Power hardware-in-the-loop (PHIL) stands out as a strong testing solution, enabling a real-time simulated power system to be interfaced to hardware devices such as inverters to determine interactions between multiple inverters at multiple points of common coupling on the grid and microgrids.
- power hardware-in-the-loop (PHIL)
- smart grid testbed
- microgrid testbed
1. Hardware-in-the-Loop (HIL), CHIL and PHIL in Power System Applications
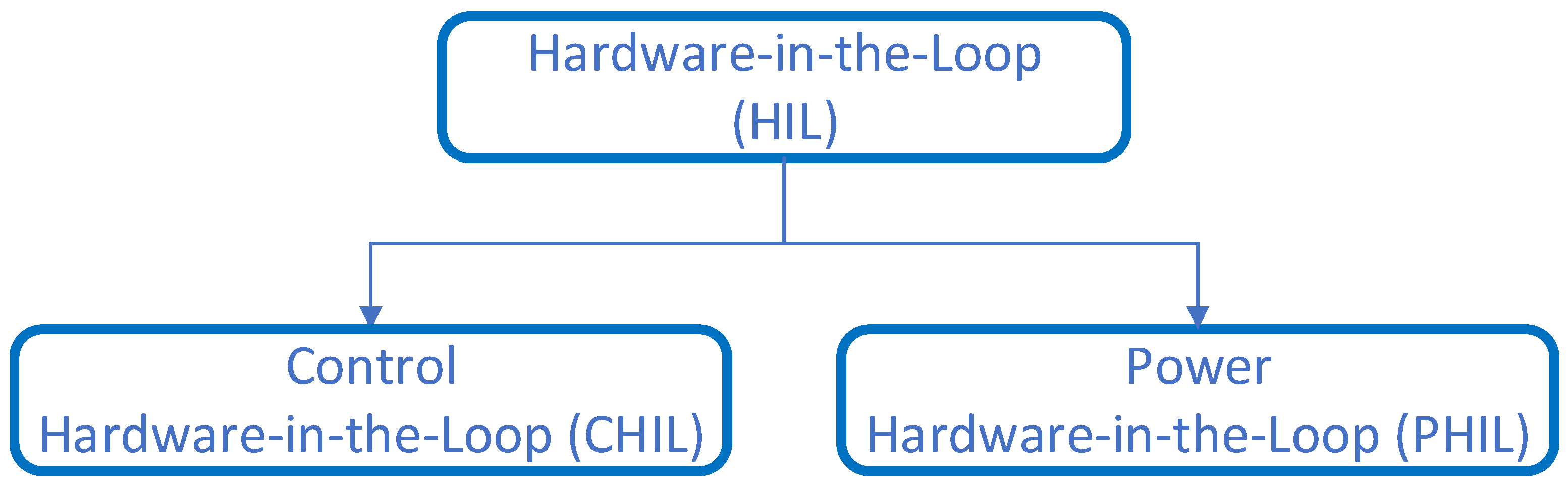
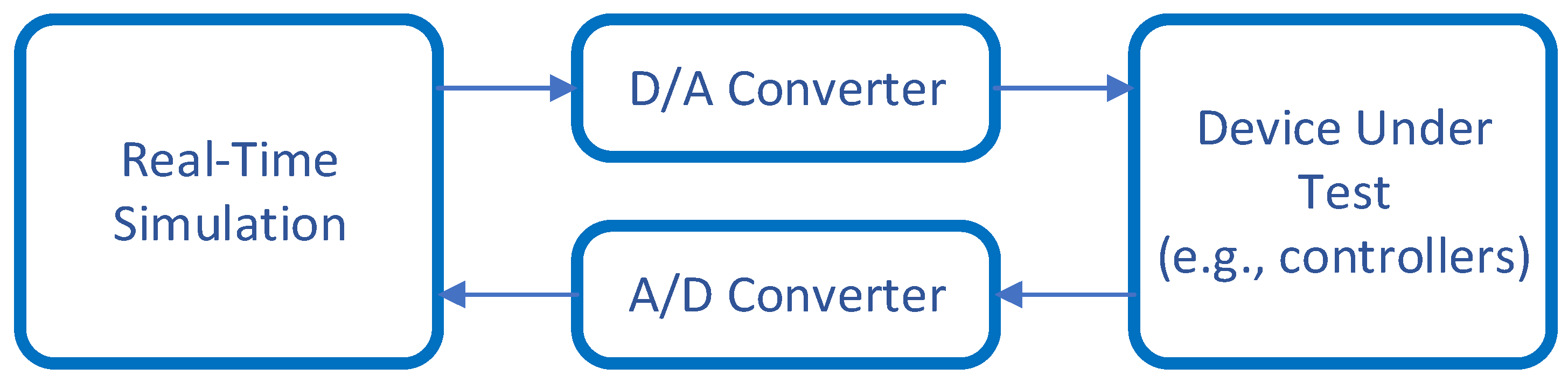
1.1. Control Hardware-in-the-Loop (CHIL)
1.2. Power Hardware-in-the-Loop (PHIL)
2. PHIL Research Paradigm Considerations to Advance Smart Inverter-Based Grid-Edge Solutions
Considering the strengths of PHIL systems presented in this paper, including accuracy, versatility and flexibility, an increase in the demand for PHIL testing is foreseen in energy systems laboratories around the world to address the need for innovations in multiple areas of the smart grid. However, there are no clearly superior PHIL platform engineering solutions yet established to perform all the needed testing applications. For this reason, and considering the costs involved in PHIL, the greatest associated with the RTS and the power amplifier, laboratories need to develop clear objectives for their testing programs to determine the best solutions. This section is intended to help guide researchers with the objectives of developing versatile PHIL platforms for advancing smart inverters to enable more DERs and connected energy devices at the grid-edge while improving grid reliability, stability, resilience and security. In view of the variety of PHIL component vendors and possible configurations, the authors suggest researchers develop specifications and requirements to share with prospective vendors including the scope of the planned and future testing, information about the testing and DUTs, description of the planned testing and the overall PHIL requirements. Section Section 33 included example RTS vendors and power amplifier vendors. Again, considering these are the primary cost and driving components, it would be prudent to share the specifications and requirements with the appropriate vendors. Based on the vendor responses regarding how they propose to contribute to the planned PHIL system, including component quotes, researchers can move forward to make the best engineering decisions regarding their PHIL system. For the essential advancement of smart inverters for optimized integration