Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 2 by Vivi Li and Version 1 by pinjia zhang.
Permanent magnet machines are widely applied in motor drive systems. Therefore, condition monitoring of permanent magnet machines has great significance to assist maintenance. High temperatures are accountable for lots of typical malfunctions and faults, such as demagnetization of the permanent magnet (PM) and inter-turn short circuit of stator windings. Therefore, temperature monitoring of the PM and stator windings is essential for reliable operation.
- thermal monitoring
- permanent magnet machines
- PM
- stator windings
1. Introduction
Permanent magnet synchronous machines (PMSMs) have attracted more and more attention, especially in recent years. The significant research efforts are due to the high dynamic response, high reliability, high torque density, and high efficiency of PMSMs. Meanwhile, PMSMs have been used for numerous applications, such as automotive, wind power generation, electric vehicles, aerospace, and servo-drives. Therefore, reliable operation is critical for protecting the safety of life and production. In practice, the permanent magnet (PM) remanent flux density determines the torque production capability and the insultation of stator windings determines the probability of failure or residual lifetime. Consequently, the performance of PMSMs is mainly dependent on the PM magnetization state and insulation condition of the stator windings. However, these two properties are susceptible to the operating environment, e.g., the component temperature. High temperatures cause the demagnetization of the PM and intensive thermal stress will lead to insulation aging of the stator windings.
In the last few decades, the techniques of temperature monitoring for PMSMs have been comprehensively researched and developed. Whether for the PM or stator windings, from the implementation level, the temperature monitoring methods can be categorized into contact direct measuring methods and non-contact estimation methods.
Generally, contact direct measuring methods directly measure the temperature, and are usually implemented using surface-mounted thermal devices [1,2,3,4,5,6][1][2][3][4][5][6]. In addition, infrared-detecting methods [7,8][7][8] are widely used in some situations for convenience. Because of the installation requirements of temperature sensors, the applicability of these direct measuring methods is determined by the accessibility of mechanical structure and overall cost. Non-contact estimation methods are usually based on the identification of thermal-relevant parameters or the temperature derivation of intelligence algorithm. Relying on the measurable quantities, models [9] or iterative multilevel-algorithms [10] are established to monitor the temperature.
Considering the principles used in these methods, these temperature monitoring methods can be classified and presented from the perspective of technical category. Technically, the existing methods can also be categorized into sensor-based methods, model-based methods, and AI algorithm-based methods. In Figure 1, methods classified by monitoring techniques are presented respectively.
