With the availability of modern assistive techniques, ambient intelligence, and the Internet of Things (IoT), various innovative assistive environments have been developed, such as driving assistance systems (DAS), where the human driver can be provided with physical and emotional assistance. In this human–machine collaboration system, haptic interaction interfaces are commonly employed because they provide drivers with a more manageable way to interact with other components. From the view of control system theory, this is a typical closed-loop feedback control system with a human in the loop. To make such a system work effectively, both the driving behaviour factors, and the electrical–mechanical components should be considered. However, the main challenge is how to deal with the high degree of uncertainties in human behaviour.
- haptic warning
- haptic guidance
- driving assistance systems
- driving behaviour model
- steering wheel angle
- model-free controller
1 Introduction
2. Haptic Warning Systems
3. Haptic Guidance In-Vehicle Control
| Function | Related Works | Design Issues | Location | Time Response | Measure Methods | Performance | Significance |
|---|---|---|---|---|---|---|---|
| Warning | [23] | LDWS | Steering wheel | (0.52s,1.19s) | - | - | - |
| Warning | [27] | LDWS | Pedals | (1.53s,_) | - | - | - |
| Warning | [24] | Navigation | Steering wheel | (1.9s,5s) | - | - | - |
| Warning | [25] | Navigation | Steering wheel (two sides) |
(17s,24s) | - | - | - |
| Warning | [26] | Navigation | Seat vibration | (0.89s,1.24s) | - | - | - |
| Warning | [28] | Navigation | Seat vibration | (3.8s,12.5s) | - | - | - |
| Warning | [31][32] | Collision | Seat belt | (0.65s,0.9s) | - | - | - |
| Warning | [33] | Collision | Seat belt | (1.4s,1.6s) | - | - | - |
| Warning | [35] | Collision | Seat | (0.257s,_) | - | - | - |
| Guidance | [12] | Lane-keeping | Steering wheel | - | Melateral | F(1.4,23.6)=72.3 | p<0.001 |
| Guidance | [38] | Curve negotiation |
Steering wheel | - | SDelateral Maxelateral |
F(1,31) = 38.531 F(1,31) = 60.731 |
p<0.001 p<0.001 |
| Guidance | [39] | Lane-keeping | Steering wheel | - | RMSelateral RMSelateral |
F(1,21)=4.9 F(1,21)=12 |
p=0.05 p=0.005 |
| Guidance | [37] | Lane-keeping | Steering wheel | - | M|elateral| SD|elateral| Max|elateral| SD|elateral| M∣∣eaf−ef∣∣ Max∣∣eaf−ef∣∣ |
0.144 m 0.044 m 0.552 m 0.086 m 0.170 m 0.265 |
p<0.0001 p<0.0001 p<0.0001 p<0.0001 p<0.0001 p<0.0001 |
| Guidance | [47] | Lane-keeping | Steering wheel | - | Melateral | F(3,36)=1 | p<0.4035 |
| Guidance | [44] | Lane-keeping | Steering wheel | - | SDelateral | F(1,21)=6.26 | p<0.05 |
| Guidance | [49] | Curve negotiation | Steering wheel | - | SD|elateral| M|elateral| |
t=4.699 t=2.643 |
p=0.001 p=0.023 |
4. Prospective Directions for Developing a Robust Controller Considering Differences in Driving Behaviours in Haptic Systems
5. Discussion
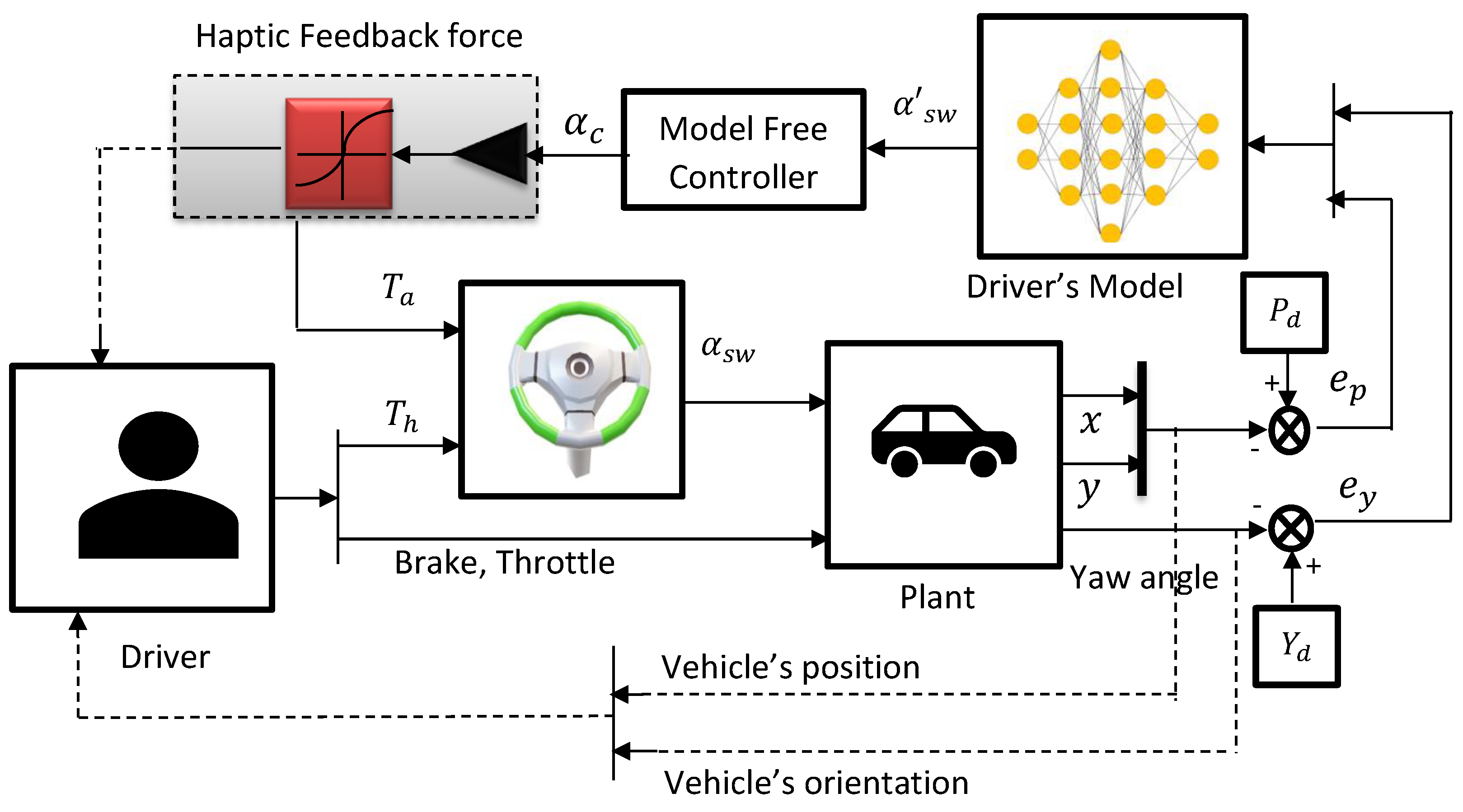
