Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 2 by Jessie Wu and Version 1 by Tao Lei.
In the “all-electric” concept, where pneumatic and hydraulic power systems are eliminated to improve aviation costs and environmental impact, the dynamics of electrical power balance are to be characterized and managed to avoid excessive peaks with respect to generators’ limited capabilities. Especially for electric propulsion aircraft (EPA), the thrust force can be partly or completely provided by an electric power system. With the development of power electronics, the HVDC system is becoming a trend for MEA/AEA and EPA. How to realize the effective allocation between the multi-energy onboard for aircraft, The architecture and strategies of energy management is very important.
- All-Electric Aircraft
- EPA
- power systems
1. Energy Management Optimization and Power Control Question Formation
Increasingly stringent demands have been placed on aircraft power systems. Larger power volume, higher efficiency, and a sufficient cooling capability are required, with constraints such as weight, physical volume, and power density. Coordinated control between thermal and electrical power system is very necessary for managing the generation units, distribution units, and consumption of power onboard the aircraft. Coordinated power control and energy management can benefit from reducing the gap between performance demands and capabilities of current generation aircraft, or contributing to improve the capability for the design and sizing of next generation aircraft. Furthermore, an aircraft is a system of systems with various energy flow being converted and consumed between multiple energy systems, as shown in Figure 1. The power flow in an aircraft coupled with thermal energy is very complex [62[1][2],63], and dynamic time scales from the sub-millisecond electrical voltage regulation to the minute level control for fuel tanks and passenger cabins are shown in Figure 2. Therefore, it is essential to design an optimization model and controller structures that can cope with the temporal and spatial disparity that exist within these complex power systems. The modeling of the power system in aircraft is a challenging task because of the disparity. Except for the volume and weight constraints, the optimization model for aircraft energy and power systems must be derived regarding many constraints such as the generator power limits, thermal capability, battery’s SOC, and PV power source power limitations [80][3]. Therefore, the power management architecture and strategies are also very important to realize energy generation and distributed optimization in aircraft. The problem of energy optimization and power control is basically a multi-spatiotemporal scale optimization problem with different constraints.
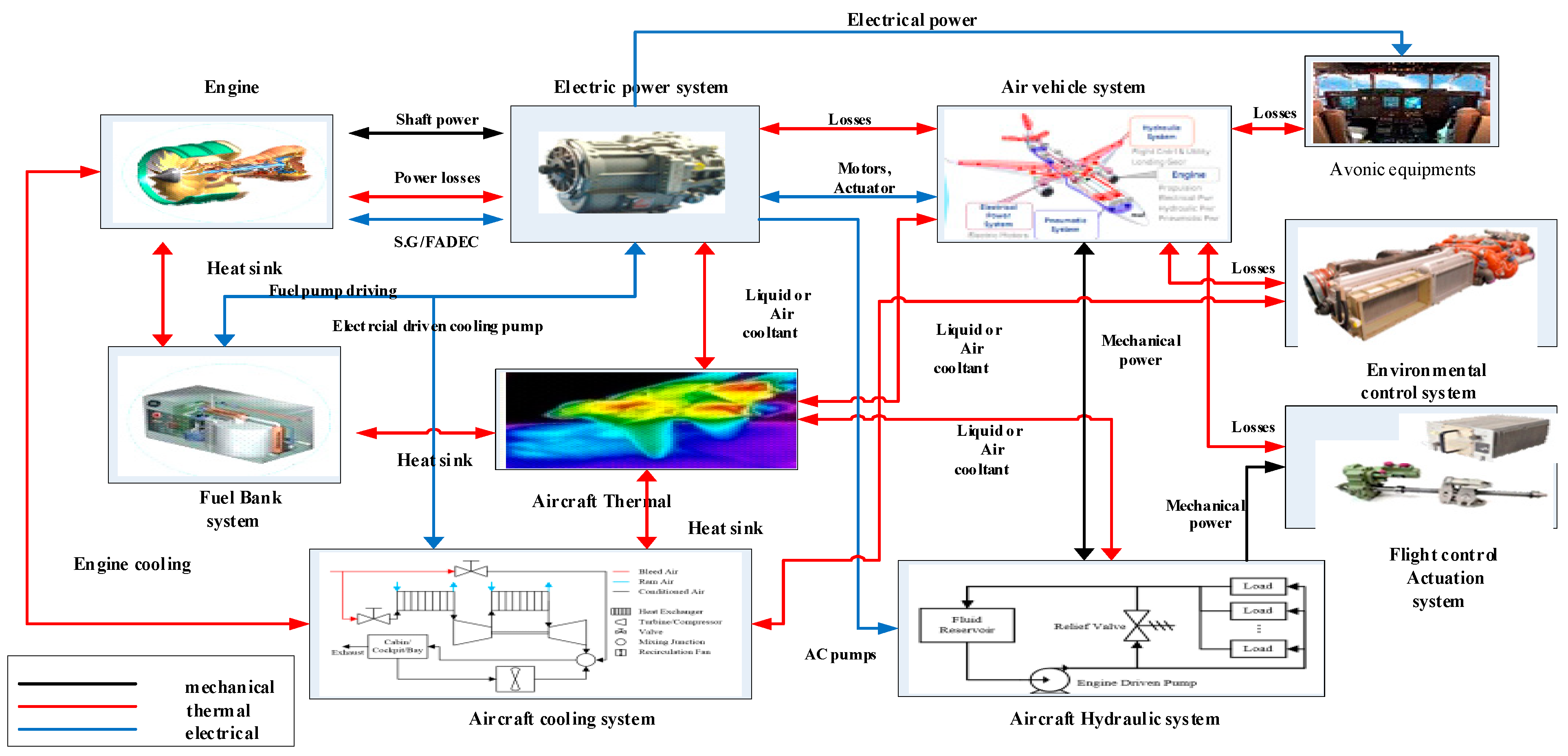
Figure 1.
The multi-energy domain interactions in an aircraft power system.
