ | ∘ | ∘ | ∘ | • | ∘ | • |
| Rout et al. [43][37] | ∘ | • | ∘ | ∘ | ∘ | • | • |
| Akbarpour et al. [44][38] | ∘ | ∘ | • | • | • | ∘ | • |
| Nagarajan et al. [45][39] | ∘ | ∘ | ∘ | ∘ | • | ∘ | • |
- Time window:
3. Routing Services Incorporating Machine Learning Techniques
Machine L earning (ML) is the most popular technology used in addition to conventional algorithms, to improve the performance of the aforementioned algorithms.
The objective of work [46][40] is to solve the CVRP using ML-based techniques. The scholars proposed the “Learn to Improve” (L2I), a learning-based solution for CVRP that excels Operation Research (OR) algorithms in terms of solving speed. Specifically, the scholars demonstrated a learning-based algorithm for the CVRP, proposing a framework capable of splitting heuristic operators into two different groups to accelerate the operation and concentrate Reinforcement Learning (RL) on those identified as improvement operators. Lastly, they presented an ensemble technique in which RL rules are taught simultaneously, yielding improved outcomes at the same computational cost.
Work [51][41] provides a solution to the Energy Minimizing Vehicle Routing Challenge (EMVRP), a problem that focuses on locating routes of vehicles that consume the lowest amount of energy when servicing a collection of cities or clients. The scholars offer an implementation of a genetic algorithm that is augmented by ML approaches to tweak its parameters in a subsequent phase. The strategy under discussion is the application of k-means clustering, which demonstrated that the identification of distinct data clusters has a substantial influence on enhancing the effectiveness of the utilized genetic algorithm.
