Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 1 by Dimitris Mourtzis and Version 2 by Camila Xu.
The charge scheduling is facilitated by a heuristic algorithm, while the charging station selection mechanism is facilitated by the analytic hierarchy process (AHP).
- analytic hierarchy process
- AHP
- charge scheduling
- decision-making
- electric vehicle
1. Introduction
Subjects related to electric vehicles (EVs) have gained the attention of both academia and industry. Ever-increasing environmental concerns have triggered research on new technologies that will make EVs an environmental-friendly alternative to conventional vehicles [1]. In addition, the integration of renewable energy sources (RES) in the electric grid enables the distributed energy production and management, following the philosophy of the smart grid [2]. Nevertheless, the introduction of EVs disrupts the operation of the power grid [3], in a similar manner to the introduction of renewable energy sources in the past. As a result, novel energy management techniques should be introduced to ensure the stability of the power grid, and transform EVs from being passive energy consumers, into being active elements of the smart grid [4]. Towards this end, the communication mechanisms between the smart grid and the EV pose a major role. Using vehicle-to-grid (V2G) communications, the coordination of the EV charging can be achieved [5].
A major concern related to the charging of EVs is the long duration of the procedure. Therefore, smart scheduling mechanisms should be employed to ensure the timely fulfilment of charging tasks, while meeting the driver’s demands and the constraints of the charging station (CS) operators, in the context of a win-win situation [6].
2. Charging Station Selection Using Analytic Hierarchy Process (AHP)
2.1. Theoretical Formulation of the AHP
After the generation of the charge schedules of the CSs through the heuristic algorithm, the decision-making support system of the EV ranks the CSs based on the priorities of the driver. The decision-making support is facilitated by the AHP. The AHP is classified as a major decision-support method, which is used in various engineering fields [7][40]. A major highlight of the method is that it allows the usage of subjective factors. Despite its broad usage, especially in the subject of decision-making in production systems [8][41], the AHP has not been sufficiently investigated in the subject of CS selection by the drivers of EVs. Nevertheless, it has been selected as dispatch mechanism for the EV charging, supporting V2G power transfer. In the context of this respapearchr, the selection of the most appropriate CS, according to the priorities of the driver, is evaluated as a multicriteria decision-making problem. The computing system of the EV retrieves the quotations of the nearby CSs via the OPC–UA and evaluates them based on the quality of services that they provide. The needs of the driver are determined based on their transportation schedule, which can be obtained by integrating the related web services and mobile applications. Moreover, the state-of-charge of the battery stack and the requested energy to accomplish the upcoming transportation tasks can be determined by the Battery Management System (BMS). The criteria for the decision-making algorithm are introduced in Equations (12)–(415), and they can be modified to satisfy needs that may emerge. Those criteria refer to the cost of the EV charging, the degradation of the batteries, and the timely completion of the charging task. where,-
Pricecriterion: The criterion that corresponds to the satisfaction of the charging cost requirements of the EV driver.
-
PreferredPrice: The reference price for the evaluation. It can be calculated using the average EV charging price of a region.
- PreferredChargeDuration
- : The preferred duration of the charging task based on the schedule of the driver.
- ChargeDuration
- : The charge duration following the charge schedule of the station.
-
TravelTime: The time that is required for transportation to the station.
-
X'
-
X: the value of the criterion as a result of Equations (12
Table 14.
The pairwise comparisons considering three criteria/alternatives.
| Criteria/Alternatives | Priority Vector | ||
|---|---|---|---|
- )–(
- 415).
| Criteria/Alternatives | C11 | C12 | C13 | geomean(C11, C12, C13)sum(C11, C12, C13) |
| C21 | C22 | C23 | geomean(C21, C22 C33)sum(C31, C32, C33) |
To allow for reproducible results, the variation of the AHP presented in [11][42] is followed. The preferences of the drivers are depicted in the criteria judgment matrix. The judgment matrix referring to the alternatives is created from the charging parameters that are sent by the CSs. The pairwise comparisons are performed by dividing the values for each criterion that correspond to each of the two stations that are compared. The priorities of the criteria and the alternatives are calculated by the right principal eigenvector. Given a judgment matrix with pairwise comparisons, the corresponding maximum eigenvector is approximated by using the geometric mean of each row. In the next step the normalisation of the eigenvectors is performed by their division with the sum of the corresponding row, hence the priority vector (PV) is formed. During the pairwise comparisons of the AHP, an aspect that requires careful handling is the consistency of the judgement matrices. In this rpapesearchr the consistency ratio is verified to have a value below 10%.