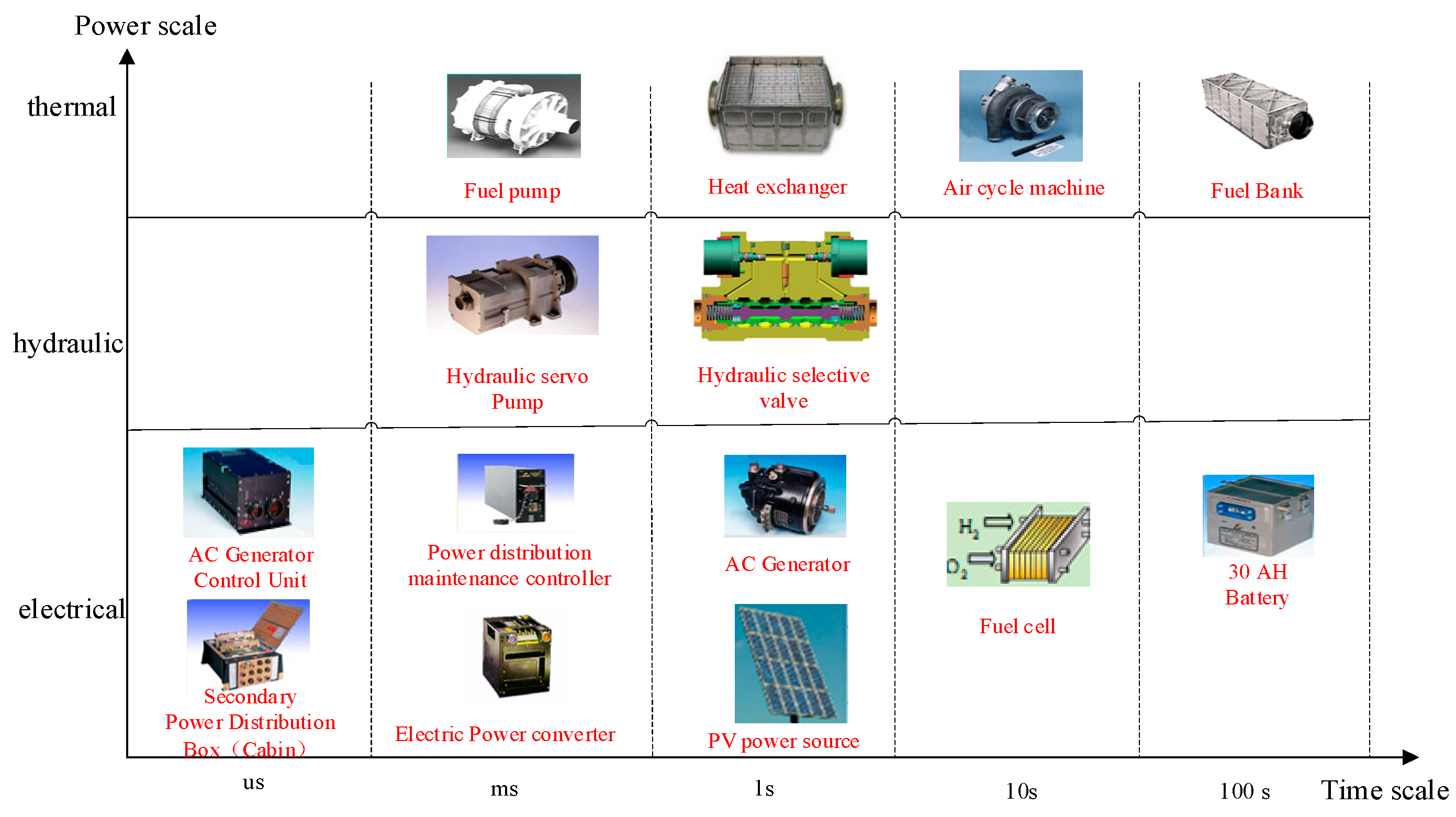
Figure 2.
Temporal scale separation of major thermal, hydraulic and electrical system devices in aircraft.
The energy dynamic management and control needs some special technology to be realized; the optimal control theory is often used with PMP and dynamic programming (DP). PMP is a common optimal method; it overcomes the defect that the variational method cannot find the extremum of constrained control variables and objective functions [81][4]. Compared with the dynamic programming algorithm, its computation is greatly reduced, but it is still only used in offline situations. In the process of energy management strategy research of electric power systems, the performance index of the energy management system, with the constraints described above, is transformed into a Hamilton function minimization problem [82[5][6],83], so as to obtain the optimal trajectory of control quantity. DP applies to the case in which the optimization strategy is based on dividing the problem into smaller sub-problems. DP strategy has been used by many scholars to develop a hybrid energy flow management strategy, and is recognized as a relatively ideal hybrid energy management method [84][7]. The results are often used in the offline optimization management calculation of fixed working conditions, and are also used to evaluate the merits of other control algorithms for energy management.
Table 1 presents the energy optimization index of the aircraft power system. The optimization index or multiple optimization objectives can be combined as the optimization objective function, and the multi-objective optimization model of the electric propulsion power system can be formed by combining the constraints of working characteristics and environmental constraints of different electric power systems.
Table 1.
Optimization index of different electric power architecture.
| Energy and Power Architectural Form | Performance Index of Optimization Function |
|---|---|
| All types of electric power system architecture | The highest overall efficiency of the power system |
| Strong robustness, reliability, and fault tolerance | |
| Minimal emissions of pollutants such as carbon dioxide | |
| Lithium battery, fuel cell hybrid electric propulsion architecture | The longest service life of lithium batteries and fuel cells |
| Fuel cell, oil gas, battery hybrid-electric propulsion architecture | Minimization of fuel or hydrogen consumption |
| Solar and fuel cell electric propulsion architecture | Longest flight range and flight time |
2. Energy and Power Management System Structure and Architecture
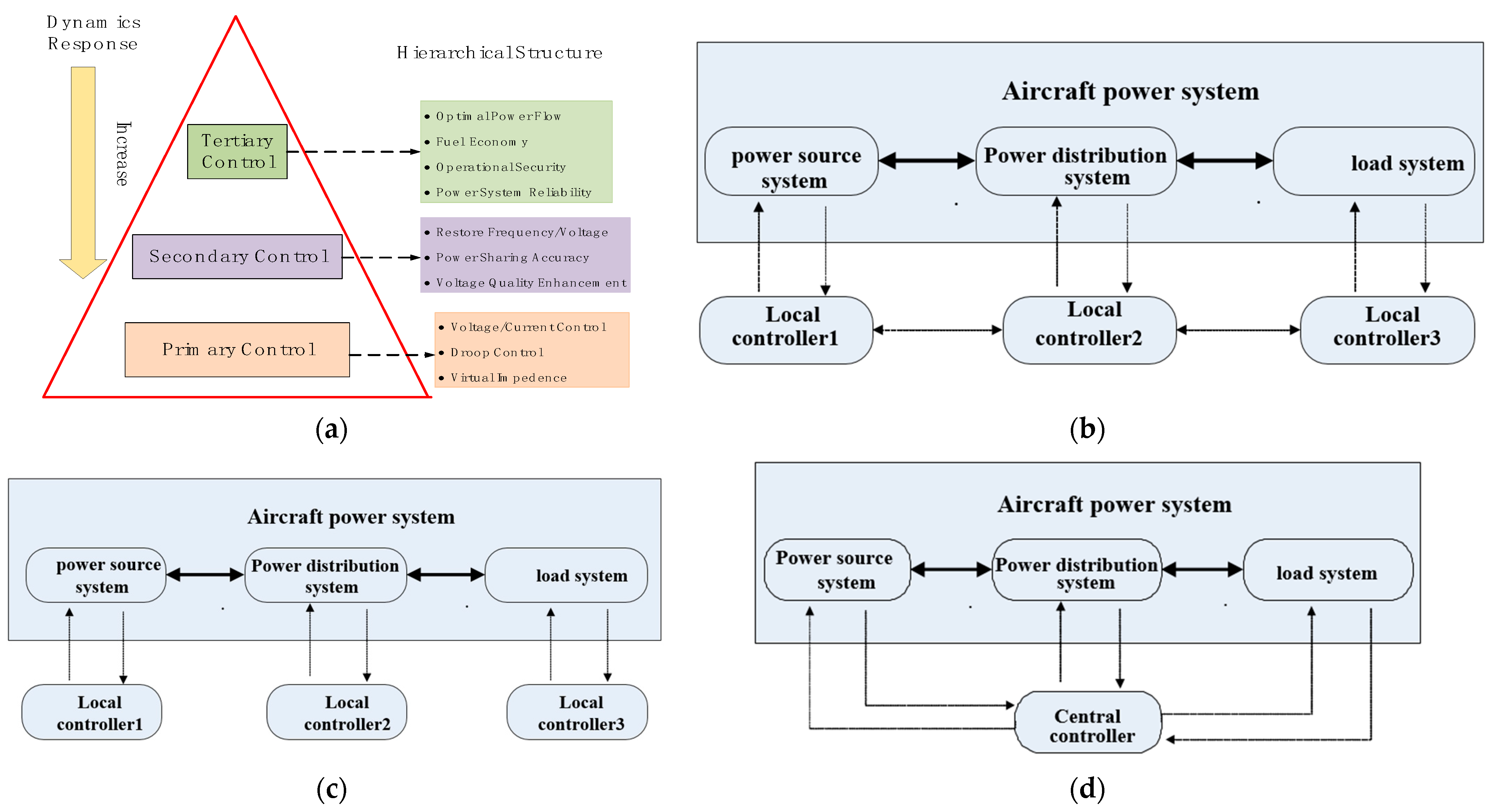
