1 Introduction
Human cognitive behaviours can affect car driving performance, such as perception (eyes, skin, muscle), knowledge (training, experience), and decision-making capacity. Many car accidents are caused by driver omissions, and factors such as workload and fatigue can lead to significant driver failures
[1][2][1,2]; 70% of road accidents are a consequence of driver inattention
[3]. Several studies have been suggested to enhance car lateral control
[4]. Results of a survey on car accidents indicate that the lane departure avoidance approach could probably prevent 31% of fatal car crashes
[5].
Fenton previously initiated a haptic feedback system to assist drivers
[6]. It was found that implementing an assistive system into a car driving operation leads to lowering the driver workload
[7]. A centre line or lane-keeping achievement is one of the significant measures of driver performance. De Groot et al.
[8] proposed a system that assists the driver in keeping the car in the lane’s centre when it exceeds a threshold by providing the operator with seat vibrations. Haptic warning feedback based on vibration information was set on the seat belt to alert the driver when he is fatigued
[9]. However, haptic warning feedback has limitations, such as fake alarms, inattention due to car vibrations, uneven driveways, and lower performance in lane-keeping. In addition, an extreme vibration stimulus may generate irritation to the driver
[10].
To overcome the haptic warning feedback drawbacks, continuous haptic steering guidance has been developed, providing a feedback torque relevant to the lane deviation to help the driver stay in the lane
[11]. Furthermore, some studies have shown that a continuous haptic assistive system appeared to lower the driver workload
[12] and enhance the target trajectory achievement
[13]. In this approach, the driving duty operates concurrently by the driver and the system via a shared control
[14]. In this system, the continuous haptic guidance captures the driver’s action and feeds back the corresponding force as a haptic stimulus.
However, some studies have reported that the functionality of continuous haptic guidance steering or haptic share control has a drawback when the driver’s intention does not match the steering haptic guidance torque
[11]. In addition, the after-effect problem occurred when a driver expected force feedback (torque), but the system provided a null field. To reduce the system’s after-effects, and the fake alarms, Petrmeijer et al.
[15] introduced bandwidth guidance to the existing haptic guidance to assist the driver at a specific range.
However, haptic guidance for lane-keeping assistance systems (LKASs) is developed only on the vehicle–road model. Therefore, the human behaviour model is not considered as a part of the overall system, and this cannot promise the driving performance (stability) nor guarantee that the system will handle significant errors stemming from human uncertainty.
Researchers have conducted several studies to model the driver or operator behaviour to reduce human failure in a system. De Waard used the information processing model to measure different drivers’ mental workload
[1]. Bao et al.
[16] examined teenagers’ driving behaviour with and without an advanced driver assistance system (ADAS), and they found that teenagers had less pedal control and have shorter time headway when driving at night compared to adults. Zokaei et al.
[17] provided research on tracing the physiological response and behavioural performance of a driver, which showed that an emotional conversation via a mobile phone could affect the electroencephalograph (EEG), which, therefore, will cause a decline in the behavioural performance of the driver and the brain. Wang et al.
[18] improved driving safety due to fatigue by analysing the impact of fatigue on driving behaviour and proposed a haptic guidance control that considers the driver’s fatigue. Later on, they developed a driving behaviour model based on the weighted fashion that considered the reliance on haptic shared control. In this system, they implemented environment visual feedback from the driver into driving automation
[19]. The consideration of the driving behaviour model in the driving–vehicle–road system where the operator’s attitude and the haptic guidance contributed to the steering action have reduced conflict between the driver and the vehicle–road system as detailed in haptic guidance, and the lane-keeping performance has been improved in
[20][21][20,21].
Drivers have different driving styles, which emanate from distinct perceptions and various levels of knowledge of the task, affecting eye and hand coordination and, therefore, operating performance. Theis next sections epaper evaluates the impact of diverse types of haptic feedback systems (haptic guidance and warning systems) on driving behaviour performancee, investigates driver behaviour modelling systems, and explores driving behaviour control in the driver–vehicle–road system with and without a haptic feedback system. A prospective model-free control approach is recommended to compensate for human errors and to stabilise the haptic feedback control system with different driving styles.
2. Haptic Warning Systems
A warning haptic is an assistive system alerting the driver when any threshold is exceeded, meaning when the car is driving away from the lane or the centre line. Klauer et al.
[22] analysed the haptic warning in a lane departure warning system (LDWS); the system sent a vibration on the steering wheel to warn the driver when he was out of the lane departure zone. They also analysed the level of recognition of the warning by the driver. The result was that haptic warnings were efficient in unpredicted lane departure, the maximum lateral deviation was reduced to 1.36 m, and the reaction time for unpredicted conditions was shortened
[23]. Enriquez et al.