In order to solve one of the most common problems encountered in the field of transportation and supply chain delivery, the CVRP, a research team used a recursive approach of the k-means clustering algorithm along with the Dijkstra shortest path algorithm [55][42]. The proposed solution divides into parts the CVRP to find the optimal route. Firstly, it takes into account the capacity of the fleet of vehicles to optimize the total route’s capacity; then the k-means algorithm, considering the travel time, distance travel, and vehicles’ capacity, is implemented; in the next step, the optimal capacity of vehicles is ensured; while in the last step, the Dijkstra’s algorithm finds the shortest route for the fleet of vehicles.
4. An Efficient Solution Regarding the VRP
On the basis of the aforementioned discoveries, it initiated the design of a framework capable of delivering an efficient solution for the VRP and its variants, including the CVRP and the GVRP. The proposed system considers all the stages of the logistics workflow, from the initial order placement through the delivery of the goods to the client. Initially, the set of delivery points is processed, and batches of close geographical locations of the delivery addresses are created dynamically by utilizing ML models. Subsequently, an ensemble scheme of various genetic algorithms is used to identify the optimal route for each one of those batches. Regarding the optimal route, the vehicles start from the same starting point, make exactly one stop at each client, and finally, return to the starting point. The aforementioned procedure considers the overall COx emissions, and the total distance travelled.4.1. Experimental Results Regarding the Initial Stage of System’s Development
