Multi-object Re-Identification (ReID), based on a wide range of surveillance cameras, is nowadays a vital aspect in modern cities, to better understand city movement patterns among the different infrastructures, with the primary intention of rapidly mitigate abnormal situations, such as tracking car thieves, wanted persons, or even lost children. Given an image or video of an object-of-interest (query), object identification aims to identify the object from images or video feed taken from different cameras.
- person ReID
- computer vision
- deep neural networks
- image enhancement
1. Introduction

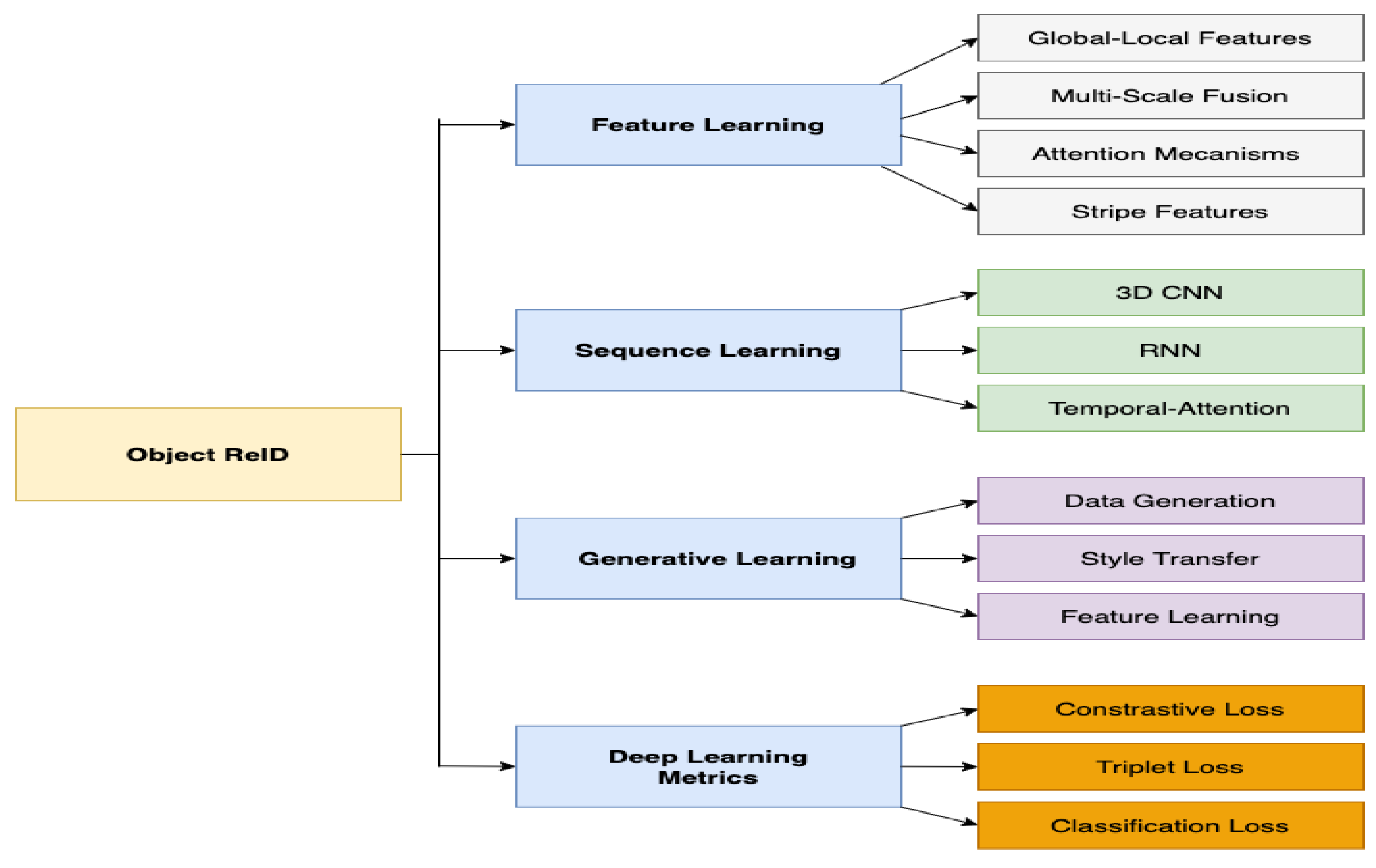
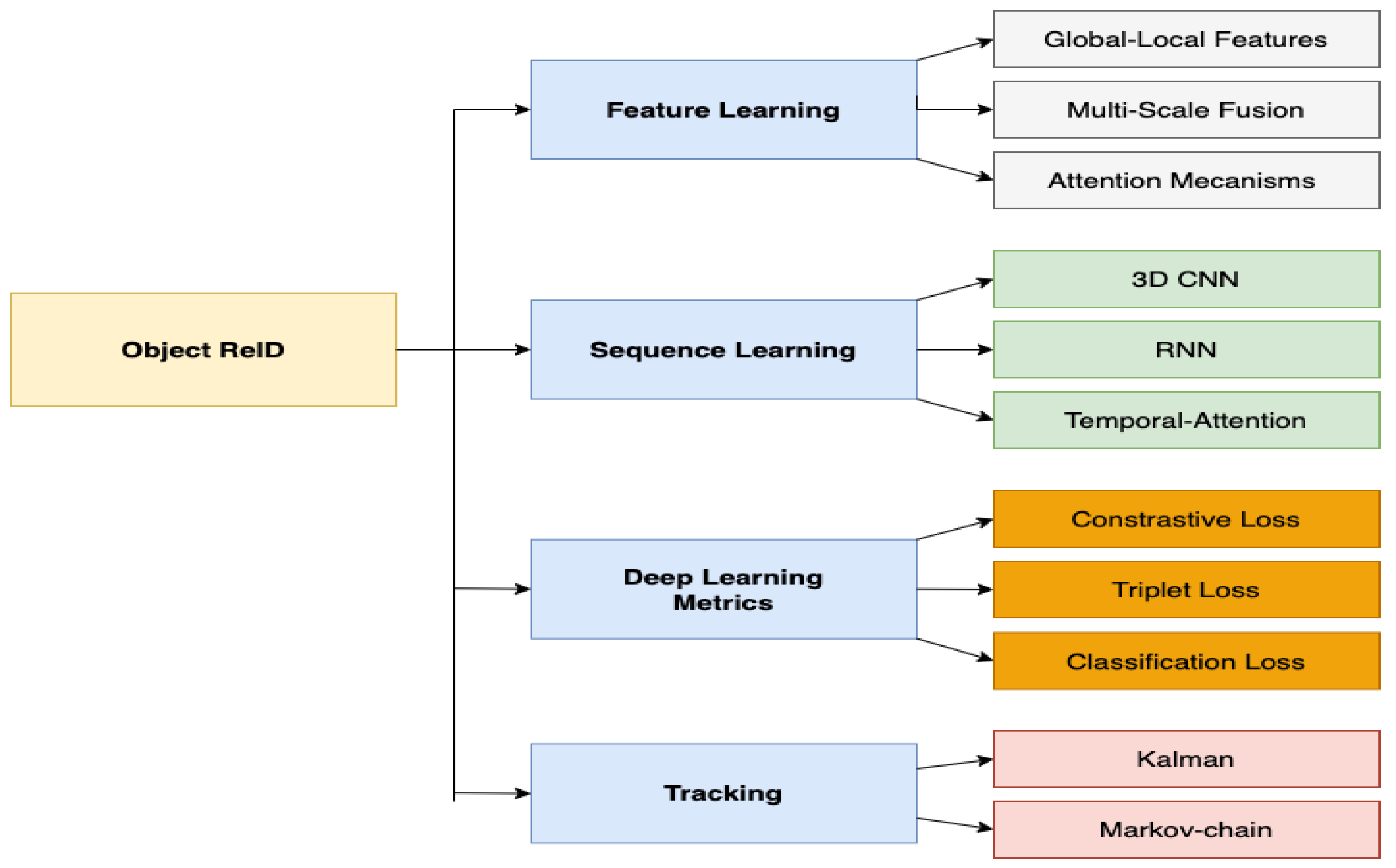
2. Deep Learning for Object Re-Identification
3. Evaluation Metrics
Cumulative Matching Characteristic curve (CMC) is a common evaluation metric for person or object ReID methods. It can be considered a simple single-gallery-shot setting, where each gallery identity only has one instance. Given a probe image, an algorithm will rank the entire gallery sample according to the distances to the probe, with the CMC top-k accuracy given as: which is a shifted step function. The final Cumulative Matching Characteristics (CMC) curve is built by averaging the shifted step functions over all the queries.
Another commonly used metric is the mean Average Precision (mAP), which is very often employed on each image query, and defined as:
which is a shifted step function. The final Cumulative Matching Characteristics (CMC) curve is built by averaging the shifted step functions over all the queries.
Another commonly used metric is the mean Average Precision (mAP), which is very often employed on each image query, and defined as:
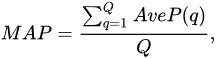 where Q is the number of queries.
where Q is the number of queries.
4. Person Re-Identification