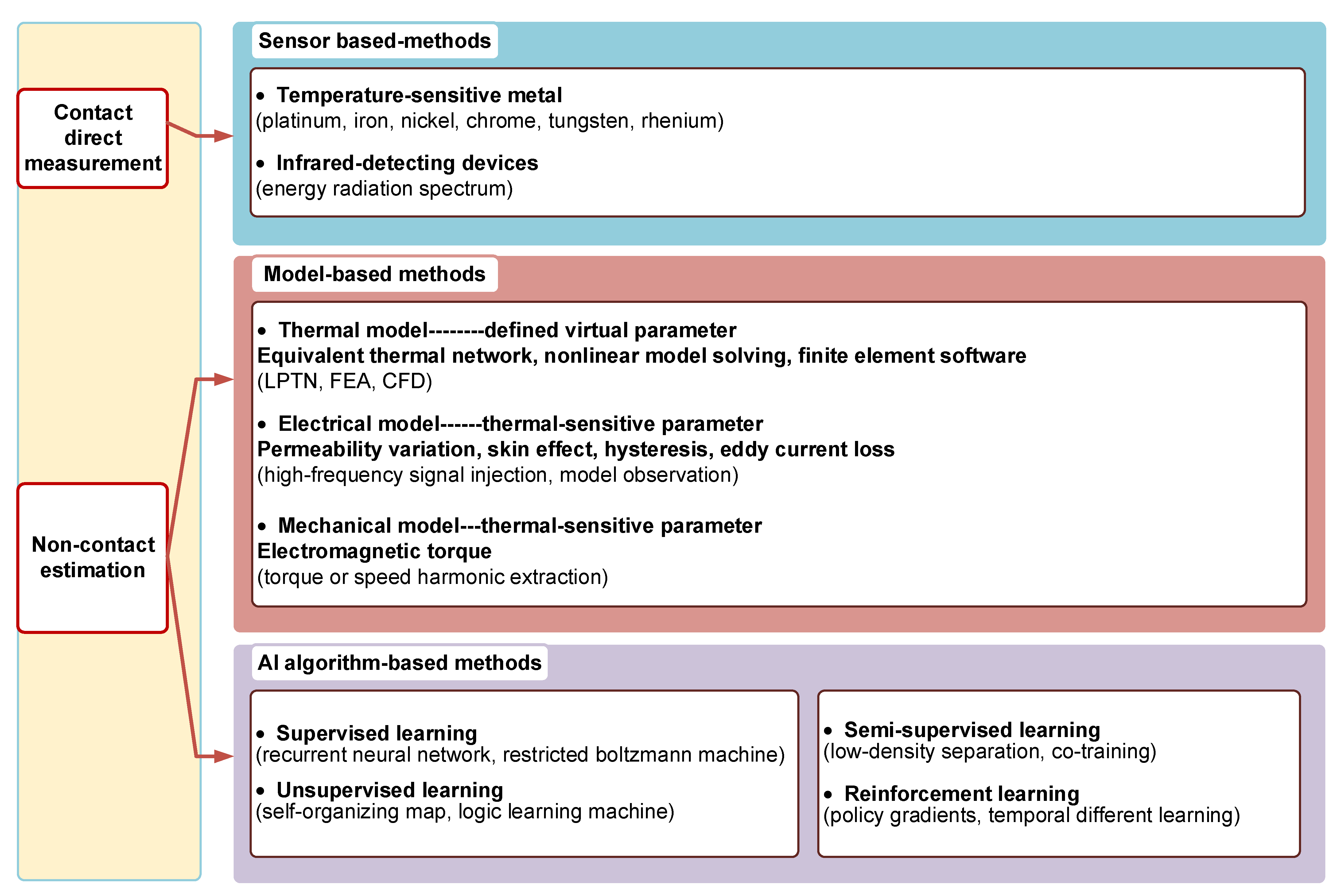
Figure 1.
Categorization of temperature monitoring methods by techniques.
Sensor-based methods are comprehensible, which are based on temperature sensors. These methods provide the most straightforward way, which is accompanied by the expensive cost and installation problem.
As for the model-based methods, the classification can be based on a thermal model, electrical model, and mechanical model, and the availability of these methods are demonstrated respectively. In contrast to the direct measuring of sensor-based methods, these model-based methods commonly rely on thermal-relevant parameters or are based on the specification and parameters.
Thermal model-based methods directly estimate the temperature. The heat transferring process of machines can be described through the lumped-parameter thermal network (LPTN) models. With temperature information of available positions, the thermal losses are calculated to derive the temperature difference. In addition, finite element methods (FEM) can be used to simulate thermal phenomena.
Electrical model-based methods demonstrate the link between electrical parameters and thermal effect. Due to the different mechanisms between temperature monitoring for the PM and stator windings, electrical model-based estimation methods are introduced separately. For the PM, there are two main methods: signal injection-based methods and PM flux-based methods. Signal injection-based methods are usually implemented by high-frequency signal injection. Through induced high-frequency resistance and inductance, which are thermal sensitive and vary linearly with temperature, the PM temperature can be derived. The PM flux-based methods also rely on the temperature-sensitive parameter, i.e., the PM flux. Unlike the signal injection, the PM flux can be estimated based on the observational model or direct measurement during normal operation. For the temperature estimation of stator windings, similar to the PM, there are two main methods: observation model-based methods and signal injection-based methods. In comparison with thermal-sensitive parameters of the PM, the resistance of the stator winding is commonly utilized for temperature estimation and the DC signal is usually used for injection.
Mechanical model-based methods exploit the combination of mechanical and electrical parameters in mechanical equations. Through the conjoint analysis of multiparameter relations, the thermal-relevant parameter can be extracted.
In addition, the AI algorithm-based methods used for temperature monitoring are attracting more and more attention and research. From the perspective of model training, these algorithms can be classified into the following categories: supervised learning, unsupervised learning, semi-supervised learning, and reinforcement learning. Relying on advanced processors and excellent adaptability, the AI algorithm-based methods are preferred in extensive monitoring fields.