Regarding the initial stage of development, the first observations made were related to the percentage of routes that were successfully handled by the system, as well as the percentage of routes deemed more efficient in terms of distance travelled when compared to actual data. Initial simulations showed that the proposed ensemble scheme was able to handle successfully (identify a route that complies with the VRP restrictions) the 74% of the routes, as displayed in Figure 21.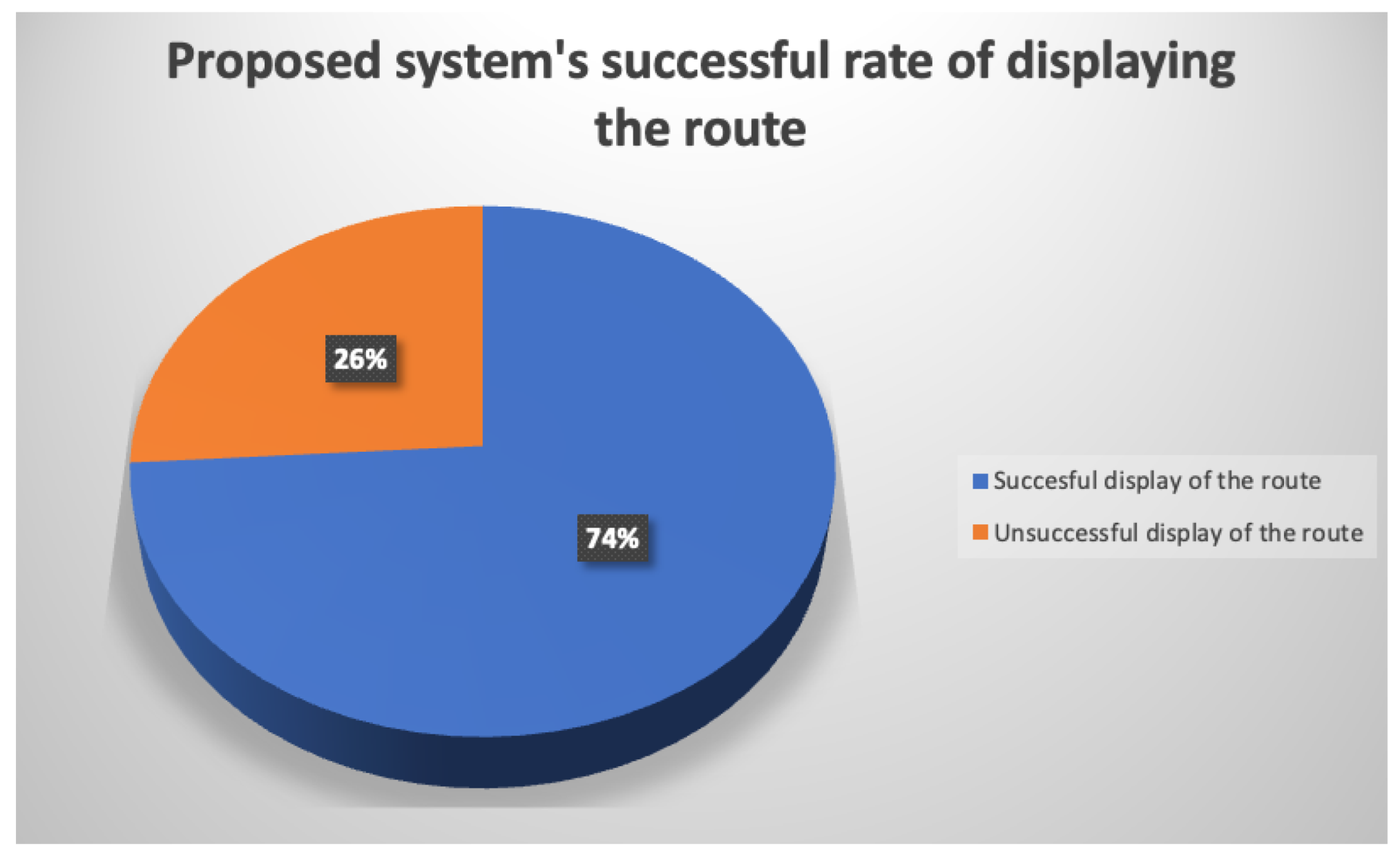
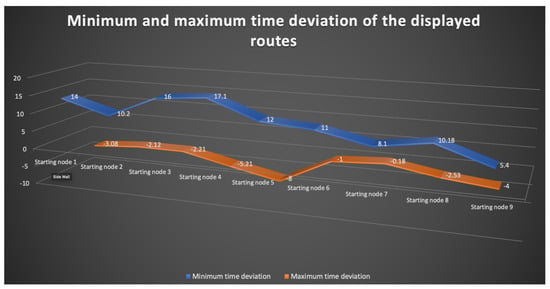
4.2. Evaluation of the Routes Displayed by the System
For each starting point, a number of routes are included in the real-world data. Figure 43 depicts the minimum (orange) and maximum (blue) distance deviation values for the whole set of routes from each starting point for the proposed system. In comparison to the real conditions of Starting Point 5, a variance of 8517 meters emerges in this set of routes.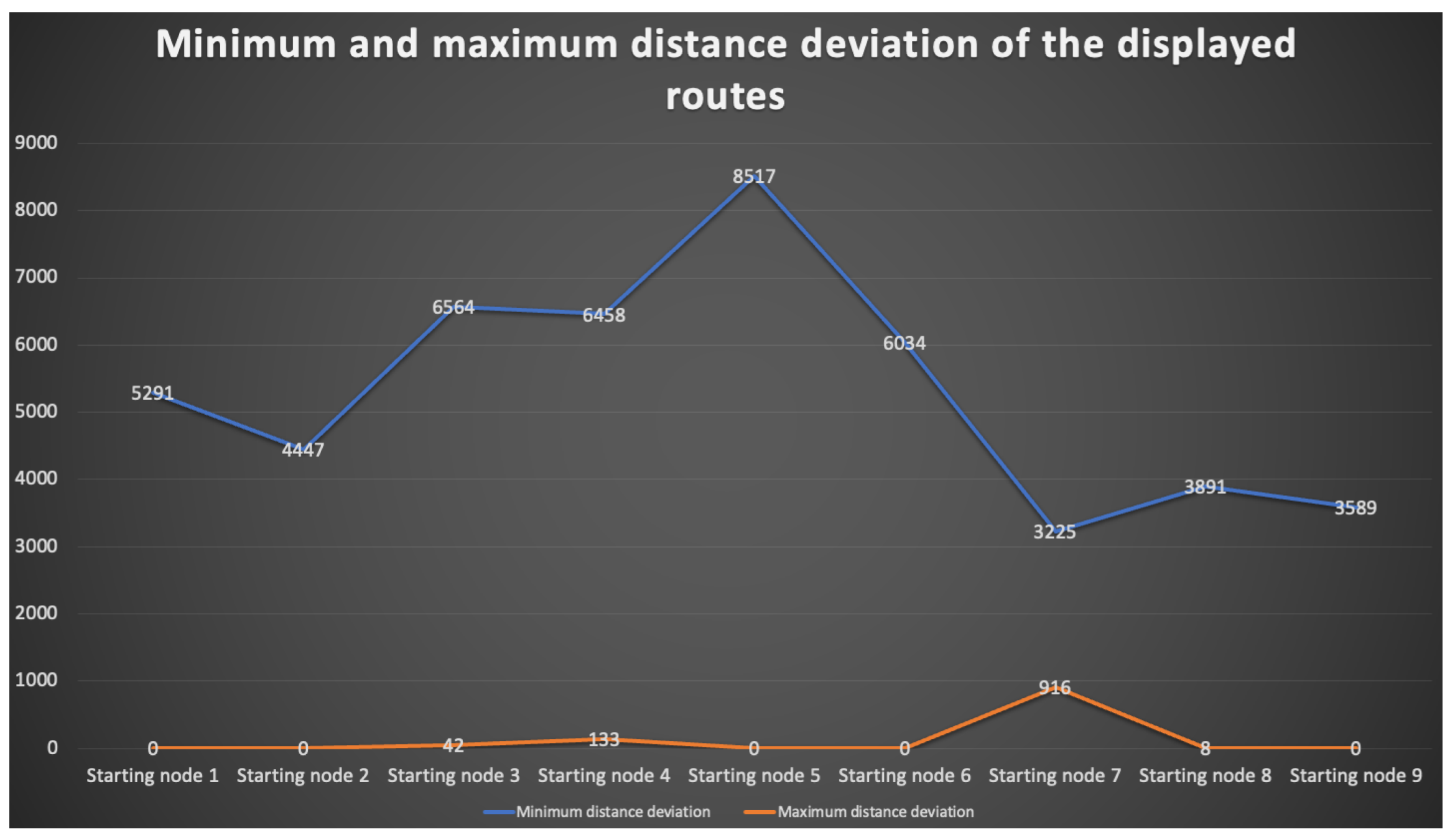
References
- El-Sherbeny, N.A. Vehicle routing with time windows: An overview of exact, heuristic and metaheuristic methods. J. King Saud-Univ.-Sci. 2010, 22, 123–131.
- Xiao, Y.; Zhao, Q.; Kaku, I.; Xu, Y. Development of a fuel consumption optimization model for the capacitated vehicle routing problem. Comput. Oper. Res. 2012, 39, 1419–1431.
- Tiwari, A.; Chang, P.C. A block recombination approach to solve green vehicle routing problem. Int. J. Prod. Econ. 2015, 164, 379–387.
- Prodhon, C.; Prins, C. A survey of recent research on location-routing problems. Eur. J. Oper. Res. 2014, 238, 1–17.