Finally, the formation of the decision matrix is performed as follows. The rows of the matrix correspond to the alternatives, while the columns refer to the criteria (Table 25). The priority vector of the criteria table depicts the weight for each criterion (first row). The priority vectors for all the alternatives under a given criterion are multiplied by the corresponding weight form the columns of the decision matrix. The final ranking of the alternatives is performed by the calculation of the weighted sum (utility value) of the rows of the decision matrix.
Table 25.
The decision matrix providing the ranking of the alternatives.
| Criteria | Final Priority | |||
|---|---|---|---|---|
| Weights | PVCrit1 | PVCrit2 | PVCrit3 | |
| Alternatives | PVCrit1 ∙ PV(A1,C1) | PVCrit2 ∙ PV(A1,C2) | PVCrit3 ∙ PV(A1,C3) | sum(row) |
| PVCrit1 ∙ PV(A2,C1) | PVCrit2 ∙ PV(A2,C2) | PVCrit3 ∙ PV(A2,C3), C23)sum(C21, C22, C23 | ||
- StationPrice
- : The charging cost that refers to a specific CS.
| ) | ||||
| sum | ( | row) | C31 | C32 |
| PVCrit1 ∙ PV(A3,C1) | PVCrit3 ∙ PV(AC33 | 3,C2) | PVCrit3 ∙ PV(A3,C3)geomean(C31, C32, | sum(row |
- AvgCurrent
- criterion
- : The first criterion related to the preservation of the battery health that refers to the average charging current.
-
EVAverageCurrent: The preferred average charging current based on the energy and completion time requirements of the driver.
-
StationAverageCurrent: The average charging current that will be offered by the charging station.
| ) |
- X
- min, Xmax: the minimum and the maximum values of the criterion (ymax = 9, ymin
- AggressiveChrg
- criterion
- : The second criterion related to the preservation of the battery health that refers to the maximum charging current.
- = 1).StationMaximumCurrent: The maximum charging current that will be offered by the charging station.
-
ComplTimecriterion: The criterion that corresponds to the timely completion of the charging task.
2.2. Flowchart for the Quantification of the Priorities of the Driver
A major advantage of the proposed method is its potential for real-life application. Towards this end, a concern is the approach that will be followed for the quantification of the preferences of the driver. The operation of the AHP is based on Saaty’s fundamental scale for the pairwise comparisons [11][42]. Saaty’s scale quantifies the intensity of importance between two alternatives or criteria using the distinct levels of “Equal Importance”, “Moderate Importance”, “Strong Importance”, “Very Strong Importance”, and “Extreme Importance”. In order to make this procedure intuitive, the flowchart of Figure 14 is proposed to be employed in a commercial software implementation of the proposed method. The driver should be prompted to import the charging priorities in linguistic form, following Saaty’s scale. Afterwards, the consistency ratio (CR) is calculated. If the value of the CR is above 10%, the priorities of the driver are inconsistent, and the procedure should be reinitiated.
