Human–robot interaction (HRI) is a broad research topic, which is defined as understanding, designing, developing, and evaluating the robotic system to be used with or by humans. This paper reviews the variable admittance (VA) control for human–robot co-manipulation tasks, where the virtual damping, inertia, or both are adjusted. An overview of the published research for the VA control approaches, their methods, the accomplished collaborative co-manipulation tasks and applications, and the criteria for evaluating them are presented and compared. Then, the performance of various VA controllers is compared and investigated. Furthermore, the perspectives, necessity, influences, and expectations of the HRI for future robotic systems, are discussed.
- human–robot interaction
- robot control
- variable admittance control
- co-manipulation tasks
- performance's comparison
- methods
- review
1. Introduction
2. Compliance Control (Impedance/Admittance)
|
Parameter |
Compliance Control |
|
|---|---|---|
Control | ||
|
1- It is the impedance control based on position [13]. 2- The position or velocity controller is used to control the robot and the desired compliant behavior is understood by the outer control loop. |
1- The force-based impedance control is used. 2- It is not only the controlled manipulator is required, but also the controller itself should have the impedance causality. |
|
|
Representation |
|
|

|
Schemes of Control |
Work Space |
Measured Variables |
Appropriate Applied Situations |
Control Aims |
|
Admittance Controller |
Impedance Controller |
|||
|---|---|---|---|---|
|
Position Control |
Task space |
Position |
Free motion |
Desired position |
|
Force Control |
Task space |
Contact Force |
Constrained motion |
Desired contact force |
|
Hybrid Control |
Position subspace |
Position |
All motion kinds |
Desired position |
|
Force subspace |
Contact Force |
Desired contact force |
||
|
Impedance/ Admittance Control |
Task space |
Position, Contact Force |
All motion kinds |
Impedance/ Admittance |
|
Use |
It is used with HRI in which there is no interaction between the robot and the stiff environment. |
The main aim of the methodology of impedance control is modulating the manipulator’s mechanical impedance [6]. |
||
|
Inputs and Outputs |
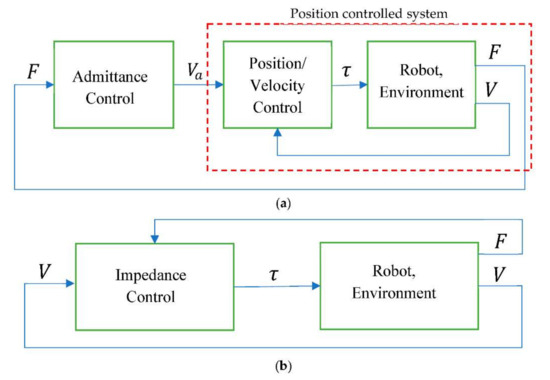
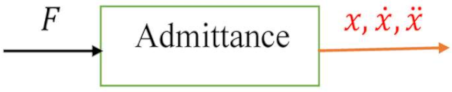
It maps the applied forces into robot motion, as shown in Figure 1a. |
The motion is the input, whereas the output is the force as shown in Figure 1b [8][9]. |
||
|
Rendering |
1- It can render only the virtual stiff surfaces, whereas it cannot render the low inertia. 2- It is negatively affected during the dynamic interaction with the real stiff surfaces (constrained motion) [10][11][12]. |
1- It can render low inertia, whereas it cannot render the virtual stiff surfaces. 2- It is negatively affected during the dynamic interaction with the low inertia (free motion) [12]. |

 For a relatively specific case where the inertia and damping matrices are decoupled with respect to the world coordinates, Equation (2) is written in the following form:
For a relatively specific case where the inertia and damping matrices are decoupled with respect to the world coordinates, Equation (2) is written in the following form:
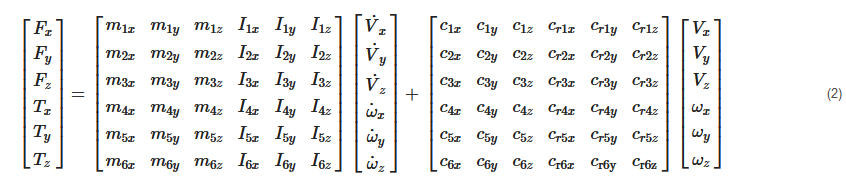
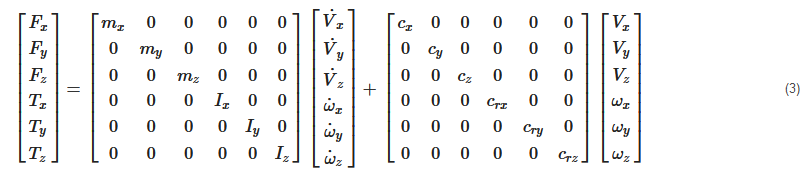 where, mx, my, and mz represent the virtual inertia parameter of the admittance control in directions of Cartesian coordinate system during the linear motion, whereas Ix, Iy, and Iz represent the virtual inertia during the rotation. Additionally, cx, cy, and cz represent the virtual damping during the linear motion, whereas crx, cry, and crz represent the virtual damping during the rotation.
represent the virtual damping during the rotation.