of DERs the authors propose a specialized and versatile PHIL testbed design as shown in Figure 4 to enable the interoperability testing of multiple inverters (communicating with each other and the grid), emulating the integration and interaction of a combination of DERs, i.e., PV, battery energy storage and EVs, including both grid-following and grid-forming inverters. For grid-following inverters, an amplifier operating as a voltage source would be employed and smart functions could be optimized such as volt-VAR for voltage regulation, frequency-watt for frequency regulation, and constant power factor where the inverter is required to operate at a fixed PF or range of leading to lagging such that when the active power changes, the inverter will vary the reactive power output to ensure that the target PF is met [11]. Grid-forming inverters are a strong solution for microgrid islanded scenarios where power needs to be supplied while regulating voltage and frequency [11][12], and further PHIL testing is needing for advancement. For example, in a 100% inverter-based system, grid-forming inverters are needed to set the grid voltage and frequency [12]. For grid-forming inverters a current-source amplifier would be appropriate. Thus, amplifiers capable of operating as both a controlled voltage source and as a controlled current source as shown in Figure 4 would provide extended capability at an overall reduced cost, and thus would be included in the desired specifications.
Considering that control systems in power electronic inverters introduce faster dynamics than conventional (slower) control systems [11], they can rapidly increase/decrease output to provide fast frequency response reducing the amount of inertia needed to slow a drop in frequency, e.g., due to a sudden loss of generation. This could be particularly beneficial in islanded power systems with frequency issues where the inverter control can react faster and avoid load shedding [11]. Conversely, fast dynamics may cause issues that need to be addressed. For example, electromagnetic transients can cause instability in inverter-based power systems [11], or controller interactions can cause instabilities like resonant frequencies or harmonics in the system. In order to mitigate these issues, an increased understanding of grid-connected inverter operation, control strategies and planning, sizing and location are needed for future power system stability where the key to a stable grid is consistent voltage and frequency.