According to the categorization, various schemes relying on different mechanisms are proposed. Therefore, it is of great significance to review these temperature monitoring techniques for the following purposes.
-
Provide an introduction of the existing temperature monitoring techniques.
-
Summarize the monitoring principles of these techniques.
-
Identify the advantages and limitations.
-
Discuss the challenges and opportunities for practical applications.
Recently, relevant overview papers have been published to review the temperature monitoring techniques for motor components, such as the PM. In [11], magnet temperature determination techniques are introduced and compared. However, the focus of this paperntry is on the implementation process. As previously mentioned, a prospective analysis for challenges and opportunities of temperature monitoring and investigation of the research trend is required. In addition, the practical applications should be discussed.
Therefore, the main purpose of this paperntry is to provide a better understanding and exhibition of the existing methods on feasibility and application prospect. Focusing on the PM and stator windings, the main contribution of this paperentry lies in the following:
-
The existing methods for temperature monitoring are categorized and introduced.
-
The mechanisms of relevant failures caused by temperature rising is presented.
-
The principles and implementation procedure of the existing methods are introduced.
-
The advantages and limitations of these methods are summarized and analyzed.
-
The challenges and opportunities for practical applications are discussed.
-
The research trend is sketched and presented.
2. Sensor-Based Methods of Temperature Monitoring for PM Machines
Sensor-based monitoring methods are based on direct temperature measurement through thermal-sensitive devices. The basic concept in this category is to obtain the temperature of a target component by precise measurement. These detecting devices are mainly made of thermal-sensitive metals or based on infrared sensing. If permitted, PM machines can be modified to install the temperature sensors. It is convenient to implement direct measurement on stator windings due to the static state. As for the PM, according to the installation manner, the most typical techniques can be classified into battery-powered devices, slip rings, and infrared sensors. Considering that the infrared sensors are additional devices and the machine surface to be tested should be exposed, it is worth mentioning that the infrared temperature measuring methods are categorized as a direct contact measuring method. Considering that the major challenge of sensor-based methods is located on the PM monitoring, this section is mainly focused on introducing strategies for PM temperature. Generally, the entire temperature monitoring devices are attached on the target component in battery-powered methods. In [2,4][2][4], the PM rotor is modified to embed the thermocouples of type K. There are six sensors, of which four are radial surfaced mounted on two ends of the rotor and two are buried in holes drilled in the rotor with a depth of 5 mm and 15 mm, respectively. The two drilled holes are located