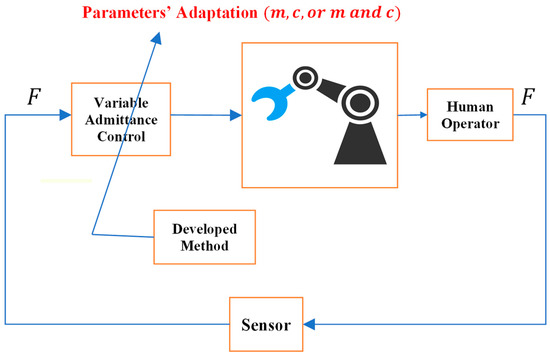
Here, the admittance controller is reviewed, particularly the VA controller in co-manipulation tasks, where either the virtual inertia m or the virtual damping c or both of them are adjusted for facilitating the robot’s cooperation with the human, as presented in Figure 2.
where, mx, my, and mz represent the virtual inertia parameter of the admittance control in directions of Cartesian coordinate system during the linear motion, whereas Ix, Iy, and Iz represent the virtual inertia during the rotation. Additionally, cx, cy, and cz represent the virtual damping during the linear motion, whereas crx, cry, and crz represent the virtual damping during the rotation.
represent the virtual damping during the rotation.
Here, the admittance controller is reviewed, particularly the VA controller in co-manipulation tasks, where either the virtual inertia m or the virtual damping c or both of them are adjusted for facilitating the robot’s cooperation with the human, as presented in Figure 2.
3. Methods for VA Control System in Co-Manipulation Tasks
In this section, the developed methods for the VA controller are presented whether the virtual damping parameter or the virtual inertia parameter is only adjusted, or both are adjusted simultaneously. Parameters of VA controllers are adjusted based on different techniques such as human intention, passivity-preserving strategy, transmitted power from human to robot, and data-based approaches such as fuzzy logic, neural network, trajectory prediction, and online and fast Fourier transform (FFT) of measured forces [15][16][17][18][19][20][21][22][23][24][25][26][27][28][29]. These classifications are presented in Figure 3.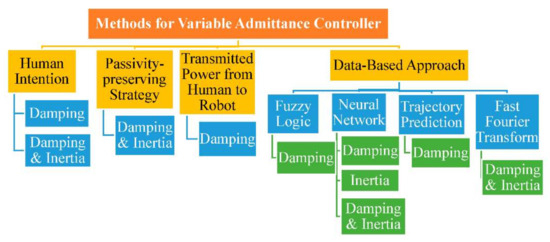
4. Accomplished Co-Manipulation Tasks with VA Control
During the development and the evaluation of the VA control, different tasks were proposed and accomplished by the researchers. These tasks are classified into two main categories as follows:- (1)
-
The collaborative co-manipulation tasks in which the human effort and oscillations should be reduced.
- (2)
-
The rehabilitations tasks in which the robot should apply high force and assist the human, or in other cases the robot should leave the patient to act alone. These types of tasks are out of scope of this paper.Collaborative co-manipulation tasks, such as pick and place task, point-to-point movement, drawing task, and manipulating of large objects, were proposed with the following research works. Duchaine and Gosselin [16] designed their VA control system for the collaborative pick and place task as well as the drawing task. With Lecours et al. [25], the drawing task as well as giving an impulse for the assisting device were their accomplished tasks to develop and evaluate the variable controller. In [24], TSUMUGIWA et al. executed the point-to-point movement as the desired task for developing and evaluating their VA controller. The task achieved by Sidiropoulos et al. [19] to develop and evaluate their VA control system was the manipulating of large objects with high inertia. The rotational movement of a joint of a minimally invasive surgical manipulator between two targets in a single direction was used as the proposed task with Z. Du et al. [22]. In [23], Dimeas and Aspragathos developed their VA control system for a point to point movement along a single direction of the Cartesian robot workspace. Their VA control was evaluated using different movements; short, medium, and long distances. Sharkawy et al. [15][17][28][29] developed and designed their VA control system for a point-to-point movement along a single direction of the Cartesian robot workspace. In addition, their VA control was evaluated using different movements; short, medium, and long distances. In [29], the VA control was evaluated by mounting a load or an object of 1 kg to the robot’s end-effector for simulating the transferring process of an object from a place to another guided by the human. The motion was also along straight-line segment (short, medium, and long distances). Furthermore, the VA control was tested and investigated along different axis of motion and along straight-line segment. Wang et al. [21] developed their VA control for simulating an experiment in which the robot was operated for grinding the prosthesis implantation plane. The selected task path was an N-shaped path covering the plane. A rehabilitation task was proposed by Topini et al. [20]. They designed a hand exoskeleton system for interfacing with the VA control for achieving virtual reality-based rehabilitation tasks. The tasks used in their work were free motion and grasping virtual spherical object. Although different tasks were used with the researchers, other realistic tasks and applications are recommended to be investigated and applied, such as curved and complex motions. Furthermore, the tasks in real (industrial, medical, agriculture, etc.) environments can be achieved.