The Universal Interoperability for Grid-forming Inverters (UNIFI) Consortium was launched in 2022, including multiple universities, national labs and industry members, to advance grid-forming inverters and identify challenges, where microgrids are seen as pilots for these new technologies [13]. PHIL testbeds would be strong solutions for these pilots where the interoperability of the inverters and the system can be fully researched according to grid codes and standards in addition to black-start capabilities. It is important to note that microinverters, typically dedicated to 1–4 solar modules, are also developing grid-forming capabilities and thus are important to consider in the proposed smart inverter research specifications. The PHIL testbed could include multiple lower power amplifiers with varying power capability, e.g., for microinverter and aggregation testing. Along these lines, a better understanding of how PV inverters and energy storage systems will behave in each electric grid is greatly needed [14], which is another strategic research thrust for PHIL platforms. EV fast charging impacts on grid and microgrids can also be researched including the use of local generation such as PV to support the grid. The proposed PHIL would also enable the ability to test the balanced and unbalanced fault ride-through characteristics of DUTs under simulated grid conditions. Application-specific power amplifiers can be configured to operate in either AC or DC mode. Amplifiers exhibiting AC or DC operation options provide extended capability for various PHIL applications and are thus recommended for the specification. Four quadrant amplifiers are also recommended due to the importance of closed-loop capabilities, enabling the DUT to also influence the simulation, and since the DUT may be absorbing or supplying power at different times during the test a 4Q amplifier is needed that can both source and sink power accordingly. Non-linear switched amplifiers are recommended due to their higher efficiencies and power densities and that they can be more easily connected in higher power applications. The recent innovation of fiber optic interfaces to eliminate the need for conventional I/O is another consideration for the specifications. The inverter-based PHIL testbed will enable the evaluation of: microgrid control strategies, communication networks, interactions between loads and between grid-edge devices and the grid, behavior in adverse conditions, simulation models including synthetic models, all leading to advanced visualization techniques. A lab-scale microgrid could be considered or simulating a microgrid network on the RTS with a tie to a vendor microgrid controller. The testbed can further represent the present state of a specific distribution system using a digital twin, or the anticipated state when added DERs, such as rooftop PV systems, battery energy storage systems, EVs, loads with smart controls, etc., are included. Transmission energy management systems (EMS) may also be run on the RTS and interfaced with downstream distribution management systems such as a distributed energy resource management systems (DERMS) and interfaced with actual DERs. This testbed would advance testing of high-performance autonomous inverter operation, where they will respond to local measurements with or without input from a remote operator and follow standard rules to fulfil their individual goals and collaborate (collaborative control) to sustain the grid. As stated in [15], most grid-tied inverters in the North American grid since 2003 have been listed under UL 1741, “Standard for Inverters, Converters, Controllers and Interconnection System Equipment for Use with Distributed Energy Resources” [15]. This UL 1741 standard was harmonized with IEEE 1547 for both grid-tied and non-grid-tied inverters, to yield a family of standards regarding performance, operation, testing, safety, and maintenance for DERs connected to the distribution grid [15]. The PHIL specification contributions could include supporting standards development for smart inverter functionalities and for analyzing the impacts of smart inverters on distribution systems. A downside to these advanced inverter communications is increased cybersecurity risk, where with every DER communicating with the grid, this greatly increases the size of the “attack surface” [16][17][18]. PHIL testbeds can provide another level of cybersecurity risk emulation by enabling research on cyber intrusions in the communication network, such as event buffer flooding [19], man-in-the-middle [20], packet sniffing and modification [21] where the power system impacts can be observed with real-time simulation [17] on both the network and the hardware. Hardware devices such as smart inverters can detect the cyber security events with pre-defined alerts and control logic [17] to ensure the risk is minimized as inverters and the grid get smarter. Finally, the PHIL platform can enhance multiple cost-benefit analyses and case studies.References
- Opal-RT Technologies. Available online: https://www.opal-rt.com (accessed on 26 November 2022).
- RTDS Technologies. Available online: https://www.rtds.com (accessed on 26 November 2022).
- Hubschneider, S.; Kochanneck, S.; Bohnet, B.; Suriyah, M.; Mauser, I.; Leibfried, T.; Schmeck, H.; Braun, M. Requirements for Power Hardware-in-the-Loop Emulation of Distribution Grid Challenges. In Proceedings of the 2018 53rd International Universities Power Engineering Conference (UPEC), Glasgow, UK, 4–7 September 2018; pp. 1–6.
- Bethany, S.; Dheepak, K.; Annabelle, P.; Mark, R.; Hongyu, W. Hardware-in-the-Loop (HIL) Simulations for Smart Grid Impact Studies. In Proceedings of the IEEE PES General Meeting, Portland, OR, USA, 5–9 August 2018.
- Pratt, A.; Baggu, M.; Ding, F.; Veda, S.; Mendoza, I.; Lightner, E. A Test Bed to Evaluate Advanced Distribution Management Systems for Modern Power Systems. In Proceedings of the IEEE EUROCON 2019—18th International Conference on Smart Technologies, Novi Sad, Serbia, 1–4 July 2019; pp. 1–6.
- Barragán-Villarejo, M.; García-López, F.D.P.; Marano-Marcolini, A.; Maza-Ortega, J.M. Power System Hardware in the Loop (PSHIL): A Holistic Testing Approach for Smart Grid Technologies. Energies 2020, 13, 3858.
- Collin, R.; Stephens, M.; Von Jouanne, A. Development of SiC-Based Motor Drive Using Typhoon HIL 402 as System-Level Controller. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Detroit, Michigan, 11–15 October 2020.
- Li, C.; Von Jouanne, A.; Oriti, G.; Julian, A.; Agamloh, E.; Yokochi, A. GaN Four-leg Inverter Implementing Novel Common Mode Elimination using a Hardware-in-the-loop System-Level Controller. In Proceedings of the 2022 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, Michigan, 9–13 October 2022.