The energy and power management problems in aircraft are often realized by the electrical power system because of the trend of More Electric and All-Electric Aircraft, especially for the electrical propulsion aircraft (EPA). So the architecture of the power system can become microgrids, similar to the terrestrial microgrid system. In order to describe the architecture of onboard microgrids in aircraft, the different kinds of the architecture of microgrids in aircraft are presented in Figure 3. There are a variety of architectures for the aircraft onboard microgrid, such as star architecture, multiple-star architecture, ring architecture, and hybrid architecture. In order to get the best architecture for a reliable electric power supply, evaluation methods for the aircraft onboard microgrid are needed to evaluate the performance of different architectures according to certain criteria. The criteria include energy system efficiency, reliability, and fuel consumption economy. The evaluation and selection of the most appropriate aircraft power system architecture is an interactive process, made of multiple trade-offs, detailed analyses using requirements and constraints as the input variables, and detailed analysis to feed a decision matrix that is used to compare the different architectures against the functional objectives. In considering the electrical propulsion needs, the load demand must be considered with the electrical propeller load characteristics. The energy management of the power system is referred to as the long time interval energy optimization problem, which can include the above criteria. The power management of the power system is relative to the short time scale and transient time power response optimization problem, which can include the system stability, transient power response, power quality, and fault protection. Moreover, aircraft microgrids have a variety of power supply types, operating and protective modes, control topologies, and power distribution network structures, which can strongly impact their dynamic characteristics, so it is very challenging to develop an accurate, complete energy, and power management model and strategies. The hierarchical microgrid energy and power management system contains three layers to achieve different control objectives: Level 1, for generation processes based on internal control, response speed, and for system stability based on the primary control; Level 2, for high power quality and power sharing based on the secondary control; Level 3, for power economic dispatching management based on the tertiary control, system reliability and economic planning based on policy control. This situation can be shown in Figure 4a.
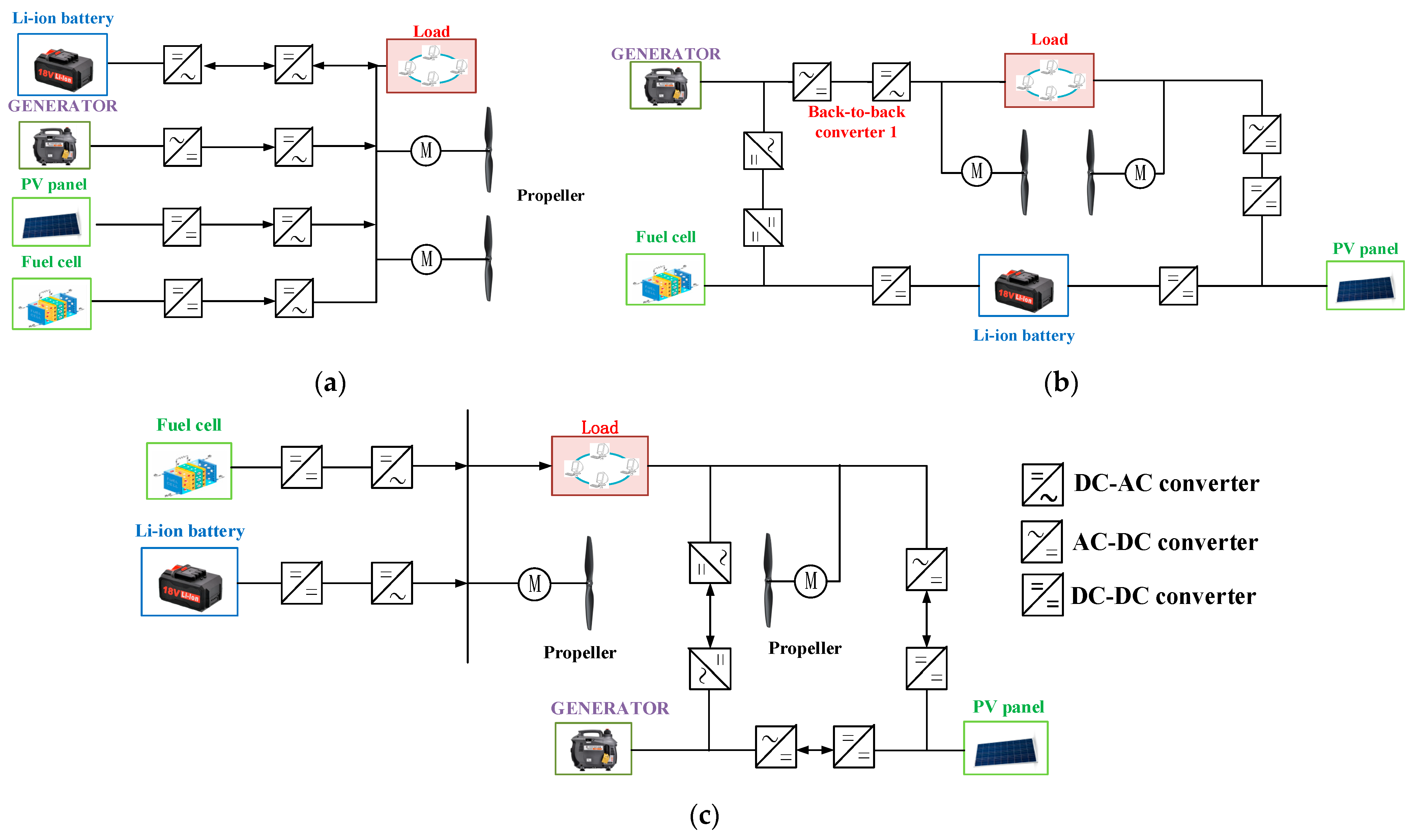
Figure 3. The different architecture of electrical power system in aircraft microgrid. (a) The star architecture of aircraft microgrid structure; (b) The ring architecture of aircraft microgrid structure; (c) The hybrid architecture of aircraft microgrid structure.