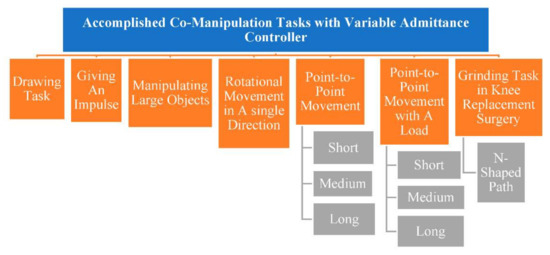 Figure 4. The robotic tasks accomplished during the development and the evaluation of the VA control that appeared in the literature.
Figure 4. The robotic tasks accomplished during the development and the evaluation of the VA control that appeared in the literature.5. Performance’s Comparison of VA Controllers in Co-Manipulation Tasks
The main used criteria for evaluation of the developed VA control included the following terms:- (1)
-
The required effort for performing the task.
- (2)
-
The needed time for executing the task.
- (3)
-
The oscillations and the number of overshoots.
- (4)
-
The achieved accuracy.
- (5)
-
The accumulated jerk.
- (6)
-
The opposition of the robot to human forces.From this discussion, it is difficult to compare the performance of all VA control systems quantitatively because the used criteria and the accomplished tasks with each system are different from the others. In addition, the obtained results with some VA control systems in form of values are missing. However, we present a figure that can compare the performance of the closest VA systems to help the reader to see the difference easily. These systems are as follows:
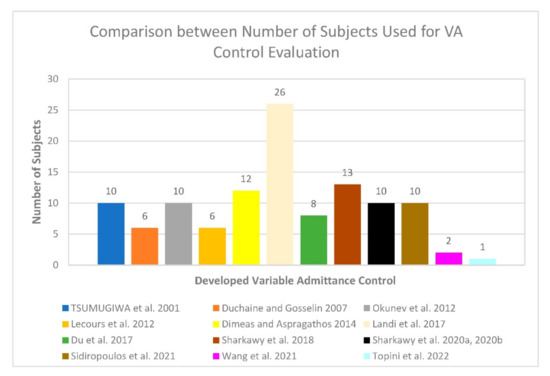 Figure 5. The comparison between the number of subjects used to evaluate the developed VA control, according to the literature presented in this subsection.
Figure 5. The comparison between the number of subjects used to evaluate the developed VA control, according to the literature presented in this subsection.- (1)
-
The VA control system based on inference of human intention [16],
- (2)
-
The VA control system depending on transmitted power by human to robot [19],
- (3)
-
The VA control system based on the velocity norm [31],
- (4)
-
The neural network-based system to adjust the damping only [28],
- (5)
-
The neural network-based system to adjust the inertia only [29], and
- (6)
-
The VA control system depending on the trajectory’s prediction of the motion of a human hand [21].The good results obtained from these previous works need further investigation by developing new methods for variable admittance control. In addition, as is clear from Figure 6, using a neural network-based approach is promising in improving the performance of the VA control system in a better way. This needs further investigation by applying different types of neural networks as well as deep learning-based techniques.
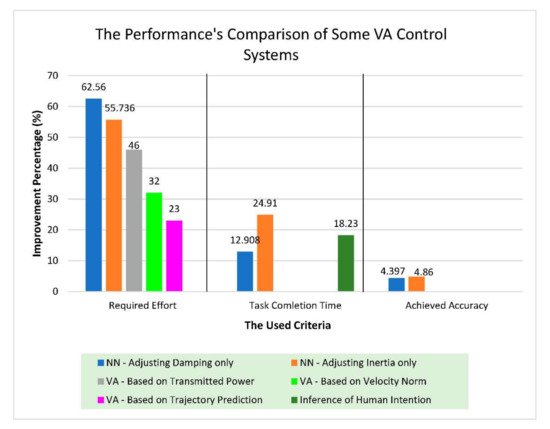 Figure 6. The performance’s comparison between some developed VA control systems. The main criteria used are the required human effort, needed task time, and the obtained accuracy.