on the same radial surface on one end. In addition to the modification of the motor, the existing space of the motor is also utilized. Then, the battery devices are integrated to install on the rotor. However, transmitting the temperature information is complex and inconvenient for battery-powered methods. For convenient signal transmission, wireless communication is utilized. In [15][12], temperature measuring equipment is attached to the PM by inserting it into the extra space. For each PM section, there is a sensor-array that consists of 15 TMP100 sensors in a 3 × 5 arrangement attached to the PM surface. The surface of each PM part is rectangular. These 15 sensors are uniformly distributed in a rectangular array. Meanwhile, the same temperature measurement arrays are configured on the six PM parts, respectively. Nevertheless, attaching sensors to the target component is not always possible in practice. Therefore, no-contact measuring methods based on infrared devices are proposed. In [7], a surface temperature measurement of excitation winding in rotation is presented. The infrared thermometer used for the measurement is an industrial sensor with a thermopile detector. A measurement junction is connected to a photosensitive element exposed to infrared radiation. Meanwhile, the digital temperature sensors are used for reference. In addition, the infrared thermometer distinguishes two different surfaces in terms of radiation: an excitation winding placed on a salient pole and an interpolar surface. The emissivity factor is set to realize accurate temperature detecting by an industrial infrared camera. Similarly, an IR camera is used to detect the temperature of the rotating surface. In addition, the slip rings can be utilized to transfer the measurement information of PM temperature [16][13]. The slip rings method is a classical technique utilized in electrical machines. These devices contain stationary and rotating components for transmitting the electrical signal of the rotating sensors.3. Model-Based Methods of Temperature Monitoring for PM Machines
Restricted by the previously mentioned limitations of sensor-based methods, specifications, available parameters, and measurable signals are utilized in some research to derive the temperature of PM machines. These monitoring techniques rely on typical machine models, which can be classified into model-based methods. As shown in Figure 32, the model-based methods can be categorized into thermal model-based methods, electrical model-based methods, and mechanical model-based methods. For thermal model-based methods, equivalent thermal parameters, such as resistances and capacitances, are calculated to establish thermal network and used to derive the node temperature. In addition, the finite element models can also be used for analyzing the thermal process. For the other model-based methods, relevant temperature-sensitive parameters are respectively utilized for temperature derivation of target components. Therefore, temperature information of target components is directly acquired through thermal model-based methods, and indirectly acquired through the electrical model and mechanical model.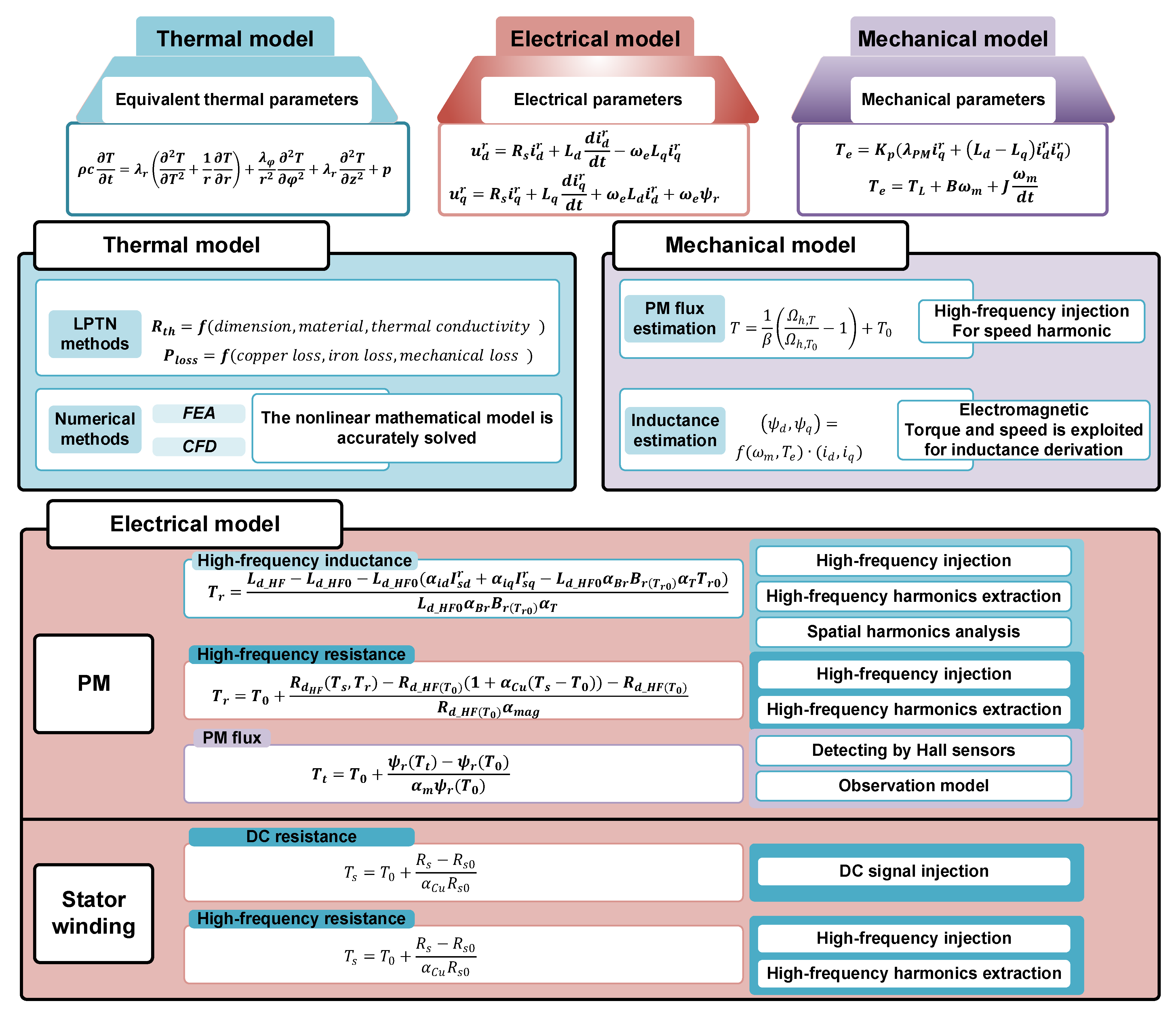
Figure 32.