Based on the optimal energy management and power system architecture, the dynamic power management strategies were very important for the operation of the aircraft power system. It is proposed to apply distributed control strategies to the power systems of aircraft, which allow information exchange among local controllers by establishing a communication network topology among them. In fact, distributed control strategies can be considered as a trade-off between centralized control and decentralized control by combining their advantages [85][9]. In aircraft, local subsystems are assumed to be developed independently by competing entities and companies, requiring that any coordination must consider the privacy of the controllers and account for differences in their update rates [86][10]. It is assumed that the subsystems are developed and manufactured by subcontractors who are potentially in competition with each other across various developing projects. Thus, the design details of the subsystems and their controllers may be regarded as intellectual property (IP) and their designers would be unwilling to using model-based coordination that could risk exposing it. Therefore, distributed control is better than centralized control methods just to exchange some interactive information or variables. For decentralized control architecture, the optimal performance of energy management is not as good as distributed control because of the absence of exchange information between subsystems [84][7]. Therefore, it is necessary to choose the proper controller architecture according to the energy system’s dynamic state trajectory and control input decision variations.
In Figure 4a, The tertiary control is mainly for the onboard microgrid energy optimal distribution among different power sources, with the power consumption minimization, and fuel economic optimal dispatch, with an additional object such as power stability, safety, and fault tolerance. The real and reactive power sharing accuracy is deteriorated when the ratio of line-resistance-to-line-reactance is high in an aircraft power system. The secondary control is proposed and applied to solve such problems. Its main objective is to restore the frequency and voltage to their nominal values in the aircraft ac power system. Additionally, appropriate control methods are also proposed to enhance the voltage quality including compensating for the voltage unbalance and harmonic distortion in the secondary control.
In aircraft power systems, the different power source subsystems such as an electrical generator, fuel cell, storage energy power system such as a lithium battery, and super-capacitor have different time and spatial scale dynamic characteristics. The centralized controller architecture is prone to single point fault from the different subsystem controller. The controlling real-time characteristic is very important for microgrid of aircraft. The typical management and controller architecture of power systems in aircraft can be shown in Figure 4b–d. Figure 4b shows the distributed controller architecture. Figure 4c shows the decentralized controller architecture. Figure 4d shows the centralized controller architecture. With more penetration of electrification in the aircraft power system, the linkage between different power electric subsystems is greater, and they are more interrelated with each other. The controller architecture for each subsystem must be chosen by considering different factors with the dynamic characteristic, communication capability, time scale, and exchanged information. The distributed energy and power management architecture is more promising as a multi-agent system for future controller architecture because of the reliability and safety benefit for power systems. Also, for the aircraft electric load system, during some typical operating scenarios such as the actuation of flight surfaces during takeoff, and performing evasive high-thrust turns while using DEW shots for a military aircraft or a hybrid-propulsion craft accelerating through both a jet engine and electric motors, all these operating modes can cause a large power transient and voltage bus stability issues. To mitigate the power disturbance from fast variation of power demand, controller’s architecture, or control or energy management strategies can be used.
3. The Strategies of Energy and Power Management
Traditionally, energy and power management strategies for power systems can be classified into two types: rule-based heuristic methods and optimization based methods. The dynamic energy optimization and power management is also very important for the micro grid in an aircraft [87][11]. As discussed above, renewable energy source integrated with the traditional aircraft EPS can improve the energy efficiency and reduce the oversize of electrical generators. However, the intermittent characteristic and electrical–chemical response from renewable energy make the power optimal distribution more complex. The load electrical power demand is very closely coupled with the flight control system, which often varies abruptly in different flight stages such as takeoff or landing. The stochastic changes in aircraft electric propulsion load makes the optimal power distribution control very difficult.
With the development of electrical propulsion and hybrid electrical propulsion aircraft, the aircraft power system can be viewed as a “multi-energy mobile microgrid.” It is distinct from the land-based microgrid and has multiple energy transformations, which are subject to complicated flight condition constraints, and its flight durability fully depends on its energy utilization efficiency [83][6]. While most of the existing research works focus on the hybrid-electric propulsion aircraft (HEPA)’s real-time power balancing control, rare research works have been reported on its energy optimization problem [88][12], i.e., how to optimally schedule its energy consumption to achieve the best techno-economic performance. This is also an advanced research topic for the aircraft power system. The energy management strategies must be designed with multi-disciplinary optimization contents. The following table lists the main energy and power management methods onboard with different control and optimization objects according to different platforms of the aircraft. The summarized energy and power management methods for different aircraft platforms are presented in Table 2.
Table 2.
The summarized energy and power management methods for different aircraft platforms.
