Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 2 by Vivi Li and Version 1 by Ross Eldred.
The spherical autonomous underwater vehicle (SAUV) is a particularly interesting architecture alternative for an underwater vehicle that must operate within entanglement-prone, complex environments such as confined spaces and littoral environments.
- RAATM
- AUV
1. Spherical Autonomous Underwater Vehicles
The spherical autonomous underwater vehicle (SAUV) is a particularly interesting architecture alternative for an underwater vehicle that must operate within entanglement-prone, complex environments such as confined spaces and littoral environments. Multiple SAUVs have been designed in recent years for such missions, including some that are highly advanced [5,6,7][1][2][3]. Two key benefits to a spherical hull profile are the reduction or elimination of external protuberances that can aggravate snagging and the fact that a spherical vehicle occupies the same volume of space as it rotates, making maneuvers easier in tight quarters. The WIEVLE was developed with these principles at the forefront while also seeking to minimize sediment disruption via a novel, quad-core, internal tunnel-thruster propulsion system that draws water from below the sphere and ejects the wash upward, at an angle, symmetrically, around the vertical axis. The original WIEVLE prototype, which presently lacks an anchoring mechanism, is depicted in Figure 1.
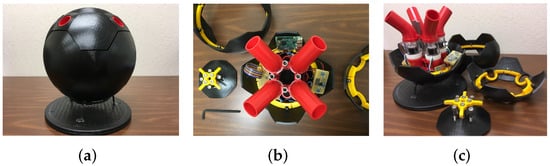
Figure 1. The first Wreck Interior Exploration Vehicle (WIEVLE) prototype: (a) WIEVLE on its test stand; (b) A top down view of the internal propulsion system. Note the central cavity where the RAATM may be installed; (c) WIEVLE’s spherical hull disassembled to reveal the internal propulsion core.
Other highly advanced SAUVs, such as the ENDURANCE [5][1], DEPTHX [6][2], and UX-1 [7][3], lack anchoring mechanisms because they are designed to return to the point of entry upon completion of their missions and are not intended to loiter for extended periods on station. A solution to enable an SAUV to passively remain on station for extended periods, rather than simply allowing the vehicle to drift or roll on the seabed and risk damage, is therefore desired. Although the anchoring system proposed in this aentrticley may be used within any shape or style of AUV of appropriate size, the authors are particularly interested in its application for spherical (or spheroid) hull profiles, as the operational capabilities offered by SAUVs may be particularly enhanced by the integration of such a mechanism. Furthermore, the authors contend that current UUV anchoring mechanisms are either unsuitable for implementation in an SAUV due to their negative impact upon the smooth profile of the hull exterior, or they are non-resetting, single-use mechanisms.
2. Anchoring Systems
Methods of anchoring vessels have existed for thousands of years [1][4]. Typically, anchors either dig into the seabed (such as hook anchors, bruce anchors, etc.), have sufficient mass to stay in one place on the seabed (such as those used with moorings for larger vessels and anchors for very small vessels), or screw into or are otherwise affixed to the seabed [8][5]. In most cases, rode made of chain, rope, cable, or a combination of materials attaches the anchor to the vessel [9][6]. In many cases, the anchor uses a length of rode at least the length of the vessel, made of chain that lays on the ocean floor to increase the anchor’s ability to hold fast [10][7]. All of the above techniques can be used by AUVs, but the implementation depends upon a variety of factors, such as the carrying capacity of the AUV.
Recent concepts and implementations of anchoring systems for underwater vehicles include the use of a bottom crawler, which is carried on the bottom of an AUV and delivered to the seabed by the AUV [11][8]. Once on the seabed, the AUV detaches from the bottom crawler but remains connected by a cable. Upon completion of the mission, the AUV is winched back to the crawler, re-attaches itself, and proceeds to a new location. Another recent prototype, described as a self-mooring AUV, uses compressed gas to jettison an anchor, in the form of a nosecone, attached to a torpedo-shaped AUV by a vacuum seal [12][9]. The weight of the anchor drags the AUV down vertically by a mooring line until the anchor rests on the seabed. The AUV later detaches from the mooring line via galvanic release and continues its mission. Other recent works [13,14,15,16][10][11][12][13] have described potential uses, such as harvesting the energy of currents using an organic kite-based generator, for AUVs that can anchor temporarily to the seabed. Another design describes a vehicle that uses jet pumps to cause an AUV to penetrate the seabed for seismic sensing [17][14].