The above sections discussed and presented an analysis and comparison of different haptic systems’ impact on driving behaviour performance. The driving behaviour modelling system was investigated and the driver behaviour control in the driver–vehicle–road system with and without haptic feedback was explored. The outcome of the studies indicated that the haptic warning system mostly used vibration as the transmission signal, while haptic guidance used a shared control force feedback. Moreover, the haptic feedback was applied to the drivers to enhance their driving performance (reducing the lateral displacement errors and the orientation deviation), lower the response time, and reduce the mental workload (awareness of surroundings, lane departures, collision prevention). However, false alarms, vibrations on uneven roads, and the lack of an accurate driving behaviour model adversely impacted its performance. The conflict between the haptic guidance system torque and the driver was noted when the driver’s steering intention differed from the assistive system. In addition, the after-effect matter, which occurs when a driver is expecting force feedback (torque), but the system provides null, has been considered. Implementing the driving behaviour model based on neuromuscular dynamic and visual feedback into the shared haptic control system has improved the driving performance and significantly reduced the driver and haptic guidance conflict. Although the investigation results of the techniques used to model driving behaviour have presented promising results, such as perfect matches, the models based on the mathematical model are less robust due to the many assumptions made by them. Statistical approaches, such as the hidden Markov model (HMM) using the sequence of necessary action to represent driving behaviour, were based on the actual and future state, but did not consider the past state. HMMs, combined with other techniques, were proposed to fulfil the lack of not using past input information. The artificial neural networks developed to mimic the driving behaviour were attended to meticulously. However, the model’s lack of real data and vulnerability to sudden lane changes was noted. This overview extensively discussed different driving behaviour models and controllers with and without haptic feedback. Despite the fact that fast response times and stability and displacement errors were obtained based on the optimisation technique, some proposed controls for enhancing driving behaviour deviations based on mathematical principles were less robust due to the many assumptions that were applied. Moreover, the lack of consideration of the individual differences in a driver–vehicle–road system makes the controller less robust and less efficient for different driving styles. Thus, a prospective model-free controller was proposed which considered the drawbacks discussed in the literature to enhance the driving behaviour control’s performance (transparency and robustness), considering the differences in driving style (various steering wheel angles, yaw angle, velocity). Furthermore, it is necessary to synthesise such a system in the view of control system theory to ensure the system performances, such as transparency and robustness, which is to be covered in future works.References