[24] added a vibratory haptic on the steering wheel, and this system sent a pulsating sensation to alert the driver when any problem was detected. This work showed that the drivers mean response time was faster when using a car with haptic warnings. The system with three levels of haptic warnings improved the reaction time to 71% feedback. Onimaru et al.
[25] developed a warning system with two vibrators mounted on different sides of the steering wheel. The pulsing signal alerted the human driver as soon as the car position moved out of the centre line. Stanley developed haptic warning feedback on the seat belt to warn the driver about a lane departure by providing a vibration on the seat, and the reaction time was reduced from 1.24 to 0.89 s compared to other auditory alerts
[26]. In addition, Kurihara et al.
[27] constructed a vibrotactile device on the pedal that vibrates to alert the driver to a lane departure, and the reaction time was lower for the system with haptic warnings (1.53 s) compared to the system without a tactile system.
Auditory and visual stimuli are not always effective to provide drivers with good information about their surroundings, so a vibrotactile device was developed by Morrell et al.
[28] to convey close surrounding car information to drivers. The experimental results, using a driving simulator, have shown that the driver reaction time deviated from 3.8 s for a haptics warning system to 12.5 s with a system without the vibrotactile device. A haptic warning was mounted on the driver’s belt to assist the driver in dealing with overtaking action
[29]. A vibrotactile system was mounted on a driver’s left foot to warn him about any object lying under the vehicle and to allow him to avoid any accident when parking from behind in
[30].
Many researchers used binary feedback signals mounted to the driver’s seat belt to alert the driver when the maximum reference was noted or when the car was deviating from the lane to avoid collision
[31][32][31,32]. Ahtmad et al.
[33] mounted a haptic warning on the steering wheel and the seat belt to avoid collisions. The study’s outcome indicated a sufficient driver reaction time of 1.4s with a vibrotactile system and 1.6 s without a haptic warning system. De Rosario et al.
[34] proposed a haptic system mounted on the driver pedal to avoid a frontal collision. The results showed that the driver’s response was 0.3 s faster than that of drivers not using a system with visual warnings. Fitch et al.
[35] developed a non-visual crash alert by mounting a tactile system on the driver’s seat to provide information about a potential accident. The results demonstrated a good response time of 0.257 s compared to the auditory system, and the surrounding car position was accurate from 32% to 84%. Ho
[36] conducted a similar study where haptic warning signals were applied to distracted drivers to improve the driver’s visual performance from 24 to 40%. De Groot et al.
[8] proposed a haptic feedback system that vibrates the driver’s seat to announce that the car was deviating from a lane by a threshold more significant than 0.5 m.
From the above survey, haptic warning feedback provides many advantages to driver performance, such as facilitating reaction times that are more rapid than when using a system without haptic warnings, assisting with the driver’s perception of his surroundings, alerting the human driver of any potential collisions, and preventing lane changes and departures. However, some disadvantages were noted, such as the car’s vibration on uneven roads. In this situation, the driver may not sense the steering or seat belt vibrations or the false alarms. In addition, this system did not also consider the driving behaviour during driving when designing the haptic warning feedback.
3. Haptic Guidance In-Vehicle Control
A haptic guidance system is a semi-automation approach that constantly shares steering control with the driver by using a kinematic principle that provides a torque to set the corresponding input to the steering wheel. The applied force indicates the direction of the steering wheel to keep the car’s position in the lane
[11][37][11,37]. Mulder et al.
[38] developed the symmetric representation of the shared haptic control. As illustrated in (
[38], Figure 1), any changes in the system state were captured by the system and human sensors; the desired control inputs
Xopt for the system and
Xdes for the human resulted from the difference between the targets (
refsys,
refhuman), respectively. The system and the human drivers shared control via their inputs and applied forces with
Fsupport,
Fhuman to the control interface
Hpi to control the output
Xsw, which is the direct input to the vehicle. The main beneficial effect of this shared haptic control system was the improvement of lateral errors by up to 35%, and the reduction in the driver control activity compared to manual control.
An experimental study conducted by Griffiths et al.
[39] on 11 drivers showed that haptic guidance applied to the steering wheel enhanced the path direction by 30% and improved the reaction time for a specific task by 18 ms and the visual demand by 29%. Zhao et al.
[40] represented a haptic guidance system where the steering duty is shared between the driver and the haptic system.
Γd,
Γa,
α, and
ρ represented, respectively, the driver steering torque, the haptic guidance torque, the sharing level, and the road curvature as entirely describe in (
[40], Figure 1).