3. Underwater Communications
The ability to transmit data is necessary for certain AUV missions. In many cases, a command and control entity may want to provide additional instructions to an AUV based on what the AUV has sensed in the environment. Facilitating this command and control requires two-way communications, including while the AUV is submerged. Existing technologies rely on sonar [18][15], radio frequency (RF) [19][16], and blue-green lasers to communicate [20][17]. Sonar uses pulses of sound to propagate through water as waves, is relatively slow compared to blue-green lasers and RF [20[17][18],21], and can dissipate rapidly or be impeded by underwater structures. Radio waves propagate via electromagnetic fields and can pass through almost any matter or in a vacuum, but they are significantly attenuated at most frequencies by water, which limits their effective C2 range and bit-rate [19][16]. While sonar and RF C2 links have been deployed for some time, and blue-green lasers have been proposed and demonstrated for many decades [22][19], blue-green lasers are relatively new to underwater applications and have not been widely fielded. Furthermore, unlike Extremely Low Frequency (ELF) antenna transmissions, blue-green lasers require a surface or airborne asset (often a satellite) to enable communications back to shore [23][20].
In spite of the limitations of RF transmission underwater, it is sometimes the preferred form of communication with the surface and other underwater assets, and it is the proposed communication method for the WIEVLE [4][21]. Many different antenna designs have been proposed and implemented for underwater C2 links [24,25,26][22][23][24]. Antennas that can deploy and be retracted have been proposed and implemented for a variety of purposes [27][25]. To enable the WIEVLE and other AUVs that operate passively for extended periods in a given space to communicate as a mobile network and receive external signals via RF link, an antenna that can be autonomously stowed and deployed is desired. Fixed antennas external to the WIEVLE hull would interfere with the ability to maneuver in locations with a high risk of entanglement. An internal antenna may interfere with onboard electronics and intelligence, surveillance, and reconnaissance (ISR) sensors, have undesirable transmission characteristics, and take up valuable space that could be used for other critical components within its relatively small profile. Thus, it is desirable to integrate the WIEVLE’s antenna with an anchor system.
Underwater radio C2 links can operate at various frequencies and power levels based on the required bandwidth and transmission distance. Various antenna types, such as dipoles, j-poles, and loops, have been used [28][26] from high frequencies (3–30 MHz) to low frequencies—especially extremely low frequencies in the 3–30 Hz range, using long mono-pole antennas (sometimes many kilometers long) that are constructed out of a conducting material that can be unrolled and trailed behind a moving AUV [29][27]. Higher frequencies transmit at shorter distances underwater but often have higher data throughput capabilities [30][28]. Higher-power transmissions can propagate farther, although in small AUVs, the additional power consumption may be too high for the system to support the load.
A variety of protocols have been developed specifically for underwater data transmission to handle low-bandwidth and high-interference environments. The JANUS protocol was developed by NATO and is available for anyone to use [31][29]. It primarily operates on sonar (acoustic) C2 links [32][30]. Other protocols, such as the SDRT, have been developed for underwater sensor networks [33][31]. Many more proposed protocols exist in the literature, with many focusing on sonar C2 links, but some using RF C2 links [34,35,36][32][33][34]. Only protocols designed to work via RF transmission are applicable to the proposed RAATM integrated antenna.
4. Anchor/Antenna Tether Mechanism (RAATM)
Resetting Anchor/Antenna Tether Mechanism (RAATM) is a device designed to provide dual anchoring and antenna capabilities to autonomous underwater vehicles (AUVs). The RAATM is resettable; an AUV can anchor at one location for a period of time, retrieve the anchor, move to a new location, and redeploy the anchor. Furthermore, the RAATM tether may also be used as an antenna for radio communications while deployed; this may allow smaller AUVs to accomplish missions that would otherwise require larger AUVs with dedicated antennas. While resettable anchors have been available for vessels for thousands of years [1][4], the RAATM has a unique design that is appropriate for small AUVs operating in dynamic conditions in littoral zones, coastal areas, riverine environments, and other bodies of water. The RAATM design combines an augering anchor spike with a sliding array of semi-flexible wire roots with friction-enhancing bristles embedded around the base of the anchor assembly.
