Identifying the factors that control the dynamics of pedestrians is a crucial step towards modeling and building various pedestrian-oriented simulation systems. Several approaches have been proposed by researchers to predict pedestrians’ movement characteristics using different methods and techniques.
Based solely on experimental evidence, rein thisearchers work, we isolate the factors that influence the interactions between pedestrians in single-file movement. Wi
Furthermore, artificial neural networks, one can approximate the fitting function that dclassical pedestrian interaction models are anisotropic, assuming that people in front influence the dynamics more than people behind.
We obscribes pedestrians’ movement without having modeling bias. The analysierve that the distance behind in single-file motion plays a role in the dynamic.
These is focused on the distances and range of inresults suggest that the follower headway ($DF$) is a potential influential factor that significantly improves the prediction of pedestrian speed.
Yet, theractions across neighboring correlation we observe may be the consequence of an anisotropic mechanism.
Such an assumpedestriantion should be tested using isotropic and anisotropic models.
1. Introduction
For the sake of safe mass events, comfortable and efficient transport infrastructures, for example, airports, much work is dedicated to understanding the laws governing crowd dynamics. In recent years, the number of empirical studies increased significantly, which led to more insights into the movement of people. Additionally, these insights often offer useful criteria that validate models and evaluate the simulacrum of reality they create.
Trustworthy models are valuable tools that shed light on unknown aspects of crowds and allow for assessing and investigating new design and planning measures. There are sHoweveral approaches to, most known model pedestrian dynamics, as will be discussed in the following sections.
Theing approaches make implicit assumptions fo
cus here is to apply feed-forward neural networks (FFNN) to investigate and empirically analyze the impact of din the way people move and interact with their environment. Cellular automata, for instance
interaction range on the dynamics of , assume that a pedestrians
without modeling bias. Unlike most current research,’ motile behavior is determined by chemotaxis [1]. Anothe
aim is to analyze single-file movement inr popular modeling ansatz describes the crowd by different
homogeneous and heterogeneous gender flowsial equations, assuming constructed functions such as algebraic [2] to
predicr exponential [3] Newt
onian the pedestrian’s speed.forces compactly describe a system’s Figure 1 be
vol
ow showsution. It is worth noting that in [4], the
minte
thodology followed in developing the algorithms for speed prediction using FFNNraction energy between pedestrians was measured from field observations and not assumed.
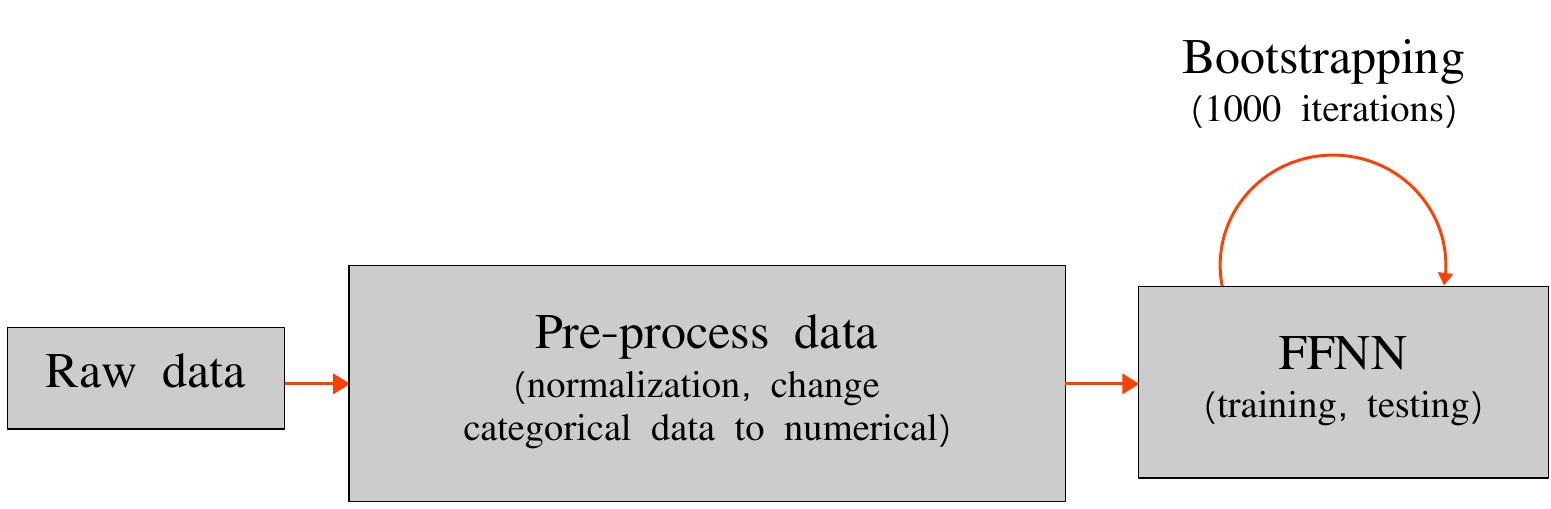 Figure 1. The methodology followed in developing the algorithms for speed prediction. In the pre-processing step, researchers change the categorical to numerical values and normalize the data between [0, 1] to have the same scale of values (an important step before training for artificial neural networks).