Studies on haptic guidance control have been explored in the in-vehicle control area
[11][15][39][41][42][43][44][11,15,39,41,42,43,44], and the outcome has indicated performance benefits such as reduced workload for visual attention, accurate vehicle control, fast response reaction times, and improved lateral errors.
Some researchers used haptic shared control techniques to assist learners in improving their driving skills. Marshal-Crespo et al.
[45][46][45,46] experimented with a study where they used haptic guidance to teach young, old, and less-skilled drivers to achieve a steering task. The results revealed that learning with haptic guidance could have the benefit of providing durable control of driving skills for young, old, and less-skilled drivers. A hybrid system with haptic guidance and disturbance was proposed to assist the learners in enhancing their steering skills. They achieved their goal by applying torque to the steering wheel, which corrected the lateral error. The haptic disturbance sent force randomly to improve the learner’s steering movement
[47].
However, the conflict between the haptic guidance system torque and the driver was noted when the driver’s steering wheel intention was different from the system. The after-effect matter, which occurs when a driver is expecting force feedback (torque) but the system provides a null field, has been considered.
To reduce the after-effect of the continuous haptic system, Petermeijer et al.
[15] introduced bandwidth guidance to the existing haptic guidance to assist the driver at a certain range. The following Equations (1) and (2) were proposed.
and
Tcontroller,state1 in Equation (
1) was the force applied by the haptic guidance to the system when the lateral position error (
elateral) exceeded 0.5 m. To reduce the after-effect problem,
Tcontroller,state2 and Equation (
2) were activated immediately as
elateral decreased to a value less than 0.1 m, and therefore, the shared control was disengaged. After an experiment conducted with different drivers under diverse conditions, it resulted that haptic continuous guidance and bandwidth guidance had a better performance for lane-keeping and consequently reduced the peak lateral error. Moreover, the two combined systems produced fewer after-effects for the driver.
The conflict between the haptic guidance and driver manoeuvres when directing the car occurs when the haptic guidance torque is too high or too low compared to the driver torque or when the driver steering intention does not match the haptic shared control direction. Abbink et al.
[48] have shown the benefit of including neuromuscular information in the haptic guidance control because drivers need the use of their limbs to steer the wheel. Complimenting the dynamics of the driver’s limbs to the design of the shared control prevented the mismatching problem. Wang
[49] investigated the effect of haptic guidance on driver performances in the different pathways, and the studies showed that due to visual limitations, the haptic guidance augmented performance and reduced driver activities during curve negotiation.
Based on the above surveys, even though shared haptic control contributed to lane-keeping performance, some authors highlighted the conflict between the system and the driver. The effect of haptic guidance on driver vision was noted. The implementation of a driver behaviour model based on neuromuscular dynamic and visual feedback into the shared haptic control system would have solved those problems.
This section reviewed various proposed techniques for addressing the performance of diverse types of haptic assistance mounted in different vehicles’ locations. The performance of these proposed strategies were assessed based on the task, the haptic system type, and the location of the vibrotactile. Table 1 illustrates the performance assessed by comparing haptic warnings and haptic guidance systems to the non-assisted system with statistical meanings obtained by collecting and analysing the data and then using a statistical approach to measure some parameters. The driver time response was also investigated as the performance index. The first value in brackets included in the time response section of Table 1 constitutes the driver reaction time with a haptic system, while the second corresponds to the response time without a haptic system.
Table 1. The performance of the haptic warning and haptic guidance systems against the non-assisted system with statistical significance (M = mean, Max = maximum, RMS = root mean square, SD = standard deviation).
In all research work using haptic warnings as assistance in navigation
[24][25][26][24,25,26], LDWS
[26], and collision
[31][32][31,32] presented a fast response reaction time compared to manual controls. Some studies
[39][44][39,44] indicated that haptic guidance assisted in reducing the drivers’ workload for visual attention to the lateral displacement error and contributed to fast response times in the lane-keeping task. Study
[30][47][30,47] revealed that the haptic guidance provided more torque to improve the learner’s skill in lane-keeping scenarios. Refs.
[38][49][38,49] showed the drivers’ workload and the lateral error were reduced as well when negotiating a curve.
4. Prospective Directions for Developing a Robust Controller Considering Differences in Driving Behaviours in Haptic Systems
Human cognitive behaviours can affect driving activities, such as perception (eyes, skin, muscle), knowledge (training, experience), and decision-making abilities. For example, different drivers have different perceptions and understandings of the objectives in the tasks to be completed, which can affect the eyes and hand coordination and, therefore, the driving performance. However, it is not easy to find a principle that governs driving behaviour and vehicle dynamics, so the mathematical or statistical models used by some researchers are based on assumptions. This leads to uncertainties when these assumptions are not satisfied in real applications. An artificial neural network, or a model-free approach, could be more suitable for modelling complex non-linear systems, such as driving behaviour with more real or experimental input–output data.