Demonstration of specific techniques for model-based methods.
4. AI algorithm-Based Methods of Temperature for PM Machines
Artificial intelligence (AI) is an emerging technique that branched out of computer science. Human intelligence is simulated and extended in this area of research. Meanwhile, this technique is based on the algorithm, data, and computing ability. It is worth mentioning that this section focuses on monitoring techniques that mainly rely on the AI algorithm. Machine learning is the core technique in these methods. Through training in historical data, implicit information can be extracted by the constructed network. The main advantages of the AI algorithm-based methods are the extensive applicability and automaticity. Compared with the model-based methods, the precision limitations caused by the required expertise and sophisticated modelling are avoided. Meanwhile, the estimated temperature is derived by measurable quantities and empirical properties involved in the historical data set. The properties reveal the relation between measurable quantities and target parameters. Furthermore, the AI techniques guarantee the robustness for a variety of operating conditions. Common AI techniques for temperature monitoring are neutral networks (NN), Particle Swarm Optimization (PSO), genetic algorithm (GA), etc.
In general, the AI algorithm-based methods are based on collecting extensive measurements of quantities and target parameters, which are independent of the motor specifications and mathematical models. These quantities should be electrical, mechanical, and thermal parameters. Absolutely, measurable thermal quantities are usually necessary for PM temperature monitoring. In the meanwhile, the condition-relevant quantities are also indispensable. Through adequate training based on data-driven algorithms, the updated measurements can be used to derive the updated parameters, which are unavailable by direct measuring. For temperature monitoring of PM machines, AI algorithm-based methods are getting attention in recent years. To be specific, the temperature of target components and other relevant available signals should be recorded and taken as inputs for training. Taking the deep recurrent and convolutional neural networks presented in [36][14] as an example, there are sequence learning and multilevel calculating processes involved in this algorithm. Therefore, based on this construction, this algorithm can be called multilayer perceptron (MLP).
The architectures of both topologies are both based on the MLP algorithm. These layers can be classified into the input layer, hidden layer, and output layer. There are weights between layers. The node values in one layer are updated gradually. Finally, the output sequence is obtained and the weights and other parameters can be modified by the estimation errors. In this condition, adequate data is needed for better performance.
The sequence learning mode of a state-of-the-art ANN technique called the temporal convolutional network (TCN) is shown [36][14]. It inherits recent advances of applications on sequential data and dilated convolutions of the convolutional neutral network (CNN). The prediction yˆT is informed by the corresponding observation xT and a finite set of past observations. The input sequence consists of the external temperature, measurable electrical parameters, and rotor speed. The targets are the temperatures of the PM, stator teeth, stator winding, and stator yoke. The function of hidden layer can be concluded as the data abstraction, which extracts the correlation patterns of inputs and passes the results to the next layer. The hidden layers are generated by repeating updates to acquire acceptable errors between output and sample values. The targets are the thermal quantities of the stator components and the PM.
Meanwhile, the observations can be distributed apart from each other over the sequence rather than being adjacent. In this mode, the crucial, further past events can be detected for reasonable training. With causal and dilating temporal convolutions, this dilated operation leads to an effectively expanded receptive field of the TCN, which would be directly proportional to the network’s depth.
In [37][15], a Nonlinear Auto-Regressive with eXogenous-input (NARX) model based on a difference-estimating feedforward neural network (DFNN) is used to monitor the temperature of the PM and windings of PMSMs. The NARX handles the nonlinear relationships between the state at the next moment and the past information. In contrast to the traditional neural network, this paperntry proposes to introduce a scalar transformation coefficient to the feedback chain. The training is conducted with an input layer containing the delayed temperature values of five parts and the recorded initial condition. The switching function, measured currents, machine position, voltage output of the current controller, estimated speed, and measured ambient temperature are recorded as the initial input vector. In addition, the temperature of PM and stator windings are measured as the initial state vector.
