Human–robot interaction (HRI) is a broad research topic, which is defined as understanding, designing, developing, and evaluating the robotic system to be used with or by humans. This paper reviews the variable admittance (VA) control for human–robot co-manipulation tasks, where the virtual damping, inertia, or both are adjusted. An overview of the published research for the VA control approaches, their methods, the accomplished collaborative co-manipulation tasks and applications, and the criteria for evaluating them are presented and compared. Then, the performance of various VA controllers is compared and investigated. Furthermore, the perspectives, necessity, influences, and expectations of the HRI for future robotic systems, are discussed.
- human–robot interaction
- robot control
- variable admittance control
- co-manipulation tasks
- performance's comparison
- methods
- review
1. Introduction
2. Compliance Control (Impedance/Admittance)
|
Parameter |
Compliance Control |
|
|---|---|---|
Control | ||
|
1- It is the impedance control based on position [13]. 2- The position or velocity controller is used to control the robot and the desired compliant behavior is understood by the outer control loop. |
1- The force-based impedance control is used. 2- It is not only the controlled manipulator is required, but also the controller itself should have the impedance causality. |
|
|
Representation |
|
|

|
Schemes of Control |
Work Space |
Measured Variables |
Appropriate Applied Situations |
Control Aims |
|
Admittance Controller |
Impedance Controller |
|||
|---|---|---|---|---|
|
Position Control |
Task space |
Position |
Free motion |
Desired position |
|
Force Control |
Task space |
Contact Force |
Constrained motion |
Desired contact force |
|
Hybrid Control |
Position subspace |
Position |
All motion kinds |
Desired position |
|
Force subspace |
Contact Force |
Desired contact force |
||
|
Impedance/ Admittance Control |
Task space |
Position, Contact Force |
All motion kinds |
Impedance/ Admittance |
|
Use |
It is used with HRI in which there is no interaction between the robot and the stiff environment. |
The main aim of the methodology of impedance control is modulating the manipulator’s mechanical impedance [6]. |
||
|
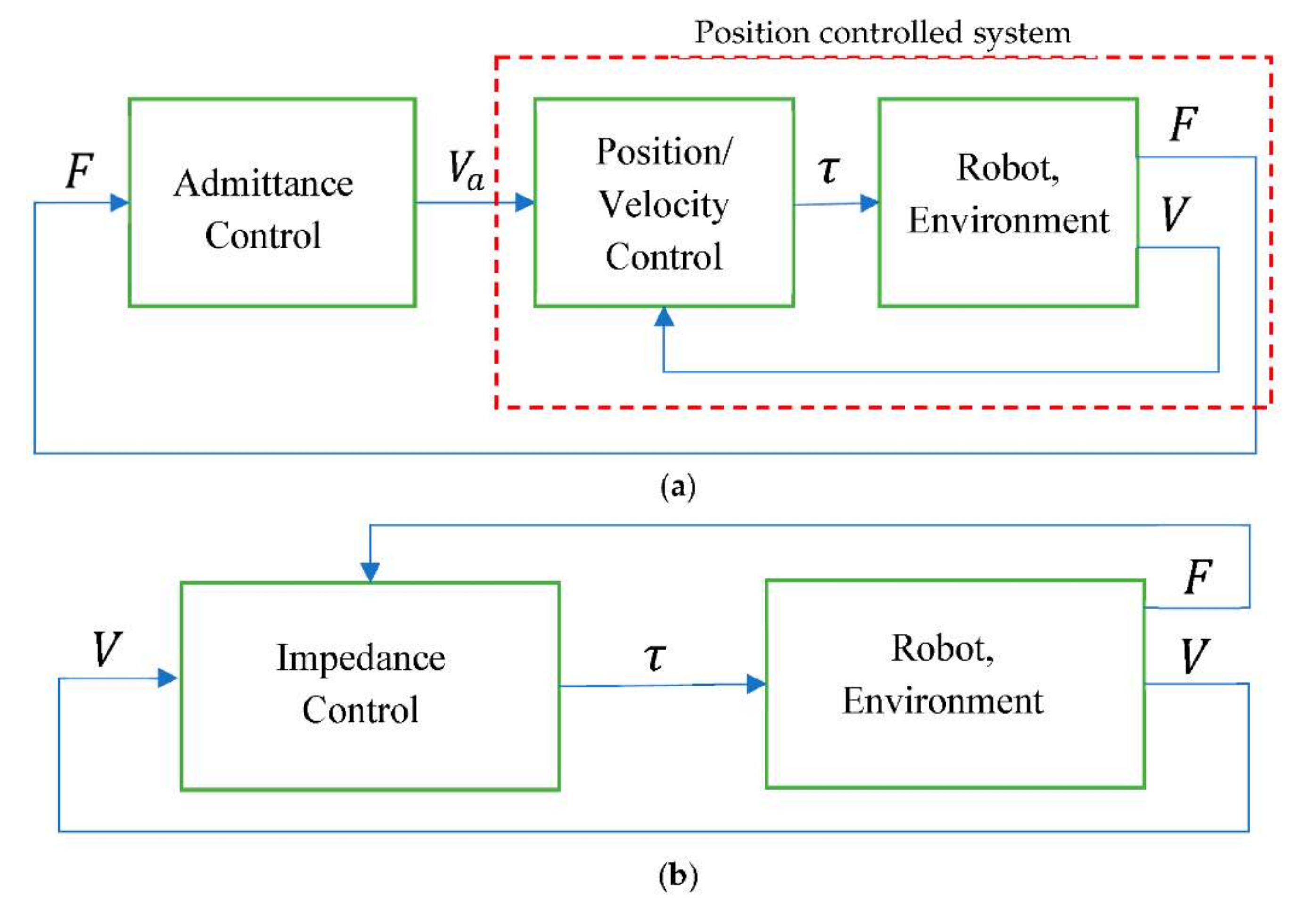
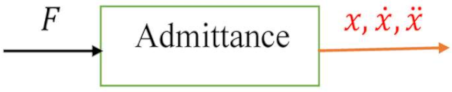
Inputs and Outputs |
It maps the applied forces into robot motion, as shown in Figure 1a. |
The motion is the input, whereas the output is the force as shown in Figure 1b [8][9]. |
||
|
Rendering |
1- It can render only the virtual stiff surfaces, whereas it cannot render the low inertia. 2- It is negatively affected during the dynamic interaction with the real stiff surfaces (constrained motion) [10][11][12]. |
1- It can render low inertia, whereas it cannot render the virtual stiff surfaces. 2- It is negatively affected during the dynamic interaction with the low inertia (free motion) [12]. |