Figure 1. The methodology followed in developing the algorithms for speed prediction. In the pre-processing step, researchers change the categorical to numerical values and normalize the data between [0, 1] to have the same scale of values (an important step before training for artificial neural networks).
2. Approaches to MoPredelict Pedestrian Dynamics
2.1. Physics-based approaches
MRecently, more attention has been given to studying the influential factors that control the dynamics of pedestrians in closed and open environments
[1][2][3][4][5][6][8,9,10,11,12,13]. Understanding such factors can help in modeling complex pedestrian movement. When dealing with complex systems, such as pedestrian dynamics, scientists generate numerous models based on different approaches, variables, and parameters
[7][14]. For instance, force-based models (see
[15] [8] for a review) assume that pedestrians’ deviation from their intended trajectories can be explained by external forces. Another ansatz by Karamouzas et al.
[9] [4] follows a statistical–mechanical approach to measure the interaction energy between pedestrians based on the time to a potential future collision (time-to-collision). Tordeux et al.
[10] [16] introduce the walking time-gap as a parameter to model pedestrian movement. Van den Berg et al.
[11] [17] propose a model based on optimal collision-avoidance techniques to describe the movement of pedestrians in two-dimensional space. Another model, the Linear Trajectory Avoidance (LTA) model, introduced by Pellegrini et al.
[12][18], takes into account both simple scene information in the form of destinations or desired directions and interactions between different pedestrians. Cellular automaton model proposed by Schadschneider et al.
[13] [1] is inspired by the chemotaxis process, which ants use for communication. This discrete on-space model assumes that pedestrian transition to neighbor cell probability varies dynamically and is not constant. Thus, this model modifies the transition probabilities by considering the nearest-neighbor interactions to determine pedestrian
’s
’ transition to the next state.
The aforementioned classical models are anisotropic, i.e., they assume that pedestrians interact with people in their vision field, and this interaction is reduced with the people behind. For instance, most force-based models include a vision field affecting a weight depending on the bearing angle θij [2,3,5,6]. In the centrifugal and generalized centrifugal force model [2,6], the weight is
2.2 Data-based approaches
In the original social force model [3], the weight is
where φ is the angle of sight, and 0<c<1 is a reduced perception factor. Extended social force models use the weight [5]
Such mechanisms make the motion behavior highly anisotropic. For single-file motion, it may even induce the interaction model to be strictly anisotropic (i.e., depending solely on the distances in front). In this article, we analyze the interaction range in single-file movement, including isotropic symmetric interaction models based on the distance to pedestrians behind as well. Furthermore, all previously discussed models introduce equations that provide a template for a large but tightly linked family of models. However, sometimes the choice of certain qualitative functions is not justified, nor is it backed by empirical knowledge of pedestrian dynamics. Moreover, classical models have a bias that emerges from their form, which has restricted degrees of freedom. That means each model can be controlled by a few specific parameters inherent to the form of the model. The prediction quality usually depends on the pertinence of the model’s form defined to describe pedestrians’ movements.
Recently, many researchers have proposed human trajectory prediction algorithms
[14][19], arguing that neural networks have high flexibility and are devoid of any modeling bias. For example, Alahi et al.