- Lundstrom, B.; Chakraborty, S.; Lauss, G.; Brundlinger, R.; Conklin, R. Evaluation of System-Integrated Smart Grid Devices using Software and Hardware-in-the-Loop. In Proceedings of the 2016 IEEE Innovative Smart Grid Technologies Conference (ISGT), Minneapolis, MN, USA, 6–9 September 2016.
- Prabakar, K.; Palmintier, B.; Pratt, A.; Hariri, A.; Mendoza, I.; Baggu, M. Improving the Performance of Integrated Power-Hardware-in-the-Loop and Quasi-Static Time-Series Simulations. IEEE Trans. Ind. Electron. 2021, 68, 10938–10948.
- Hernandez-Alvidrez, J.; Gurule, N.S.; Reno, M.J.; Flicker, J.D.; Summers, A.; Ellis, A. Method to Interface Grid-Forming Inverters into Power Hardware in the Loop Setups. In Proceedings of the 2020 47th IEEE Photovoltaic Specialists Conference (PVSC), Calgary, ON, Canada, 15 June–21 August 2020; pp. 1804–1810.
- Quedan, A.; Wang, W.; Ramasubramanian, D.; Farantatos, E.; Asgarpoor, S. Behavior of a High Inverter-Based Resources Distribution Network with Different Participation Ratios of Grid-Forming and Grid-Following Inverters. In Proceedings of the 2021 North American Power Symposium (NAPS), College Station, TX, USA, 14–16 November 2021; pp. 1–6.
- Lin, Y.; Eto, J.H.; Johnson, B.B.; Flicker, J.D.; Lasseter, R.H.; Pico, H.V.; Ellis, A. Research Roadmap on Grid-Forming Inverters. Golden, CO: National Renewable Energy Laboratory. NREL/TP-5D00-73476; 2020. Available online: https://www.nrel.gov/docs/fy21osti/73 (accessed on 26 November 2022).
- García-Martínez, E.; Sanz, J.F.; Muñoz-Cruzado, J.; Perié, J.M. A Review of PHIL Testing for Smart Grids—Selection Guide, Classification and Online Database Analysis. Electronics 2020, 9, 382.
- Horowitz, K.A.; Peterson, Z.; Coddington, M.H.; Ding, F.; Sigrin, B.O.; Saleem, D.; Baldwin, S.E.; Lydic, B.; Stanfield, S.C.; Enbar, N.; et al. An Overview of Distributed Energy Resource (DER) Interconnection: Current Practices and Emerging Solutions. Golden, CO: National Renewable Energy Laboratory. NREL/TP-6A20-72102; 2019. Available online: https://www.nrel.gov/docs/fy19osti/72102.pdf (accessed on 26 November 2022).
- Choi, J.; Narayanasamy, D.; Ahn, B.; Ahmad, S.; Zeng, J.; Kim, T. A Real-Time Hardware-in-the-Loop (HIL) Cybersecurity Testbed for Power Electronics Devices and Systems in Cyber-Physical Environments. In Proceedings of the 2021 IEEE 12th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Chicago, IL, USA, 28 June–1 July 2021; pp. 1–5.
- Hao Huang, C.M.D.; Davis, K.R. Real-time Power System Simulation with Hardware Devices through DNP3 in Cyber-Physical Testbed. In Proceedings of the 2021 IEEE Texas Power and Energy Conference (TPEC), College Station, TX, USA, 2–5 February 2021; pp. 1–6.
- Zhou, Z.; Yang, H.; Li, H.; Zhang, J.; Li, S.; Gao, X.; Gong, P. A Dynamic Cyber-attack Approach for Real-time Hardware-in-the-loop Simulation of Power Grid. In Proceedings of the 2022 24th International Conference on Advanced Communication Technology (ICACT), Pyeongchang, Repulic of Korea, 13–16 February 2022; pp. 212–217.
- Jin, D.; Nicol, D.M.; Yan, G. An event buffer flooding attack in dnp3 controlled scada systems. In Proceedings of the 2011 Winter Simulation Conference (WSC), Phoenix, AZ, USA, 11–14 December 2011; IEEE: New York, NY, USA, 2011; pp. 2614–2626.
- Yang, Y.; McLaughlin, K.; Littler, T.; Sezer, S.; Im, E.G.; Yao, Z.Q.; Wang, H.F. Man-in-the-middle attack test-bed investigating cyber-security vulnerabilities in Smart Grid SCADA systems. In Proceedings of the International Conference on Sustainable Power Generation and Supply (SUPERGEN 2012), Hangzhou, China, 8–9 September 2012; pp. 1–8.
- Lee, D.; Kim, H.; Kim, K.; Yoo, P.D. Simulated attack on dnp3 protocol in scada system. In Proceedings of the 31th Symposium on Cryptography and Information Security, Kagoshima, Japan, 21–24 January 2014; pp. 21–24.