References
- Richmond, K.; Gulati, S.; Flesher, C.; Hogan, B.P.; Stone, W.C. Navigation, control, and recovery of the ENDURANCE under-ice hovering AUV. In Proceedings of the 16th Annual International Symposium on Unmanned Untethered Submersible Technology (UUST), Durham, NH, USA, 23–26 August 2009.
- Gary, M.; Fairfield, N.; Stone, W.C.; Wettergreen, D.; Kantor, G.; Sharp, J.M., Jr. 3D mapping and characterization of Sistema Zacatón from DEPTHX (DE ep P hreatic TH ermal e X plorer). In Sinkholes and the Engineering and Environmental Impacts of Karst; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2008; pp. 202–212.
- Milosevic, Z.; Fernandez, R.A.S.; Dominguez, S.; Rossi, C. Guidance for Autonomous Underwater Vehicles in Confined Semistructured Environments. Sensors 2020, 20, 7237.
- Rosloff, J.P. A one-armed anchor of c. 400 BCE from the Ma’agan Michael vessel, Israel. A preliminary report. Int. J. Naut. Archaeol. 1991, 20, 223–226.
- Hinz, E.R. The Complete Book of Anchoring and Mooring; Cornell Maritime Press/Tidewater Publishers: Centreville, VA, USA, 1994.
- Rousmaniere, J. The Annapolis Book of Seamanship: Completely Revised, Expanded and Updated; Simon and Schuster: New York, NY, USA, 1999.
- House, D. Ship Handling; Routledge: London, UK, 2007.
- Pyo, J.; Yu, S.C.; Park, J.C.; Park, S.C. Development of a robotic anchoring system for underwater vehicle under water current. In Proceedings of the 2012 Oceans, Yeosu, Korea, 21–24 May 2012; pp. 1–5.
- McCarter, B.; Briggs, R.; Portner, S.; Stilwell, D.; Neu, W.; Coe, R.; Duelley, R.; Malley, D.; Mims, J. Design and testing of a self-mooring AUV. In Proceedings of the 2012 Oceans, Hampton Roads, VA, USA, 14–19 October 2012; pp. 1–8.
- Bin-Karim, S.; Muglia, M.; Mazzoleni, A.; Vermillion, C. Control of a relocatable energy-harvesting autonomous underwater vehicle in a spatiotemporally-varying gulf stream resource. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 2575–2580.
- Tandon, S.; Divi, S.; Muglia, M.; Vermillion, C.; Mazzoleni, A. Modeling and dynamic analysis of a mobile underwater turbine system for harvesting marine hydrokinetic energy. Ocean. Eng. 2019, 187, 106069.
- Bin-Karim, S.; Muglia, M.; Vermillion, C. Centralized position optimization of multiple agents in spatiotemporally-varying environment: A case study with relocatable energy-harvesting autonomous underwater vehicles in the gulf stream. In Proceedings of the 2019 IEEE Conference on Control Technology and Applications (CCTA), Hong Kong, China, 19–21 August 2019; pp. 264–269.
- Reed, J.; Daniels, J.; Siddiqui, A.; Cobb, M.; Vermillion, C. Optimal exploration and charging for an autonomous underwater vehicle with energy-harvesting kite. In Proceedings of the 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020; pp. 4134–4139.
- Brizard, T. Jet-pump-based autonomous underwater vehicle and method for coupling to ocean bottom during marine seismic survey. U.S. Patent 9381986B2, 5 July 2016.
- Zheng, M.; Wang, L.; Stoner, R.; Coates, R. Underwater digital communication utilising parametric sonar with M-ary DPSK modulation. IEE Proc. Radar Sonar Navig. 1999, 146, 213–218.
- Yusof, M.A.B.; Kabir, S. An overview of sonar and electromagnetic waves for underwater communication. IETE Tech. Rev. 2012, 29, 307–317.
- Li, Y.; Yin, H.; Ji, X.; Wu, B. Design and implementation of underwater wireless optical communication system with high-speed and full-duplex using blue/green light. In Proceedings of the 10th International Conference on Communication Software and Networks (ICCSN), Chengdu, China, 6–9 July 2018; pp. 99–103.
- Gough, P.T.; Hawkins, D.W. A short history of synthetic aperture sonar. In Proceedings of the IGARSS’98. Sensing and Managing the Environment. 1998 IEEE International Geoscience and Remote Sensing. Symposium Proceedings. (Cat. No. 98CH36174), Seattle, WA, USA, 6–10 July 1998; Volume 2, pp. 618–620.