- De Waard, D. The Measurement of Drivers’ Mental Workload. Ph.D. Thesis, University of Groningen, Haren, The Netherlands, 1996.
- Pack, A.I.; Pack, A.M.; Rodgman, E.; Cucchiara, A.; Dinges, D.F.; Schwab, C.W. Characteristics of crashes attributed to the driver having fallen asleep. Accid. Anal. Prev. 1995, 27, 769–775.
- Sun, P.; Song, R.; Wang, H.X. Analysis of the causes of traffic accidents on roads and countermeasures. Saf. Environ. Eng. 2007, 2, 2007.
- Navarro, J.; Mars, F.; Young, M.S. Lateral control assistance in car driving: Classification, review and future prospects. IET Intell. Transp. Syst. 2011, 5, 207–220.
- Jermakian, J.S. Crash avoidance potential of four passenger vehicle Technologies. Accid. Anal. Prev. 2011, 43, 732–740.
- Fenton, R.E. An improved man-machine interface for the driver-vehicle system. IEEE Trans. Hum. Factors Electron. 1966, 4, 150–157.
- Endsley, M.R.; Kaber, D.B. Level of automation effects on performance, situation awareness and workload in a dynamic control task. Ergonomics 1999, 42, 462–492.
- De Groot, S.; De Winter, J.C.; Garcia, J.M.L.; Mulder, M.; Wieringa, P.A. The effect of concurrent bandwidth feedback on learning the lane-keeping task in a driving simulator. Hum. Factors 2011, 53, 50–62.
- Singh, H.; Bhatia, J.S.; Kaur, J. Eye tracking based driver fatigue monitoring and warning system. In Proceedings of the India International Conference on Power Electronics 2010 (IICPE2010), New Delhi, India, 28–30 January 2011; pp. 1–6.
- Parasuraman, R. Designing automation for human use: Empirical studies and quantitative models. Ergonomics 2000, 43, 931–951.
- Abbink, D.A.; Mulder, M.; Boer, E.R. Haptic shared control: Smoothly shifting control authority? Cogn. Technol. Work. 2012, 14, 19–28.
- Kienle, M.; Dambock, D.; Bubb, H.; Bengler, K. The ergonomic value of a bidirectional haptic interface when driving a highly auto mated vehicle. Cognition 2013, 15, 475–482.
- Mulder, M.; Abbink, D.A.; Boer, E.R. The effect of haptic guidance on curve negotiation behavior of young, experienced drivers. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, Singapore, 12–15 October 2008; pp. 804–809.
- Goodrich, K.H.; Schutte, P.C.; Flemisch, F.O.; Williams, R.A. Application of the h-mode, a design and interaction concept for highly automated vehicles, to aircraft. In Proceedings of the IEEE/AIAA 25TH Digital Avionics Systems Conference, Portland, ON, USA, 15–19 October 2006; pp. 1–13.
- Petermeijer, S.M.; Abbink, D.A.; de Winter, J.C. Should drivers be operating within an automation-free bandwidth? Evaluating haptic steering support systems with different levels of authority. Hum. Factors 2015, 57, 5–20.