References
- Jianzhong, G.; Hui, G.; Zhe, H. Rotor temperature monitoring technology of direct-drive permanent magnet wind turbine, 2009. In Proceedings of the International Conference on Electrical Machines and Systems, Tokyo, Japan, 15–18 November 2009; pp. 1–4.
- Ganchev, M.; Umschaden, H.; Kappeler, H. Rotor temperature distribution measuring system. In Proceedings of the IECON 2011-37th Annual Conference of the IEEE Industrial Electronics Society, Melbourne, Australia, 7–10 November 2011; pp. 2006–2011.
- Kuppuswamy, R.; Rainey, S. Synthesis of Experiences using Resistive Temperature Detectors (RTD) as PD Sensors for Detecting and Locating Electrical Defects inside Generator Stator Windings. In Proceedings of the 2019 IEEE Electrical Insulation Conference (EIC), Calgary, AB, Canada, 16–19 June 2019; pp. 405–409.
- Ganchev, M.; Kubicek, B.; Kappeler, H. Rotor temperature monitoring system. In Proceedings of the XIX International Conference on Electrical Machines-ICEM 2010, Rome, Italy, 6–8 September 2010; pp. 1–5.
- Kovačić, M.; Vražić, M.; Gašparac, I. Bluetooth wireless communication and 1-wire digital temperature sensors in synchronous machine rotor temperature measurement. In Proceedings of the 14th International Power Electronics and Motion Control Conference EPE-PEMC 2010, Ohrid, Macedonia, 6–8 September 2010; pp. T7-25–T7-28.
- Park, D.; Jung, H.; Cho, H.; Sul, S. Design of Wireless Temperature Monitoring System for Measurement of Magnet Temperature of IPMSM. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 656–661.
- Stipetic, S.; Kovacic, M.; Hanic, Z.; Vrazic, M. Measurement of Excitation Winding Temperature on Synchronous Generator in Rotation Using Infrared Thermography. IEEE Trans. Ind. Electron. 2012, 59, 2288–2298.
- Mori, M.; Novak, L.; Sekavčnik, M.; Kuštrin, I. Application of IR thermography as a measuring method to study heat transfer on rotating surface. Forsch. Ing. 2008, 72, 1–10.
- Burke, R.; Giedymin, A.; Wu, Z.; Chuan, H.; Bourne, N.; Hawley, J.G. A Lumped Parameter Thermal Model for Single-Sided AFPM Machines with Experimental Validation. IEEE Trans. Transp. Electrif. 2020, 6, 1065–1083.
- Erazo, D.E.G.; Wallscheid, O.; Böcker, J. Improved Fusion of Permanent Magnet Temperature Estimation Techniques for Synchronous Motors Using a Kalman Filter. IEEE Trans. Ind. Electron. 2020, 67, 1708–1717.
- Wallscheid, O.; Huber, T.; Peters, W.; Böcker, J. A critical review of techniques to determine the magnet temperature of permanent magnet synchronous motors under real-time conditions. EPE J. 2016, 26, 11–20.
- Fernandez, D.; Reigosa, D.; Tanimoto, T.; Kato, T.; Briz, F. Wireless permanent magnet temperature & field distribution measurement system for IPMSMs. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 3996–4003.
- Martiny, W.T.; McCoy, R.M.; Margolis, H.B. Thermal Relationships in an Induction Motor under Normal and Abnormal Operation, in Transactions of the American Institute of Electrical Engineers. Trans. Am. Inst. Electr. Engineers. Part III Power Appar. Syst. 1961, 80, 66–76.
- Kirchgässner, W.; Wallscheid, O.; Böcker, J. Deep Residual Convolutional and Recurrent Neural Networks for Temperature Estimation in Permanent Magnet Synchronous Motors. In Proceedings of the 2019 IEEE International Electric Machines & Drives Conference (IEMDC), San Diego, CA, USA, 12–15 May 2019; pp. 1439–1446.
- Lee, J.; Ha, J. Temperature Estimation of PMSM Using a Difference-Estimating Feedforward Neural Network. IEEE Access 2020, 8, 130855–130865.
More