Labor shortage and increasing labor cost are serious problems in today’s society. With the concept of Industry 5.0, it is imperative to promote industrial transformation and accelerate the automation and intelligent development of equipment in order to reduce the pressure brought by the rapid rise in labor costs, so more and more intelligent equipment is used in factories and storage environments. Nowadays, the status of logistics equipment is increasing, and forklifts, as the main force of logistics handling equipment, have been widely used in many fields, such as factories, ports, and warehouses. However, as the requirements of the operating environment continue to increase, the handling equipment can no longer be operated by human hands, especially in special environments, such as high temperature, and hazardous and explosive environments. Along with the development of driverless technology, forklifts are also slowly approaching advanced technologies, such as intelligent identification, wireless transmission, and autonomous navigation and positioning. Intelligent forklifts can enhance the compound ability of forklifts, improve the overall operation level of forklifts, and gradually add more added value. Therefore, intelligent forklifts are the main development direction of forklifts in the future.
1. Introduction
The operation of an intelligent forklift is quite straightforward; typically, it inserts and picks up pallets at one preset area before travelling to another to dump them off, accomplishing a full pallet transfer procedure. However, implementing such a straightforward approach presents numerous specific difficulties:
-
Existing methods are more costly for determining whether a pallet is available at a certain location, while the recognition rate is low and also susceptible to interference by environmental factors
[1][4].
-
When the intelligent forklift inserts the pallet, there are problems of high implementation cost
[2][5], low algorithm robustness and insufficient accuracy for the calculation of the relative position between the pallet and the forklift.
-
When controlling the intelligent forklift to insert the pallet after the accurate position is calculated, a fixed control amount is usually used without considering the vehicle running state, which makes the control process deviate and eventually leads to errors in the inserting results
[3][6].
ThWe researchers propose a deep learning-based intelligent forklift accurate cargo transfer system to address the aforementioned issues, as well as to increase the resilience and accuracy of the system. The system consists of various components with various sensors that cooperate to finish the pallet transfer operation. The researchers sWe specifically use RGB surveillance cameras to check whether there is any pallet that need to be transported at the pallet storage location. Once the researchers we determine that there are pallets, the researchers sewe send intelligent forklifts to the area. The researchers We then use the RGB-D (depth) camera that comes with the intelligent forklift to calculate the precise position of the pallets relative to the forklift. Finally, the researchers we use a high-precision control algorithm to control the forklift. The following three aspects make up the majority of the system features:
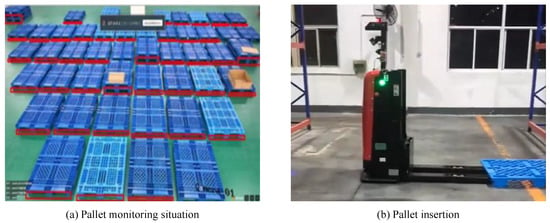
In the ouresearchers' warehouse, theywe employ cameras to monitor pallets and intelligent forklifts to insert and remove pallets, as shown in Figure 1.
Figure 1. System operation diagram. ThWe researchers hhave constructed the entire system that is detailed in this researchpaper in the warehouse. One of the eight cameras in the pallet monitoring system, which can monitor the presence of pallets in the storage area and mark them with red boxes when they are found, is illustrated in (a). The intelligent forklift arrives at point (b), determines the location of the pallets, and then executes the insertion and extraction procedure depicted in the figure after realizing that the pallets need to be moved.
2. PRelallet Monitoring, Pallet Position Recognition, and Intelligent Forklift Controlted Works and Background
In this section, thwe researchers discuss the work related to pallet monitoring, pallet position recognition, and intelligent forklift control.
2.1. Pallet Monitoring
When intelligent forklifts are first put into use, it is usually the human who determines whether there are pallets to be inserted and picked up at a specific point. Workers usually hold devices, such as tablet computers or pagers, and send commands to the intelligent forklifts to insert and pick up pallets. However, this approach necessitates human involvement, which wastes labor and is ineffective.
In some projects, the use of sensor-assisted automatic identification techniques has begun
[6][9]. In such projects, sensors are typically installed at pallet storage locations to detect the presence or absence of pallets
[7][10], and the results are then transmitted to the dispatching system via a network cable so that the intelligent forklifts can determine whether a pallet needs to be moved at a specific location. However, using this approach in a large-scale storage environment requires the deployment of sensors at each pallet storage location, which greatly increases the difficulty and cost of implementation.
Recent studies have looked into using RGB surveillance cameras to detect the presence or absence of pallets
[8][11]. This recognition is typically based on the conventional image recognition scheme, which assumes that the appearance of the pallet is mostly visible and clearly distinguished from its surroundings, and then extracts the pallet from the image using techniques such as image segmentation, template matching, etc. This method does not account for the fact that a pallet may have goods covering all or nearly all of its surface, which makes it easy to mistake a pallet for nothing because the camera cannot gather enough data on the pallet’s color and contours.