- Bao, S.; Wu, L.; Yu, B.; Sayer, J.R. An examination of teen drivers’car-following behavior under naturalistic driving conditions: With and without an advanced driving assistance system. Accid. Anal. Prev. 2020, 147, 105–762.
- Zokaei, M.; Jafari, M.J.; Khosrowabadi, R.; Nahvi, A.; Khodakarim, S.; Pouyakian, M. Tracing the physiological response and behavioral performance of drivers at different levels of mental workload using driving simulators. J. Saf. Res. 2020, 72, 213–223.
- Wang, Z.; Zheng, R.; Kaizuka, T.; Shimono, K.; Nakano, K. The effect of a haptic guidance steering system on fatigue-related driver 34 behaviors. IEEE Trans.-Hum.-Mach. Syst. 2017, 47, 741–748.
- Wang, Z.; Zheng, R.; Kaizuka, T.; Nakano, K. Driver-automation shared control: Modeling driver behavior by taking account of reliance on haptic guidance steering. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 144–149.
- You, C.; Tsiotras, P. Optimal two-point visual driver model and controller development for driver-assist systems for semi-autonomous vehicles. In Proceedings of the American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 5976–5981.
- Saleh, L.; Chevrel, P.; Claveau, F.; Lafay, J.F.; Mars, F. Shared steering control between a driver and an automation: Stability in the presence of driver behavior uncertainty. IEEE Trans. Intell. Transp. Syst. 2013, 14, 974–983.
- Klauer, S.G.; Guo, F.; Sudweeks, J.; Dingus, T.A. An Analysis of Driver Inattention Using a Case-Crossover Approach on 100-Car Data: Final Report. 2010. Available online: https://www.nhtsa.gov/document/analysis-driver-inattention-using-case-crossover-approach-100-car-data-final-report (accessed on 15 March 2022).
- Suzuki, K.; Jansson, H. An analysis of driver’s steering behaviour during auditory or haptic warnings for the designing of lane departure warning system. JSAE Rev. 2003, 24, 65–70.
- Enriquez, M.; Afonin, O.; Yager, B.; Maclean, K. A pneumatic tactile alerting system for the driving environment. In Proceedings of the 2001 Workshop on Perceptive User Interfaces, Orlando, FL, USA, 15–16 November 2001; pp. 1–7.
- Onimaru, S.; Kitazaki, M. Visual and tactile information to improve drivers’ performance. In Proceedings of the IEEE Virtual Reality Conference (VR), Boston, MA, USA, 20–24 March 2010; pp. 295–296.
- Stanley, L.M. Haptic and auditory cues for lane departure warnings. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting; SAGE Publications: Los Angeles, CA, USA, 2006; Volume 50, pp. 2405–2408.
- Morrell, J.; Wasilewski, K. Design and evaluation of a vibrotactile seat to improve spatial awareness while driving. In Proceedings of the 2010 IEEE Haptics Symposium, Waltham, MA, USA, 25–26 March 2010; pp. 281–288.
- Locken, A.; Buhl, H.; Heuten, W.; Boll, S. TactiCar: Towards Supporting Drivers During Lane Change Using Vibro-Tactile Patterns. In Proceedings of the 7th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Nottingham, UK, 1–3 September 2015; pp. 32–37.
- Ochiai, Y.; Toyoshima, K. Invisible feet under the vehicle. In Proceedings of the 3rd Augmented Human International Conference, Megève, France, 8–9 March 2012; pp. 1–2.
- Ahtamad, M.; Gray, R.; Ho, C.; Reed, N.; Spence, C. Informative collision warnings: Effect of modality and driver age. In Proceedings of the Eighth International Driving Symposium on Human Factors in Driver Assessment, Training and Vehicle Design, Snowbird, Salt Lake City, UT, USA, 22–25 June 2015; pp. 324–330.
- Scott, J.; Gray, R. A comparison of tactile, visual, and auditory warnings for rear-end collision prevention in simulated driving. Hum. Factors 2008, 50, 264–275.
- Mohebbi, R.; Gray, R.; Tan, H.Z. Driver reaction time to tactile and auditory rear-end collision warnings while talking on a cell phone. Hum. Factors 2009, 51, 102–110.