| Energy and Power Management Strategies | Aircraft Platform | Control and Optimization Objective | Features | Reference Paper |
|---|---|---|---|---|
| Rule-based | UAV, Aircraft APU system; More electric engine |
Fuel or hydrogen consumption minimization | State machine; Power distribution based on expert experience |
[50,51,71,89,90,91][13][14][15][16][17][18] |
| Fuzzy logic | UAV, Aircraft APU system, Aircraft HVDC | Hydrogen consumption minimization, voltage stability | FLC to specific flight profile or APU load demand | [53,71,89,92][15][16][19][20] |
| Hybrid electrical propulsion UAV | Fuel Consumption minimization | Equivalent consumption minimization strategy plus FLC |
[93][21] | |
| Fuel cell UAV | Hydrogen consumption minimization, voltage stability | PSO+FLC | [81,87][4][11] | |
| Meta-heuristic | Aircraft emergency power system | Less hydrogen consumed; Optimal life time of electrical sources; |
Artificial bee colony algorithm; Grey wolf optimization algorithm |
[94][22] |
| MPC-based | Hybrid-electrical propulsion aircraft | System efficiency Fuel-consumption Voltage stability |
Conventional MPC | [66,[2395]][24] |
| Aircraft APU system | System efficiency | Traditional MPC | [89][16] | |
| Aircraft distributed power system | Minimum switching of generator and power load shedding; power quality, minimization of THD | Stochastic MPC; INA-SQP MPC |
[47,96][25][26] | |
| Aircraft energy storage system | Reduce the DC bus voltage transient; Minimization of current draw from the storage system |
SQP solver | [78][27] | |
| MEA power system with PV | Stability of system; Steady and transient state Current control |
FCS MPC + stability constraining dichotomy solution | [97][28] | |
| MEA Electrical power system and Fuel thermal management system | Fuel consumption minimization; Increased capability of thermal management |
Hierarchy MPC control with thermal coupling | [98,99][29][30] | |
| Engines and electrical generation system in MEA | Fuel efficiency and emissions |
Distributed MPC with ADMM algorithm | [86][10] | |
| DP | Small-size aircraft, UAV | Fuel consumption minimization | Lookup-table | [65][31] |
| Parallel hybrid-electric aircraft | Total mission fuel burn minimization over the flight envelope | Offline optimization | [100][32] | |
| MEA power distribution system | Power loss minimization Amount of switching is minimized |
Optimal reliability configuration | [48][33] | |
| Adaptive energy management (ADP or RL) |
more electrical aircraft with pulse load | Lowest possible rate of change of the main source of power or offers a fixed minimum rate of change in power |
Integrated variable rate-limit of power | [101][34] |
| Electrical power system in MEA | Optimization problem for power scheduling and allocation; minimize the fluctuation in power generation system; bus voltage regulation | Optimal adaptive control with MIQP, off-policy integral reinforcement learning | [82][5] | |
| Electrical emergency power system in MEA | Fuel consumption and overall efficiency optimization under the false data injection attack and denial of service attack from the critical measurements | Adaptive neuro-fuzzy inference system and specific fuzzy deep belief network | [102][35] | |
| Fuel cell electric UAV | Hydrogen consumption and battery lifetime | ADP and RL | [103][36] | |
| Power decoupling methods based on filter frequency |
Aircraft Fuel cell and battery hybrid emergency power system | Voltage stability; Minimization of power loss; Extend the lifetime of power source; |
Slow power response for fuel cell; Fast power response for battery |
[11][37] |
| Optimal control and PMP |
All electrical Propulsion Aircraft | Combination of time-related and battery charge costs | Pontryagin’s Minimum Principle | [83][6] |
| Hybrid electrical aircraft | Minimization of fuel consumption with thermal management for the battery pack | Pontryagin’s Minimum Principle | [104][38] | |
| Combinatorial optimization | MEA aircraft ECS system |
Electrical consumption minimization | MILP | [46][39] |
| MEA Power distribution |
Three-phase load balanced; Increase the lifetime of power converter |
Nonlinear optimization; Convex optimization |
[51,105][14][40] | |
| UAV | Flight mission planning and recharging optimization | SDP and QP | [106][41] | |
| UAV | Minimize the fuel consumption (FC) and polluted gas emission | Bender decomposition-based method; (MIQP) | [107][42] | |
| MEA power generation and distribution system | Optimal power allocation; Optimal generator sizing |
MILP | [108][43] | |
| MEA low voltage distribution system | Load allocation on the EPS | Knapsack problem | [67][44] | |
| Droop control methods | Aircraft HVDC system | DC bus stability | Active stabilization methods, load sharing | [70,109,110][45][46][47] |
| Aircraft APU | Dynamic response for power allocation optimization | Virtual impedance Droop control |
[72][48] |
From the above Table 2, energy and power management strategies are presented for a power generation system, power distribution system, and load-side control onboard. The load-side control is similar to the demand-side management (DSM) in terrestrial microgrid. Rule-based, fuzzy logic and MPC-based energy management strategies are often used for UAV, MEA, and EPA. The dynamic transient power management strategies are mainly relative to droop control methods. A new dynamic optimization strategy for energy management of More Electric Aircraft based on hybrid systems theory was examined in the paper [66][23]. An expressive MPC framework is developed to address the pertinent issues for energy management in aircraft systems, creation of optimization metrics, implementation of necessary computational tools, and initial verification through simulation. A hierarchical model predictive control (MPC) framework was presented in the paper [95][24] for hybrid power or electrical propulsion systems that can be used in future energy-optimized aerospace systems. This framework can cover a wide bandwidth of model fidelity and enforce all necessary physical laws in the models using both MPCs together. State variable constraints are explicitly included in the controller formulation by using the equality constraints (i.e., discrete time model or system state transfer equations) to transform the state constraints into the control constraints. The hierarchical MPC framework allows operational constraints to be assigned to different levels of MPC schemes. Simulation results show that the hierarchical control system operates well in optimizing for both energy flow and dynamic current/voltage regulations under the dynamic conditions of the aircraft power system.
In the optimization of energy management for the aircraft power system, the complex system’s state must be aggregated to overcome the problem of “curse of dimension” of DP. In addition, The traditional EMS, including MPC, is prone to the uncertainty or variation of the power system’s model, This can further deteriorate the performance of EMS. The model-free and AI-based EMS can effectively solve this problem. Therefore, reinforcement learning or approximated dynamic programming (ADP) can be applied to the optimization problem of the aircraft power system. The optimization value function can be approximated by different methods such as TD, NN methods to fetch. Some probability functions can be used to describe the stochastic characteristic of the power source and load variation for EPA. Deep reinforcement learning (DRL) is presented in [111][49] to develop EMSs for a series of HEVs. Due to DRL’s advantages of requiring no future driving information in derivation, good generalization in solving energy management problems can be formulated as a Markov decision process (MDP). As shown in Figure 5, The overall schematic of the proposed energy management method also can be realized for electric propulsion UAV. Generally, the implementation of this method is divided into three stages: This period is the training of EMSs. For the EPA, the EMS here is represented by a neural network, and the DDPG algorithm is adopted to update parameters of the EMS in a simulation environment. The update is based on data (state, action, reward) generated by iterative interactions among the hybrid electric UAV model, its history flighting cumulative trajectory information, flighting environment and EMS. When the training result achieves convergence, parameters and the structure of the neural network are saved as the trained EMS. The downloaded EMS can be directly used for online applications by simply mapping state-to-actions for energy optimization objects of the aircraft power system. The uncertainty and stochastic characteristic from the renewable energy and power load in the aircraft must be considered while designing the energy management strategies. The energy management strategies based on stochastic ADP methods were presented in tethered microgrid and a vehicle powertrain. These methods also can be extended to the aircraft microgrids [103][36].