[15] [13] develop the Social LSTM (S-LSTM) algorithm to predict the future trajectories of pedestrians depending on their past positions and the interactions with their neighbors. To model the social interaction, Alahi uses a social-pooling layer to allow sharing
of each neighboring pedestrian’s LSTM hidden state to predict the subject pedestrian’s future positions. The Alahi et al. algorithm improved the prediction of the next position by a
factor of approximately 21% compared to the force-based model (SF)
[16][3]. Xue et al.
[17][20] develop
ed a trajectory-prediction algorithm, called the Bi-prediction algorithm, based on the S-LSTM and considering the importance of pedestrians’ intended destinations in predicting their future trajectories. This two-stage prediction model employs bidirectional LSTM architecture to forecast multiple possible trajectories with different probabilities in the scene. In other research
[18][21], the authors propose the MX-LSTM model, which adds to the previous models a new variable (direction of the pedestrian head) to improve the trajectory predictions (the model improves the prediction by approximately 19% compared to the SF classical model). All the aforementioned data-based approaches have been used to describe low-density situations using specific datasets (UCY
[19][22], ETH
[12][18], etc.) where social interaction
s techniques for collision avoidance take up to several meters.
AOther researchers have focused on developing algorithms based on artificial neural networks to predict a pedestrian’s speed. For instance, the study proposed by Tordeux et al.
[17][7] applies feed-forward neural networks (FFNN) to predict the speed of pedestrians walking on different types of facilities (corridors and bottlenecks). Several FFNNs are presented to approximate the fitting function with different
combin
ations of input features (relative positions, relative velocities, and mean distance to the nearest ten neighbors in front), hidden layers, and hidden neurons. The results of FFNN show
an improvement
of by 20% compared to the classical approach (Weidmann fitting model
[20][23]) evaluated with mixed data (corridor and bottleneck). In another study by Tkachuk et al.
[18][24], the authors develop a system that simulates pedestrians’ behavior during the evacuation process. The proposed system uses FFNN to predict how people act during evacuations. The acceleration and average velocity are used to predict each pedestrian’s horizontal and vertical speeds. Another study by Yi Ma et al.
[19] [25] proposes an approach based on a multilayer perceptron artificial neural network for simulating pedestrians’ behavior. The authors train the artificial neural network using pedestrians’ actual movement data to encapsulate and predict their future behaviors. To verify the correctness of the proposed simulation system, the authors compared the simulation results of pedestrian counter-flow in a road-crossing situation and pedestrian collision avoidance with the actual experiments. The simulation results in both studies show that the proposed models based on artificial neural networks provide greater prediction accuracy by learning from actual experimental data rather than other models.
3. Single-file Movement Experiments
Single-file movement experiments are a simple setup that allows easily controlling of the influential factors to investigate pedestrian movement. Figure 2 below illustrates single-file experiments performed at the Arab American University in Palestine [21]:
 Figure 2. Snapshots from Palestine experiments. Left: UM experiment,N=20. Right: UX experiment, N=24.
Figure 2. Snapshots from Palestine experiments. Left: UM experiment,N=20. Right: UX experiment, N=24.
4. Results and Analysis
The research aims to investigate the influence of the follower, predecessor, and second predecessor pedestrians’ headway distances on the speed behavior of a pedestrian. The investigation examines the isotropic nature of the interaction behavior, considering that a pedestrian interacts not only with pedestrians in their field of vision to regulate the speed but also with the pedestrians behind.
Interestingly, in Figure 3 readers can see that the combination of distance with the pedestrian in front and right behind improves the speed prediction compared to the combination of headway distances in front. From observing experiments’ videos, one can notice that the pedestrians in relatively high densities start to adjust their speed when they approach the nearest neighbors to avoid colliding. This result demonstrates that the interaction behavior is not strictly anisotropic in single-file movement, contrary to classical modeling approaches assuming that the front distances only influence the speed.