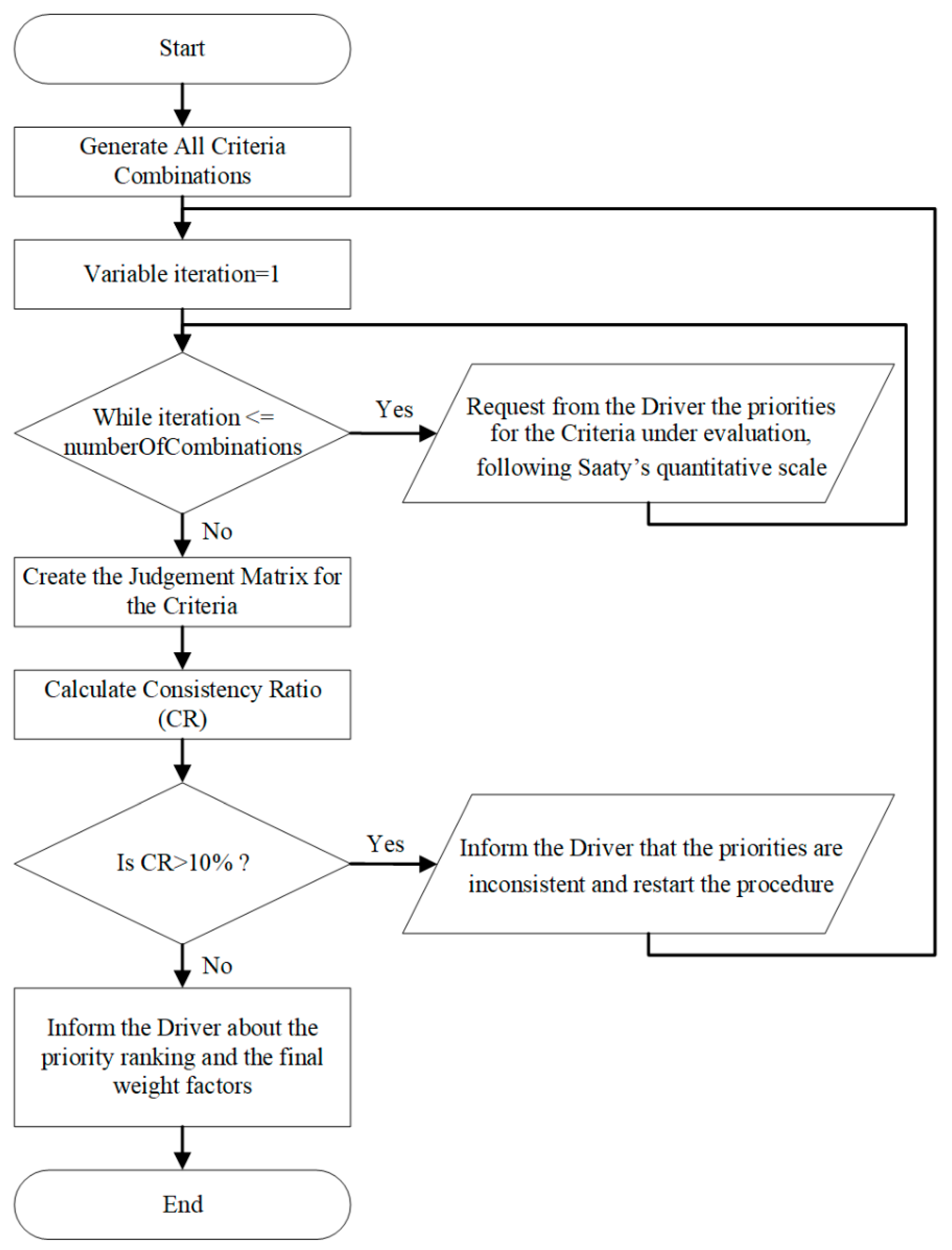
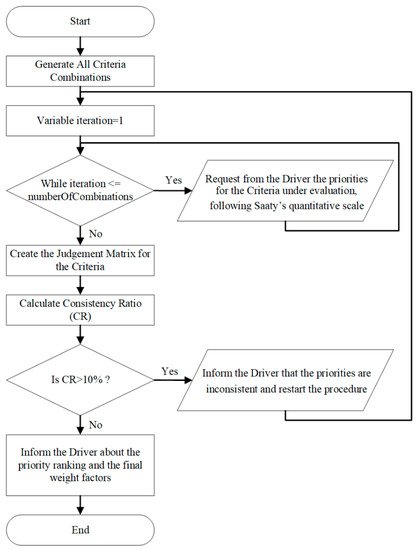
Figure 14. The flowchart for the quantification of the driver’s priorities.
The flowchart for the quantification of the driver’s priorities.