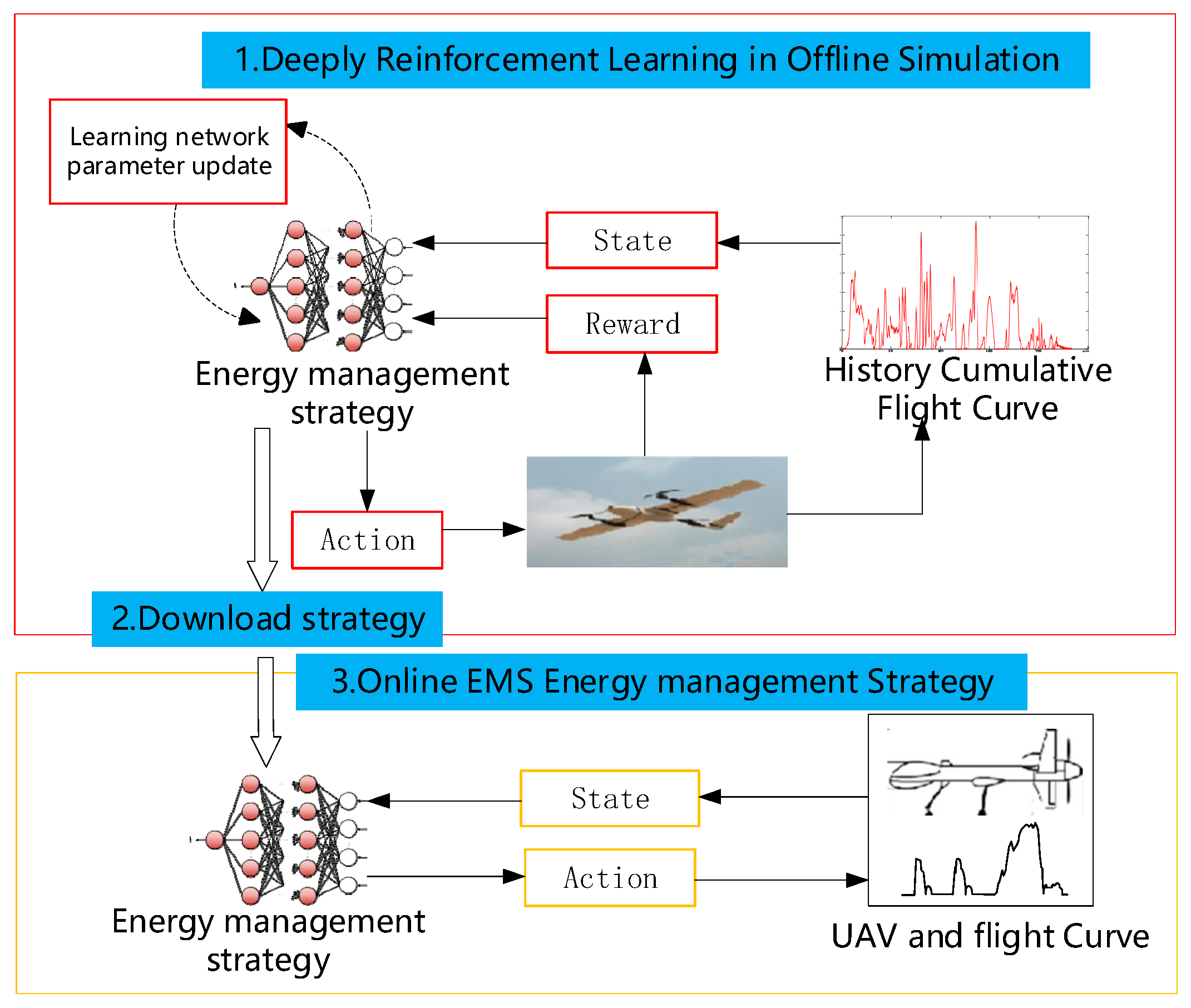
Figure 5. The overall schematic of DRL-based EMS for the UAV model.
For the electrical propulsion UAV or aircraft, the flight load power demand is stochastic in nature because of the external disturbance from wind turbulence or wind shear. In Figure 6, The flight dynamic power variation can be analyzed by the air dynamic flight equation of UAV which can describe the thrust power. The total thrust power includes the steady state thrust power and dynamic thrust power, in which the air density, area of airfoil, lift-to-drag ratio, climb angle, and roll (bank) angle can be integrated into the thrust force power equation. The experimental flight data such as the power demand of UAV can also be measured to verify the data from the digital simulation model. The transition between flight power demand can be regarded as the Markov decision process. Then, the probability model for the thrust power for UAV can be built with the nearest neighborhood methods; the transition probability matrix for the electrical propulsion power can be given for a three-dimensional dataset. The stochastic optimization model for the EMS of UAV can be derived according to Figure 6 to realize the optimal distribution of the energy of the powertrain with the Q-learning methods in reinforcement learning strategies for EPA. For large-and medium-size civil EPA, the power rating will increase greatly, so the thermal constraints caused by the power loss must be integrated with the EMS for the aircraft power system. This challenging topic must be tackled in EMS design.
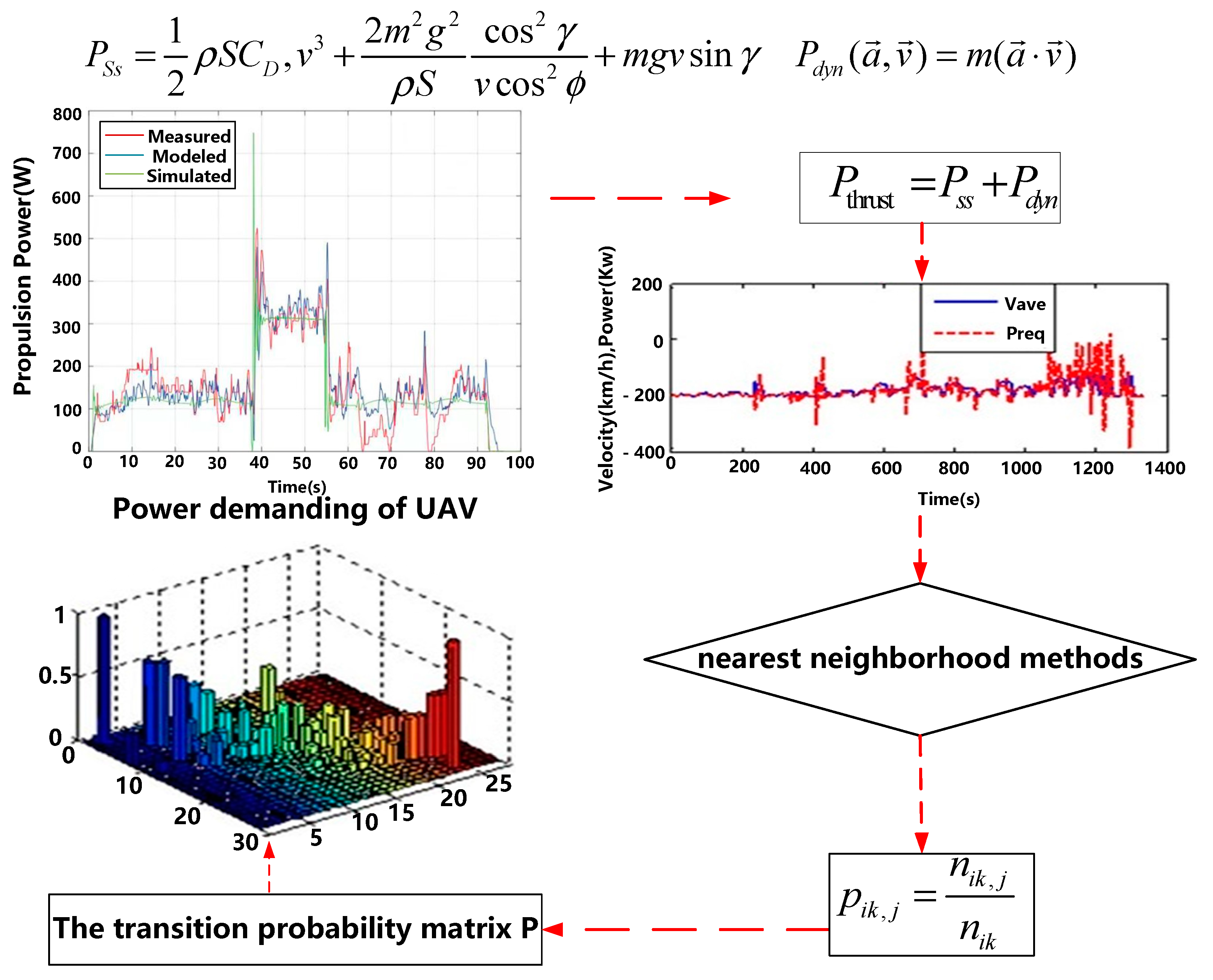
Figure 6.