Figure 6. The performance’s comparison between some developed VA control systems. The main criteria used are the required human effort, needed task time, and the obtained accuracy.6. Perspectives
In HRI control, some issues should be taken into consideration. The first issue is that developing VA controllers for robotic manipulators depending on the soft computing-based techniques are promising and needed in improving the HRI’s performance. Further investigation by applying different types of neural networks and deep learning-based techniques is recommended. The second issue is that, as made clear from the literature, only one paper dealt with adjusting only the virtual inertia parameter of the admittance control. The results from this paper proved that adjusting the inertia only improved the stability of the system, minimized the oscillations, and generally improved the performance of HRI. Therefore, further investigation for adjusting only the virtual inertia is required and needed. The third issue is that developing new VA controllers should avoid large numbers of computations and complexity. In addition, these systems should avoid expert knowledge for intuitive cooperation. The fourth issue is that the introduced criteria in the current paper to evaluate the VA controllers should be taken into consideration while developing new variable controllers. Furthermore, new criterion can be considered that analyze the oscillations during the robot motion. The last issue is that more realistic tasks should be investigated during development and evaluation of the new VA controllers. These tasks can include curved and complex motions and tasks in real (industrial, medical, agriculture, etc.) environments. Furthermore, the number of subjects used in evaluating the VA controller should be more than 30 subjects for more real and justified statistics.
7. Conclusion
In the current paper, a review is presented for VA control systems in human-robot co-manipulation tasks. The different techniques for their development, the achieved robotic tasks, the performance’s comparison are discussed deeply. The results from this review recommend using soft computing techniques, as they are promising methods in improving HRI’s performance. In addition, more realistic tasks and increasing the number of subjects used to evaluate the VA controllers should be considered. Some perspectives and expectations of the control of HRI are also presented and discussed.
References
- Dautenhahn, K. Methodology & Themes of Human-Robot Interaction: A Growing Research Field. Int. J. Adv. Robot. Syst. 2007, 4, 103–108.
- Moniz, A.B.; Krings, B. Robots Working with Humans or Humans Working with Robots ? Searching for Social Dimensions in New Human-Robot Interaction in Industry. Societies 2016, 6, 23.
- De Santis, A.; Siciliano, B.; De Luca, A.; Bicchi, A. An atlas of physical human—Robot interaction. Mech. Mach. Theory 2008, 43, 253–270.
- Khatib, O.; Yokoi, K.; Brock, O.; Chang, K.; Casal, A. Robots in Human Environments: Basic Autonomous Capabilities. Int. J. Rob. Res. 1999, 18, 684–696.
- Song, P.; Yu, Y.; Zhang, X. A Tutorial Survey and Comparison of Impedance Control on Robotic Manipulation. Robotica 2019, 37, 801–836.
- Hogan, N. Impedance control: An approach to manipulation: Part I theory; Part II implementation; Part III applications. J. Dynamlc Syst. Meas. Contral 1985, 107, 1–24.
- Sam Ge, S.; Li, Y.; Wang, C. Impedance adaptation for optimal robot—Environment interaction. Int. J. Control 2014, 87, 249–263.
- Ott, C.; Mukherjee, R.; Nakamura, Y. Unified impedance and admittance control. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 554–561.
- Dimeas, F. Development of Control Systems for Human-Robot Collaboration in Object Co-Manipulation. Ph.D. Thesis, University of Patras, Patras, Greece, 2017.
- Newman, W.S.; Zhang, Y. Stable interaction control and coulomb friction compensation using natural admittance control. J. Robot. Syst. 1994, 1, 3–11.
- Surdilovic, D. Contact Stability Issues in Position Based Impedance Control: Theory and Experiments. In Proceedings of the 1996 IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, USA, 22–28 April 1996; pp. 1675–1680.
- Adams, R.J.; Hannaford, B. Stable Haptic Interaction with Virtual Environments. IEEE Trans. Robot. Autom. 1999, 15, 465–474.
- Ott, C. Cartesian Impedance Control of Redundant and Flexible-Joint Robots; Siciliano, B., Khatib, O., Groen, F., Eds.; Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2008; Volume 49, pp. 1–192. ISBN 9783540692539.
- Song, P.; Yu, Y.; Zhang, X. Impedance control of robots: An overview. In Proceedings of the 2017 2nd International Conference on Cybernetics, Robotics and Control (CRC), Chengdu, China, 21–23 July 2017; pp. 51–55.