The driving behaviour modelling approach, and the driving behaviour controller (The steering wheel angle control) with a haptic feedback system analysed from the literature have perfectly matched with and improved the steering wheel performance. However, challenges such as false alarms, vibrations on uneven roads, and the lack of an accurate driving behaviour model adversely impacted its performances. Furthermore, mathematical principles, statistical approaches, and the lack of consideration of the individual differences in a driver–vehicle–road system make the modelling and the controller less robust and inefficient for diverse-driving-style optimisation. Therefore, it is essential to design a model-free compensation system considering the driving behaviour model, with the individual differences of drivers taken into account, which predicts the real intention and implements it into a haptic system.
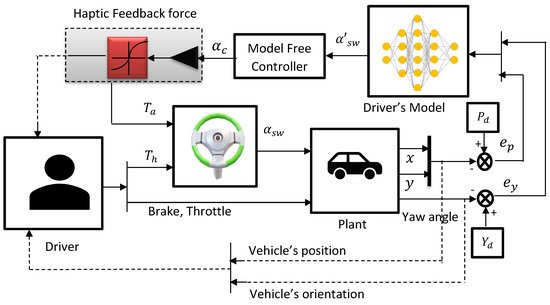
Figure 18 represents the prospective model where the model-free controller inputs are fed by a neural network that was mapped by the inputs (lateral position (
ep and yaw angle error
ey) and output (steering wheel angle (
αsw), throttle, brake) of the human object. The steering wheel angle
α′sw resulting from the NN is included in a model-free compensating system. The controller is then trained to provide the corresponding steering wheel angle
αc which will then tune a haptic feedback torque to correct the existing errors (displacement error, yaw angle error) due to uncertainties. The future recommended model composites a hybrid human-in-the-loop system. It could be necessary to synthesise such a system in the view of control system theory to ensure the system performances, such as transparency and robustness.
Figure 18. Proposed driver behaviour controller model with haptic feedback system.
5. Discussion
Theis above sections paper discussed and presented an analysis and comparison of different haptic systems’ impact on driving behaviour performance. The driving behaviour modelling system was investigated and the driver behaviour control in the driver–vehicle–road system with and without haptic feedback was explored. The outcome of the studies indicated that the haptic warning system mostly used vibration as the transmission signal, while haptic guidance used a shared control force feedback. Moreover, the haptic feedback was applied to the drivers to enhance their driving performance (reducing the lateral displacement errors and the orientation deviation), lower the response time, and reduce the mental workload (awareness of surroundings, lane departures, collision prevention). However, false alarms, vibrations on uneven roads, and the lack of an accurate driving behaviour model adversely impacted its performance. The conflict between the haptic guidance system torque and the driver was noted when the driver’s steering intention differed from the assistive system. In addition, the after-effect matter, which occurs when a driver is expecting force feedback (torque), but the system provides null, has been considered.
Implementing the driving behaviour model based on neuromuscular dynamic and visual feedback into the shared haptic control system has improved the driving performance and significantly reduced the driver and haptic guidance conflict. Although the investigation results of the techniques used to model driving behaviour have presented promising results, such as perfect matches, the models based on the mathematical model are less robust due to the many assumptions made by them. Statistical approaches, such as the hidden Markov model (HMM)HMM using the sequence of necessary action to represent driving behaviour, were based on the actual and future state, but did not consider the past state. HMMs, combined with other techniques, were proposed to fulfil the lack of not using past input information. The artificial neural networks developed to mimic the driving behaviour were attended to meticulously. However, the model’s lack of real data and vulnerability to sudden lane changes was noted.
This overview extensively discussed different driving behaviour models and controllers with and without haptic feedback. Despite the fact that fast response times and stability and displacement errors were obtained based on the optimisation technique, some proposed controls for enhancing driving behaviour deviations based on mathematical principles were less robust due to the many assumptions that were applied. Moreover, the lack of consideration of the individual differences in a driver–vehicle–road system makes the controller less robust and less efficient for different driving styles.
Thus, a prospective model-free controller was proposed which considered the drawbacks discussed in the literature to enhance the driving behaviour control’s performance (transparency and robustness), considering the differences in driving style (various steering wheel angles, yaw angle, velocity). Furthermore, it is necessary to synthesise such a system in the view of control system theory to ensure the system performances, such as transparency and robustness, which is to be covered in our future works.