The probability matrix of load power demand for EMS strategy of the electrical propulsion UAV.
References
- Williams, M.A. A Framework for the Control of Electro-Thermal Aircraft Power Systems. Ph.D. Thesis, University of Illinois, Urbana-Champaign, IL, USA, 2017.
- Williams, M.; Sridharan, S.; Banerjee, S.; Mak, C.; Pauga, C. PowerFlow: A Toolbox for Modeling and Simulation of Aircraft Systems. In Proceedings of the SAE AeroTech Congress and Exhibition, AEROTECH 2015, Seattle, WA, USA, 22–24 September 2015. SAE Technical Paper 2015-01-2417.
- Schettini, F.; Denti, E.; di Rito, G. Development of a simulation platform of all-electric aircraft on-board systems for energy management studies. Aeronaut. J. 2017, 121, 710–719.
- Zhou, Y.; Tao, L. The Testing Platform of Hybrid Electric Power System for a Fuel Cell Unmanned Aerial Vehicle. In Proceedings of the 2018 IEEE International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference (ESARS-ITEC), Nottingham, UK, 7–9 November 2018.
- Zhang, Y.; Yu, Y.; Su, R.; Chen, J. Power Scheduling in More Electric Aircraft based on An Optimal Adaptive Control Strategy. IEEE Trans. Ind. Electron. 2020, 67, 10911–10921.
- Wang, M.; Mesbahi, M. Energy Management for Electric Aircraft via Optimal Control: Cruise Phase. In Proceedings of the Aiaa Propulsion and Energy Forum, Virtual, 24–28 August 2020.
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. A critical review on unmanned aerial vehicles power supply and energy management: Solutions, strategies, and prospects. Appl. Energy 2019, 255, 113823.
- Saenger, P.; Devillers, N.; Deschinkel, K.; Péra, M.C.; Couturier, R.; Gustin, F. Optimization of Electrical Energy Storage System Sizing for an Accurate Energy Management in an Aircraft. IEEE Trans. Veh. Technol. 2017, 66, 5572–5583.
- Guo, F.; Wen, C.; Song, Y. Distributed Control and Optimization Technologies in Smart Grid Systems; CRC Press: Boca Raton, FL, USA; Taylor & Francis Group: Boca Raton, FL, USA, 2017.
- Dunham, W.; Hencey, B.; Girard, A.R.; Kolmanovsky, I. Distributed Model Predictive Control for More Electric Aircraft Subsystems Operating at Multiple Time Scales. IEEE Trans. Control. Syst. Technol. 2020, 28, 2177–2190.
- Tao, L.E.I.; Zhou, Y.A.N.G.; Zicun, L.I.N.; Zhang, X. The state of art on energy management strategy for hybrid-powered unmanned aerial vehicle. Chin. J. Aeronaut. 2019, 32, 1488–1503.
- Xie, Y.; Savvarisal, A.; Tsourdos, A.; Zhang, D.; Gu, J. Review of hybrid electric powered aircraft, its conceptual design and energy management methodologies. Chin. J. Aeronaut. 2021, 34, 432–450.
- Terorde, M.; Wattar, H.; Schulz, D. Phase Balancing for Aircraft Electrical Distribution Systems. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1781–1792.
- Terorde, M.; Schulz, D. New Real-Time Heuristics for Electrical Load Rebalancing in Aircraft. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1120–1131.
- Motapon, S.N.; Dessaint, L.A.; Al-Haddad, K. A comparative study of energy management schemes for a fuel-cell hybrid emergency power system of more-electric aircraft. IEEE Trans. Ind. Electron. 2014, 61, 1320–1334.
- Motapon, S.N.; Dessaint, L.A.; Al-Haddad, K. A robust H2 consumption-minimization-based energy management strategy for a fuel cell hybrid emergency power system of more electric aircraft. IEEE Trans. Ind. Electron. 2014, 61, 6148–6156.
- Lee, B.; Kwon, S.; Park, P.; Kim, K. Active Power Management System for an Unmanned Aerial Vehicle Powered by Solar Cells, a Fuel Cell, and Batteries. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 3167–3177.
- Kratz, J.L.; Culley, D.E.; Thomas, G.L. A Control Strategy for Turbine Electrified Energy Management. In Proceedings of the AIAA Propulsion and Energy 2019 Forum, Indianapolis, IN, USA, 19–22 August 2019.
- Donateo, T.; De Giorgi, M.G.; Ficarella, A.; Argentieri, E.; Rizzo, E. A General Platform for the Modeling and Optimization of Conventional and More Electric Aircrafts. In Proceedings of the SAE 2014 Aerospace Systems and Technology Conference, Cincinnati, OH, USA, 23–25 September 2014. SAE Technical Paper 2014-01-2187.
- Zhang, H.; Mollet, F.; Saudemont, C.; Robyns, B. Experimental validation of energy storage system management strategies for a local DC distribution system of more electric aircraft. IEEE Trans. Ind. Electron. 2010, 57, 3905–3916.
- Xie, Y.; Savvaris, A.; Tsourdos, A. Fuzzy logic based equivalent consumption optimization of a hybrid electric propulsion system for unmanned aerial vehicles. Aerosp. Sci. Technol. 2019, 85, 13–23.
- Zhao, J.; Ramadan, H.S.; Becherif, M. Metaheuristic-based energy management strategies for fuel cell emergency power unit in electrical aircraft. Int. J. Hydrogen Energy 2019, 44, 2390–2406.