- Wiener, T.; Karp, S. The role of blue/green laser systems in strategic submarine communications. IEEE Trans. Commun. 1980, 28, 1602–1607.
- Wang, M.; Yuan, X.; AlHarbi, O.; Deng, P.; Kane, T. Propagation of laser beams through air-sea turbulence channels. In Laser Communication and Propagation through the Atmosphere and Oceans VII: Proceedings of the SPIE Optical Engineering and Applications, San Diego, CA, USA, 19–23 August 2018; International Society for Optics and Photonics: Bellingham, WA, USA, 2018; Volume 10770, p. 1077003.
- Eldred, R.; Lussier, J.; Pollman, A. Design and Testing of a Spherical Autonomous Underwater Vehicle for Shipwreck Interior Exploration. J. Mar. Sci. Eng. 2021, 9, 320.
- Inácio, S.I.; Pereira, M.R.; Santos, H.M.; Pessoa, L.M.; Teixeira, F.B.; Lopes, M.J.; Aboderin, O.; Salgado, H. Antenna design for underwater radio communications. In Proceedings of the Oceans 2016, Shanghai, China, 10–13 April 2016; pp. 1–6.
- Kelley, B.; Naishadham, K. RF multicarrier signaling and antenna systems for low SNR broadband underwater communications. In Proceedings of the IEEE Topical Conference on Power Amplifiers for Wireless and Radio Applications, Austin, TX, USA, 20–23 January 2013; pp. 169–171.
- Smolyaninov, I.; Balzano, Q.; Young, D. Development of broadband underwater radio communication for application in unmanned underwater vehicles. J. Mar. Sci. Eng. 2020, 8, 370.
- Rogers, R.L.; Buhl, D.P. Clandestine ELOS/OTH RF Communications for Unmanned Underwater Vehicles; Technical Report; Applied Research Laboratories, University of Texas: Austin, TX, USA, 2002.
- Aboderin, O.; Pessoa, L.M.; Salgado, H.M. Performance evaluation of antennas for underwater applications. In Proceedings of the Wireless Days, Porto, Portugal, 29–31 March 2017; pp. 194–197.
- Fessenden, C.; Cheng, D. Development of a trailing-wire E-field submarine antenna for extremely low frequency (ELF) reception. IEEE Trans. Commun. 1974, 22, 428–437.
- Palmeiro, A.; Martin, M.; Crowther, I.; Rhodes, M. Underwater radio frequency communications. In Proceedings of the Oceans 2011 IEEE, Santander, Spain, 6–9 June 2011; pp. 1–8.
- Potter, J.; Alves, J.; Green, D.; Zappa, G.; Nissen, I.; McCoy, K. The JANUS underwater communications standard. In Proceedings of the 2014 Underwater Communications and Networking (UComms), Sestri Levante, Italy, 3–5 September 2014; pp. 1–4.
- Alves, J.; Furfaro, T.; LePage, K.; Munafò, A.; Pelekanakis, K.; Petroccia, R.; Zappa, G. Moving JANUS forward: A look into the future of underwater communications interoperability. In Proceedings of the Oceans 2016 MTS/IEEE, Monterey, CA, USA, 19–23 September 2016; pp. 1–6.
- Xie, P.; Zhou, Z.; Peng, Z.; Cui, J.H.; Shi, Z. SDRT: A reliable data transport protocol for underwater sensor networks. Ad Hoc Netw. 2010, 8, 708–722.
- Luo, Y.; Pu, L.; Peng, Z.; Zhou, Z.; Cui, J.H. CT-MAC: A MAC protocol for underwater MIMO based network uplink communications. In Proceedings of the Seventh ACM International Conference on Underwater Networks and Systems, Los Angeles, CA, USA, 5–6 November 2012; pp. 1–8.
- Akyildiz, I.F.; Pompili, D.; Melodia, T. State-of-the-art in protocol research for underwater acoustic sensor networks. In Proceedings of the 1st ACM International Workshop on Underwater Networks, Los Angeles, CA, USA, 25 September 2006; pp. 7–16.
- Yoon, S.; Azad, A.K.; Oh, H.; Kim, S. AURP: An AUV-aided underwater routing protocol for underwater acoustic sensor networks. Sensors 2012, 12, 1827–1845.
More