- De Rosario, H.; Louredo, M.; Dıaz, I.; Soler, A.; Gil, J.J.; Solaz, J.S.; Jornet, J. Efficacy and feeling of a vibrotactile frontal collision warning implemented in a haptic pedal. Transp. Res. Part F Traffic Psychol. Behav. 2010, 13, 80–91.
- Fitch, G.M.; Kiefer, R.J.; Hankey, J.M.; Kleiner, B.M. Toward developing an approach for alerting drivers to the direction of a crash threat. Hum. Factors 2007, 49, 710–720.
- Kurihara, Y.; Hachisu, T.; Sato, M.; Fukushima, S.; Kajimoto, H. Periodic tactile feedback for accelerator pedal control. In Proceedings of the 2013 World Haptics Conference (WHC), Daejeon, Korea, 14–17 April 2013; pp. 187–192.
- Ho, C. Haptic interface for the distracted drivers. In Proceedings of the 2008 SICE Annual Conference, Chofu, Japan, 20–22 August 2008; pp. 890–893.
- Petermeijer, S.M.; Abbink, D.A.; Mulder, M.; De Winter, J.C. The effect of haptic support systems on driver performance: A litera ture survey. IEEE Trans. Haptics 2015, 8, 467–479.
- Mulder, M.; Abbink, D.A.; Boer, E.R. Sharing control with haptics: Seamless driver support from manual to automatic control. Hum. Factors 2012, 54, 786–798.
- Griffiths, P.G.; Gillespie, R.B. Sharing control between humans and automation using haptic interface: Primary and secondary task performance benefits. Hum. Factors 2005, 47, 574–590.
- Zhao, Y.; Pano, B.; Chevrel, P.; Claveau, F.; Mars, F. Driver model validation through interaction with varying levels of haptic guidance. In Proceedings of the 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Toronto, ON, Canada,, 11–14 October 2020; pp. 2284–2290.
- Lam, T.M.; Boschloo, H.W.; Mulder, M.; Van Paassen, M.M. Artificial force field for haptic feedback in uav teleoperation. IEEE Trans. Syst. Man-Cybern.-Part A Syst. Hum. 2009, 39, 1316–1330.
- Mulder, M.; Pauwelussen, J.J.; Van Paassen, M.M.; Mulder, M.; Abbink, D.A. Active deceleration support in car following. IEEE Trans. Syst. Man-Cybern.-Part A Syst. Hum. 2010, 40, 1271–1284.
- Alaimo, S.M.; Pollini, L.; Bresciani, J.P.; Bulthoff, H.H. A comparison of direct and indirect haptic aiding for remotely piloted vehicles. In Proceedings of the 19th International Symposium in Robot and Human Interactive Communication, Viareggio, Italy, 13–15 September 2010; pp. 506–512.
- Mars, F.; Deroo, M.; Charron, C. Driver adaptation to haptic shared control of the steering wheel. In Proceedings of the 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC), San Diego, CA, USA, 5–8 October 2014; pp. 1505–1509.
- Marchal-Crespo, L.; McHughen, S.; Cramer, S.C.; Reinkensmeyer, D.J. The effect of haptic guidance, aging, and initial skill level on motor learning of a steering task. Exp. Brain Res. 2010, 201, 209–220.
- Crespo, L.M.; Reinkensmeyer, D.J. Haptic guidance can enhance motor learning of a steering task. J. Mot. Behav. 2008, 40, 545–557.
- Lee, H.; Choi, S. Combining haptic guidance and haptic disturbance: An initial study of hybrid haptic assistance for virtual steering task. In Proceedings of the 2014 IEEE Haptics Symposium (HAPTICS), Houston, TX, USA, 23–26 February 2014; pp. 159–165.
- Abbink, D.A.; Cleij, D.; Mulder, M.; Van Paassen, M.M. The importance of including knowledge of neuromuscular behaviour in haptic shared control. In Proceedings of the 2012 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Seoul, Korea, 14–17 October 2012; pp. 3350–3355.
- Wang, Z.; Zheng, R.; Kaizuka, T.; Nakano, K. The effect of haptic guidance on driver steering performance during curve negotiation with limited visual feedback. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 600–605.