- Yasar, M.; Kwatny, H.; Bajpai, G. Aircraft Energy Management: Finite-time Optimal Control with Dynamic Constraints. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Kissimmee, FL, USA, 5–9 January 2015.
- Jiang, Z.; Raziei, S.A. Hierarchical Model Predictive Control for Real-Time Energy-Optimized Operation of Aerospace Systems. In Proceedings of the AIAA Propulsion and Energy 2019 Forum, Indianapolis, IN, USA, 19–22 August 2019.
- Shahsavari, B.; Massoumy, M.; Sangiovanni, A.; Horowitz, R. Stochastic Model Predictive Control Design for Load Management System of Aircraft Electrical Power Distribution. In Proceedings of the American Control Conference (AACC), Palmer House Hilton, Chicago, IL, USA, 1–3 July 2015; pp. 3649–3665.
- Nademi, H.; Burgos, R.; Soghomonian, Z. Power Quality Characteristics of a Multilevel Current Source with Optimal Predictive Scheme From More-Electric-Aircraft Perspective. IEEE Trans. Veh. Technol. 2018, 67, 160–170.
- Herrera, L.; Tsao, B. Analysis and Control of Energy Storage in Aircraft Power Systems with Pulsed Power Loads. SAE Int. J. Aerosp. 2016, 9, 8.
- Ma, Z.; Zhang, X.; Huang, J.; Zhao, B. Stability-Constraining-Dichotomy-Solution-Based Model Predictive Control to Improve the Stability of Power Conversion System in the MEA. IEEE Trans. Ind. Electron. 2019, 66, 5696–5706.
- Koeln, J.P. Hierarchical Power Management in Vehicle Systems. Ph.D. Thesis, University of Illinois at Urbana-Champaign, Urbana-Champaign, IL, USA, 2016.
- Koeln, J.P.; Pangborn, H.C.; Williams, M.A. Hierarchical Control of Aircraft Electro-Thermal Systems. IEEE Trans. Control. Syst. Technol. 2020, 28, 1218–1232.
- Bongermino, E.; Mastrorocco, F.; Tomaselli, M.; Monopoli, V.G.; Naso, D. Model and energy management system for a parallel hybrid electric unmanned aerial vehicle. In Proceedings of the 2017 IEEE 26th International Symposium on Industrial Electronics (ISIE), Edinburgh, UK, 19–21 June 2017; pp. 1868–1873.
- Trawick, D.; Milios, K.; Gladin, J.C. A Method for Determining Optimal Power Management Schedules for Hybrid Electric Airplanes. In Proceedings of the AIAA Propulsion and Energy Forum, Indianapolis, IN, USA, 19–22 August 2019.
- Liu, Y.; Yang, S.; Wang, L. Dynamic Programming Algorithm for Management of Aircraft Power Supply System. In Proceedings of the International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference, IEEE ESARS_ITEC, Nottingham, UK, 7–9 November 2018; pp. 1–6.
- Wu, D.; Todd, R.; Forsyth, A.J. Adaptive Rate-Limit Control for Energy Storage Systems. IEEE Trans. Ind. Electron. 2015, 62, 4231–4240.
- Kamal, M.B. Intelligent Control of Emergency APU for More Electric Aircraft. Master’s Thesis, University of Akron, Akron, OH, USA, 2018.
- Gao, Q.; Lei, T.; Deng, F.; Min, Z.; Yao, W.; Zhang, X. A Deep Reinforcement Learning based energy management strategy for fuel-cell electric UAV. In Proceedings of the 2022 International Conference on Power Energy Systems and Applications (ICoPESA), Virtual, 25–27 February 2022.
- Turpin, C.; Morin, B.; Bru, E.; Rallières, O.; Roboam, X.; Sareni, B.; Arregui, M.G.; Roux, N. Power for Aircraft Emergencies: A hybrid proton-exchange membrane H2/O2 fuel cell and ultracapacitor system. IEEE Electrif. Mag. 2017, 5, 72–85.
- Misley, A.; D’Arpino, M.; Ramesh, P.; Canova, M. A Real-Time Energy Management Strategy for Hybrid Electric Aircraft Propulsion Systems. In Proceedings of the AIAA Propulsion and Energy Forum, Virtual, 9–11 August 2021.
- Bornholdt, R.; Thielecke, F. Optimization of the Power Allocation for Flight Control Systems. In Proceedings of the SAE 2014 Aerospace Systems and Technology Conference, Cincinnati, OH, USA, 23–25 September 2014. SAE Technical Paper 2014-01-2188.
- Raveendran, V.; Andresen, M.; Liserre, M. Improving Onboard Converter Reliability for More Electric Aircraft with Lifetime-Based Control. IEEE Trans. Ind. Electron. 2019, 66, 5787–5796.
- Tseng, C.-H.; Chau, C.-H.; Elbassioni, K.; Khonji, M. Autonomous Recharging and Flight Mission Planning for Battery-operated Autonomous Drones. arXiv 2017, arXiv:1703.10049.
- Fang, S.; Xu, Y. Multiobjective Coordinated Scheduling of Energy and Flight for Hybrid Electric Unmanned Aircraft Microgrids. IEEE Trans. Ind. Electron. 2019, 66, 5686–5695.
- Wang, X.; Atkin, J.; Hill, C.; Bozhko, S. Power Allocation and Generator Sizing Optimization of More-Electric Aircraft Onboard Electrical Power during Different Flight Stages. In Proceedings of the AIAA Propulsion and Energy Forum, Indianapolis, IN, USA, 19–22 August 2019.
- Spagnolo, C.; Madonna, V.; Bozhko, S. Optimized low voltage loads allocation for MEA electrical power systems. In Proceedings of the AIAA Propulsion and Energy Forum, Indianapolis, IN, USA, 19–22 August 2019.
- Magne, P.; Nahid-Mobarakeh, B.; Pierfederici, S. Active stabilization of DC microgrids without remote sensors for more electric aircraft. IEEE Trans. Ind. Appl. 2013, 49, 2352–2360.
- Karanayil, B.; Ciobotaru, M.; Agelidis, V.G. Power flow management of isolated multiport converter for more electric aircraft. IEEE Trans Power Electron. 2017, 32, 5850–5861.
- Gao, F.; Bozhko, S.; Asher, G.; Wheeler, P.; Patel, C. An Improved Voltage Compensation Approach in a Droop-Controlled DC Power System for the More Electric Aircraft. IEEE Trans. Power Electron. 2016, 31, 7369–7383.
- Chen, J.; Song, Q. A Decentralized Energy Management Strategy for a Fuel Cell/Supercapacitor-Based Auxiliary Power Unit of a More Electric Aircraft. IEEE Trans. Ind. Electron. 2019, 66, 5736–5747.
- Li, Y.; He, H.; Peng, J.; Wang, H. Deep Reinforcement Learning-Based Energy Management for a Series Hybrid Electric Vehicle Enabled by History Cumulative Trip Information. IEEE Trans. Veh. Technol. 2019, 68, 5663–5675.
More