- Campbell, A.; Clarke, L.; Kleywegt, A.; Savelsbergh, M. The inventory routing problem. In Fleet Management and Logistics; Springer: Boston, MA, USA, 1998; pp. 95–113.
- Liu, S.C.; Lin, C.C. A heuristic method for the combined location routing and inventory problem. Int. J. Adv. Manuf. Technol. 2005, 26, 372–381.
- Murata, T.; Itai, R. Local search in two-fold EMO algorithm to enhance solution similarity for multi-objective vehicle routing problems. In Proceedings of the International Conference on Evolutionary Multi-Criterion Optimization, Matsushima, Japan, 5–8 March 2007.
- Adiba, E.E.; Aahmed, E.A.; Youssef, B. The green capacitated vehicle routing problem: Optimizing of emissions of greenhouse gas. In Proceedings of the 2014 International Conference on Logistics Operations Management, Rabat, Morocco, 5–7 June 2014.
- Zhang, J.; Zhao, Y.; Xue, W.; Li, J. Vehicle routing problem with fuel consumption and carbon emission. Int. J. Prod. Econ. 2015, 170, 234–242.
- Min, H. A multiobjective vehicle routing problem with soft time windows: The case of a public library distribution system. Socio-Econ. Plan. Sci. 1991, 25, 179–188.
- Liu, H.; Wang, W.; Zhang, Q. Multi-objective location-routing problem of reverse logistics based on GRA with entropy weight. Grey Syst. Theory Appl. 2012, 2, 249–258.
- Lin, C.K.Y.; Kwok, R.C.W. Multi-objective metaheuristics for a location-routing problem with multiple use of vehicles on real data and simulated data. Eur. J. Oper. Res. 2006, 175, 1833–1849.
- Baker, B.M.; Ayechew, M. A genetic algorithm for the vehicle routing problem. Comput. Oper. Res. 2003, 30, 787–800.
- Berger, J.; Barkaoui, M. A parallel hybrid genetic algorithm for the vehicle routing problem with time windows. Comput. Oper. Res. 2004, 31, 2037–2053.
- Jeon, G.; Leep, H.R.; Shim, J.Y. A vehicle routing problem solved by using a hybrid genetic algorithm. Comput. Ind. Eng. 2007, 53, 680–692.
- Kanoh, H.; Hara, K. Hybrid genetic algorithm for dynamic multi-objective route planning with predicted traffic in a real-world road network. In Proceedings of the 10th Annual Conference on Genetic and Evolutionary Computation, Atlanta, GA, USA, 12–16 July 2008.
- Zhang, X.; Tang, L. A new hybrid ant colony optimization algorithm for the vehicle routing problem. Pattern Recognit. Lett. 2009, 30, 848–855.
- Balseiro, S.R.; Loiseau, I.; Ramonet, J. An ant colony algorithm hybridized with insertion heuristics for the time dependent vehicle routing problem with time windows. Comput. Oper. Res. 2011, 38, 954–966.
- Tadei, R.; Fadda, E.; Gobbato, L.; Perboli, G.; Rosano, M. An ICT-based reference model for e-grocery in smart cities. In Proceedings of the International Conference on Smart Cities, Málaga, Spain, 15–17 June 2016.
- Montemanni, R.; Gambardella, L.M.; Rizzoli, A.E.; Donati, A.V. Ant colony system for a dynamic vehicle routing problem. J. Comb. Optim. 2005, 10, 327–343.
- Wang, J.Q.; Tong, X.N.; Li, Z.M. An improved evolutionary algorithm for dynamic vehicle routing problem with time windows. In Proceedings of the International Conference on Computational Science, Beijing China, 27–30 May 2007.
- Ho, W.; Ho, G.T.; Ji, P.; Lau, H.C. A hybrid genetic algorithm for the multi-depot vehicle routing problem. Eng. Appl. Artif. Intell. 2008, 21, 548–557.
- Falsini, D.; Fumarola, A.; Schiraldi, M.M. Sustainable trasportation systems: Dynamic routing optimization for a last-mile distribution fleet. In Proceedings of the Conference on Sustainable Development: The Role of Industrial Engineering, DIMEG Università di Bari, 2009.
- Tatomir, B.; Rothkrantz, L.J.; Suson, A.C. Travel time prediction for dynamic routing using ant based control. In Proceedings of the 2009 Winter Simulation Conference (WSC), Austin, TX, USA, 13–16 December 2009.