- Sharkawy, A.-N. Intelligent Control and Impedance Adjustment for Efficient Human-Robot Cooperation. Ph.D. Thesis, University of Patras, Patras, Greece, 2020.
- Duchaine, V.; Gosselin, M. General Model of Human-Robot Cooperation Using a Novel Velocity Based Variable Impedance Control. In Proceedings of the Second Joint EuroHaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems (WHC’07), Tsukuba, Japan, 22–24 March 2007; pp. 446–451.
- Sharkawy, A.-N.; Koustoumpardis, P.N.; Aspragathos, N. A recurrent neural network for variable admittance control in human—Robot cooperation: Simultaneously and online adjustment of the virtual damping and Inertia parameters. Int. J. Intell. Robot. Appl. 2020, 4, 441–464.
- Yang, C.; Peng, G.; Li, Y.; Cui, R.; Cheng, L.; Li, Z. Neural networks enhanced adaptive admittance control of optimized robot-environment interaction. IEEE Trans. Cybern. 2019, 49, 2568–2579.
- Sidiropoulos, A.; Kastritsi, T.; Papageorgiou, D.; Doulgeri, Z. A variable admittance controller for human-robot manipulation of large inertia objects. In Proceedings of the 2021 30th IEEE International Conference on Robot and Human Interactive Communication, RO-MAN 2021, Vancouver, BC, Canada, 8–12 August 2021; pp. 509–514.
- Topini, A.; Sansom, W.; Secciani, N.; Bartalucci, L.; Ridolfi, A.; Allotta, B. Variable Admittance Control of a Hand Exoskeleton for Virtual Reality-Based Rehabilitation Tasks. Front. Neurorobot. 2022, 15, 1–18.
- Wang, Y.; Yang, Y.; Zhao, B.; Qi, X.; Hu, Y.; Li, B.; Sun, L.; Zhang, L.; Meng, M.Q.H. Variable admittance control based on trajectory prediction of human hand motion for physical human-robot interaction. Appl. Sci. 2021, 11, 5651.
- Du, Z.; Wang, W.; Yan, Z.; Dong, W.; Wang, W. Variable Admittance Control Based on Fuzzy Reinforcement Learning for Minimally Invasive Surgery Manipulator. Sensors 2017, 17, 844.
- Dimeas, F.; Aspragathos, N. Fuzzy Learning Variable Admittance Control for Human-Robot Cooperation. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014), Chicago, IL, USA, 14–18 September 2014; pp. 4770–4775.
- Tsumugiwa, T.; Yokogawa, R.; Hara, K. Variable Impedance Control with Regard to Working Process for Man-Machine Cooperation-Work System. In Proceedings of the 2001 IEEE/RsI International Conference on Intelligent Robots and Systems, Maui, HI, USA, 29 October–3 November 2001; pp. 1564–1569.
- Lecours, A.; Mayer-st-onge, B.; Gosselin, C. Variable admittance control of a four-degree-of-freedom intelligent assist device. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 3903–3908.
- Okunev, V.; Nierhoff, T.; Hirche, S. Human-preference-based Control Design: Adaptive Robot Admittance Control for Physical Human-Robot Interaction. In Proceedings of the 2012 IEEE RO-MAN: The 21st IEEE International Symposium on Robot and Human Interactive Communication, Paris, France, 9–13 September 2012; pp. 443–448.
- Landi, C.T.; Ferraguti, F.; Sabattini, L.; Secchi, C.; Bonf, M.; Fantuzzi, C. Variable Admittance Control Preventing Undesired Oscillating Behaviors in Physical Human-Robot Interaction. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3611–3616.
- Sharkawy, A.-N.; Koustoumpardis, P.N.; Aspragathos, N. Variable Admittance Control for Human—Robot Collaboration based on Online Neural Network Training. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2018), Madrid, Spain, 1–5 October 2018.
- Sharkawy, A.-N.; Koustoumpardis, P.N.; Aspragathos, N. A Neural Network based Approach for Variable Admittance Control in Human- Robot Cooperation: Online Adjustment of the Virtual Inertia. Intell. Serv. Robot. 2020, 13, 495–519.
- Sauro, J. A Practical Guide to the System Usability Scale: Background, Benchmarks and Best Practices; CreateSpace Independent Publishing Platform: Scotts Valley, CA, USA, 2011; pp. 1–162.
- Ficuciello, F.; Villani, L.; Siciliano, B. Variable Impedance Control of Redundant Manipulators for Intuitive Human-Robot Physical Interaction. IEEE Trans. Robot. 2015, 31, 850–863.