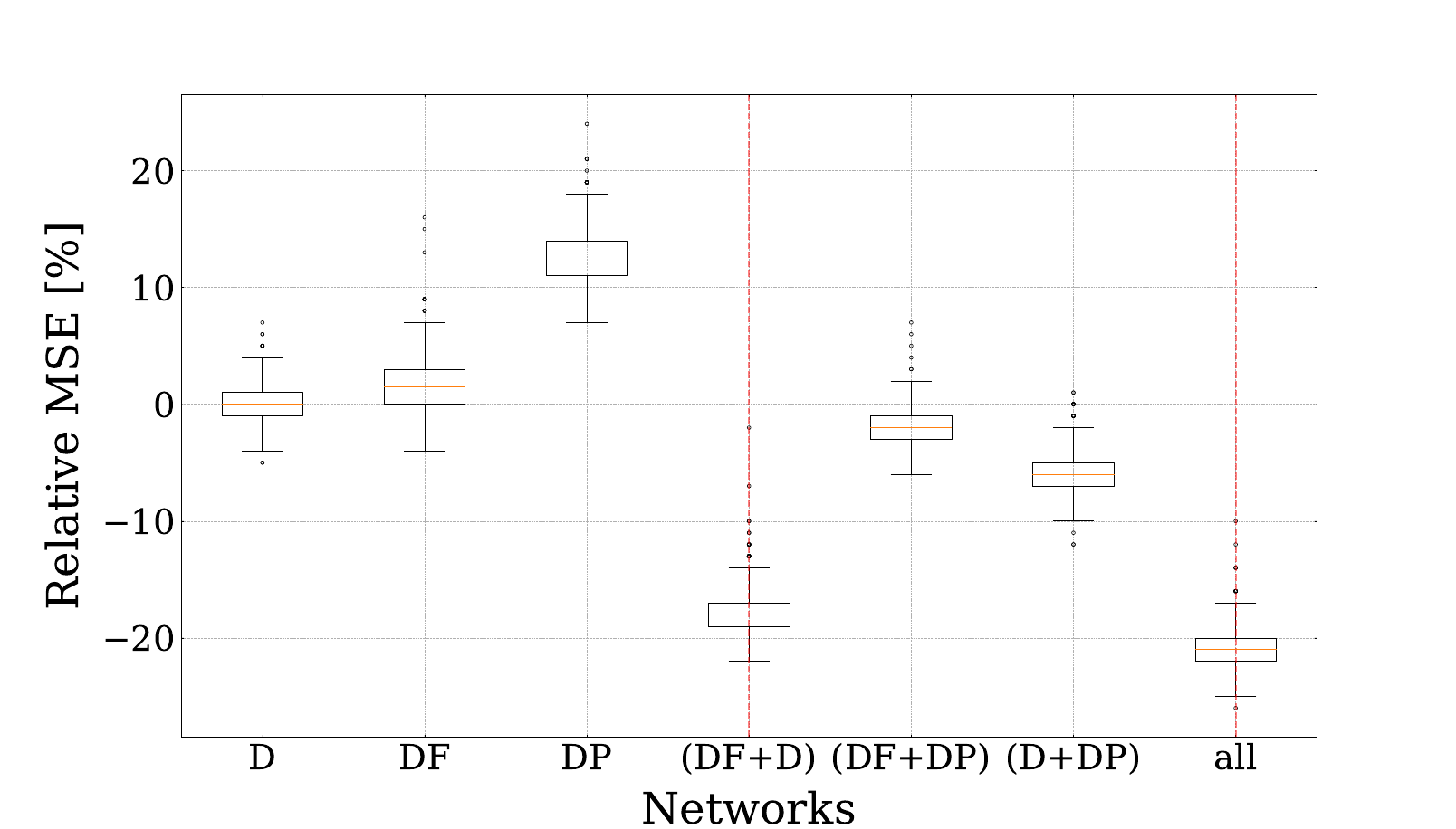 Figure 3. Boxplots represent the training MSE results of the algorithms using UX, N=20, 24, 30 samples with complexity (3,2). The x-axis represents the algorithm inputs applied, and the y-axis denotes the relative MSE calculated with D-input algorithms as a reference case.
Figure 3. Boxplots represent the training MSE results of the algorithms using UX, N=20, 24, 30 samples with complexity (3,2). The x-axis represents the algorithm inputs applied, and the y-axis denotes the relative MSE calculated with D-input algorithms as a reference case.