- Yao, J.; Lin, C.; Xie, X.; Wang, A.J.; Hung, C.C. Path planning for virtual human motion using improved A* star algorithm. In Proceedings of the 2010 Seventh International Conference on Information Technology: New Generations, Las Vegas, NV, USA, 12–14 April 2010.
- Cheeneebash, J.; Nadal, C. Using Tabu Search Heuristics in Solving the Vehicle Routing Problem with Time Windows: Application to a Mauritian Firm. Univ. Maurit. Res. J. 2010, 16, 448–471.
- Yu, B.; Yang, Z.Z. An ant colony optimization model: The period vehicle routing problem with time windows. Transp. Res. Part Logist. Transp. Rev. 2011, 47, 166–181.
- Jia, H.; Li, Y.; Dong, B.; Ya, H. An improved tabu search approach to vehicle routing problem. Procedia-Soc. Behav. Sci. 2013, 96, 1208–1217.
- Billhardt, H.; Fernández, A.; Lemus, L.; Lujak, M.; Osman, N.; Ossowski, S.; Sierra, C. Dynamic coordination in fleet management systems: Toward smart cyber fleets. IEEE Intell. Syst. 2014, 29, 70–76.
- Anagnostopoulos, T.; Kolomvatsos, K.; Anagnostopoulos, C.; Zaslavsky, A.; Hadjiefthymiades, S. Assessing dynamic models for high priority waste collection in smart cities. J. Syst. Softw. 2015, 110, 178–192.
- Abousleiman, R.; Rawashdeh, O. A Bellman-Ford approach to energy efficient routing of electric vehicles. In Proceedings of the 2015 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 14–17 June 2015.
- Natale, E.; Tufo, M.; Salvi, A. A fleet management service for smart cities: The S 2-move project. In Proceedings of the 2016 IEEE International Smart Cities Conference (ISC2), Trento, Italy, 12–15 September 2016.
- Rivera, J.C.; Afsar, H.M.; Prins, C. Mathematical formulations and exact algorithm for the multitrip cumulative capacitated single-vehicle routing problem. Eur. J. Oper. Res. 2016, 249, 93–104.
- Hendawi, A.M.; Rustum, A.; Ahmadain, A.A.; Hazel, D.; Teredesai, A.; Oliver, D.; Ali, M.; Stankovic, J.A. Smart Personalized Routing for Smart Cities. In Proceedings of the 2017 IEEE 33rd International Conference on Data Engineering (ICDE), San Diego, CA, USA, 19–22 April 2017; pp. 1295–1306.
- Qiu, M.; Fu, Z.; Eglese, R.; Tang, Q. A Tabu Search algorithm for the vehicle routing problem with discrete split deliveries and pickups. Comput. Oper. Res. 2018, 100, 102–116.
- Adnan, S.; Abdulmuhsin, W. The multi-point delivery problem: Shortest Path Algorithm for Real Roads Network using Dijkstra. J. Phys. Conf. Ser. 2020, 1530, 012040.
- Rout, R.R.; Vemireddy, S.; Raul, S.K.; Somayajulu, D.V. Fuzzy logic-based emergency vehicle routing: An IoT system development for smart city applications. Comput. Electr. Eng. 2020, 88, 106839.
- Akbarpour, N.; Salehi-Amiri, A.; Hajiaghaei-Keshteli, M.; Oliva, D. An innovative waste management system in a smart city under stochastic optimization using vehicle routing problem. Soft Comput. 2021, 25, 6707–6727.
- Nagarajan, S.M.; Deverajan, G.G.; Chatterjee, P.; Alnumay, W.; Muthukumaran, V. Integration of IoT based routing process for food supply chain management in sustainable smart cities. Sustain. Cities Soc. 2022, 76, 103448.
- Lu, H.; Zhang, X.; Yang, S. A learning-based iterative method for solving vehicle routing problems. In Proceedings of the International Conference on Learning Representations, New Orleans, LA, USA, 6–9 May 2019.
- Cooray, P.L.; Rupasinghe, T.D. Machine learning-based parameter tuned genetic algorithm for energy minimizing vehicle routing problem. J. Ind. Eng. 2017, 2017, 3019523.
- Moussa, H. Using recursive KMeans and Dijkstra algorithm to solve CVRP. arXiv 2021, arXiv:2102.00567.