In 2021, Joo et al. proposed a Yolov3-based pallet recognition method
[9][12] which is designed for the industry and can recognize pallets more steadily than conventional image recognition techniques. However, the technique necessitates that the camera be placed in close proximity to the pallet in order to collect data. One camera cannot effectively monitor a large area of pallets, and the recognition rate is low for pallets with a small pixel share.
2.2. Pallet Position Recognition
Pallet position recognition relative to forklift has always been an industry challenge. The pallet must frequently be placed manually or mechanically at the exact location (error less than 1 cm) on the shelf during the initial stages of unmanned forklift use. The intelligent forklift only needs to get to the fixed position each time to finish inserting and retrieving the pallet in this situation because the position of the pallet and the shelf is essentially fixed. This method is not suitable for the automated operation of the plant because it requires too much accuracy in pallet placement, and if there is a mistake, it is easy to happen that the forklift cannot insert the pallet and needs manual assistance.
A technique for using auxiliary markers, such as QR codes, for position recognition has surfaced in the industry as a solution to such issues
[10][13]. The pallets are marked with additional markers, and an on-board scanning gun is used to find the markers. Because it can calculate the position of the pallet in relation to the forklift based on the location of the QR code while entering the pallet information, it has been widely used in the industry. However,
thwe
researchers prefer a method that identifies pallets based on their own shape, texture, and other information rather than methods that require markings to be posted on each pallet, which requires a lot of work in the pre-deployment stage.
Garibotto et al.
[11][12][14,15] proposed a vision-based algorithm to detect the central hole of a pallet, where the hole features of the pallet are extracted after a pre-segmentation of the image, and then the geometric model of the pallet is projected onto the image plane for position estimation. However, the traditional image approach used by this method to identify the position of the pallet hole makes it more susceptible to interference. This is especially true if the shape of the portion of the goods above the pallet is similar to the shape of the hole position, which is typically a simple rectangle.
2.3. Forklift Precision Control Algorithm
The more common forklift control algorithm is based on the improvement of PID control
[13][16], and the desired control effect is achieved by adjusting different control parameters according to the actual usage. However, due to its ease of use and constrained range of adjustment, this method is difficult to adapt to complex factory or warehouse environments and frequently exhibits the trait of low control accuracy in use.
Jiang, Zhizheng et al. proposed a Robust H-based forklift control algorithm
[14][17] to model the dynamics of an electric power steering (EPS) system of an electric forklift. The standard H control model of the EPS system is transformed to derive the generalized equation of state for the EPS of an electric forklift. The principle of genetic optimized robust control is described, and the constraint function of genetic algorithm (GA) is constructed for the parameter optimization of the weighting function of the H control model, and the genetic optimized robust controller is derived. The accuracy and robustness of the forklift control process are effectively enhanced. This method, however, also only focuses on the function of EPS in forklift control and neglects to design for the actual operating circumstances during forklift operation or take into account the dynamic adjustment of the control volume to increase control accuracy.
3. Intelligent Forklift Cargo Precision Transfer System
In a factory or warehouse, intelligent forklifts are needed to accurately insert and transport pallets, as well as autonomously determine whether there is any pallet in the pallet storage area that need to be transferred.
ThWe
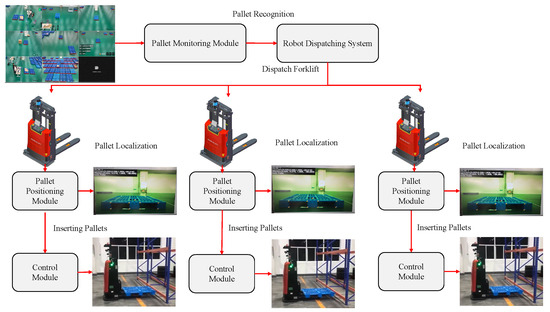
researchers introduce an intelligent forklift cargo precision transfer system to carry out this function, as depicted in
Figure 2. In order to determine whether there is any pallet that need to be transported at the pallet storage location,
thwe
researchers use a standard RGB surveillance camera. The forklift is then dispatched to the area of the pallet, and the exact position of the pallet is recognized by the RGB-D camera that comes with the forklift. Finally, according to the recognized exact position, a high-precision control algorithm is used to control the forklift to insert and pick up the pallets.
Figure 2. The overall flow of the intelligent forklift precision cargo transfer system. RGB camera captures images of the pallet storage area and transmits them to the pallet monitoring module, which identifies the pallets and informs the dispatching system. The dispatching system dispatches forklifts to insert and pick up the identified pallets. The forklift reaches the pallet and uses the pallet positioning module to identify the pallet position, and after the position is identified, it is handed over to the high precision control module to control the vehicle to insert and pick up the pallet.