Person ReID is the problem of matching the same individuals across multiple image cameras or across time within a single image camera. The computer vision and pattern recognition research communities have paid particular attention to it due to its relevance in many applications, such as video surveillance, human–computer interactions, robotics, and content-based video retrieval. However, despite years of effort, person ReID remains a challenging task for several reasons [16], such as variations in visual appearance and the ambient environment caused by different viewpoints from different cameras. Significant changes in humans pose—across time and space—background clutter and occlusions; different individuals with similar appearances present difficulties to the ReID tasks. Moreover, with little or no visible image faces due to low image resolution, the exploitation of biometric and soft-biometric features for person ReID is limited. For the person ReID task, databases and different approaches have been proposed by several authors.4.1. Person Re-Identification Databases
The recognition of human attributes, such as gender and clothing types, has excellent prospects in real applications. However, the development of suitable benchmark datasets for attribute recognition remains lagged. Existing human attribute datasets are collected from various sources or from integrating pedestrian ReID datasets. Such heterogeneous collections pose a significant challenge in developing high-quality fine-grained attribute recognition algorithms. Among the public databases that have been proposed for person ReID, some examples can be found in the open domain, such as the Richly Annotated Pedestrian (RAP) [17], which contains images gathered from real multi-camera surveillance scenarios with long-term collections, where data samples are annotated, not only with fine-grained human attributes, but also with environmental and contextual factors. RAP contains a total of 41,585 pedestrian image samples, each with 72 annotated attributes, as well as viewpoints, occlusions, and body part information. Another example is the VIPeR [18] database, which contains 632 identities acquired from 2 cameras, forming a total of 1264 images. All images were manually annotated, with each image having a resolution of 128 x 48pixels.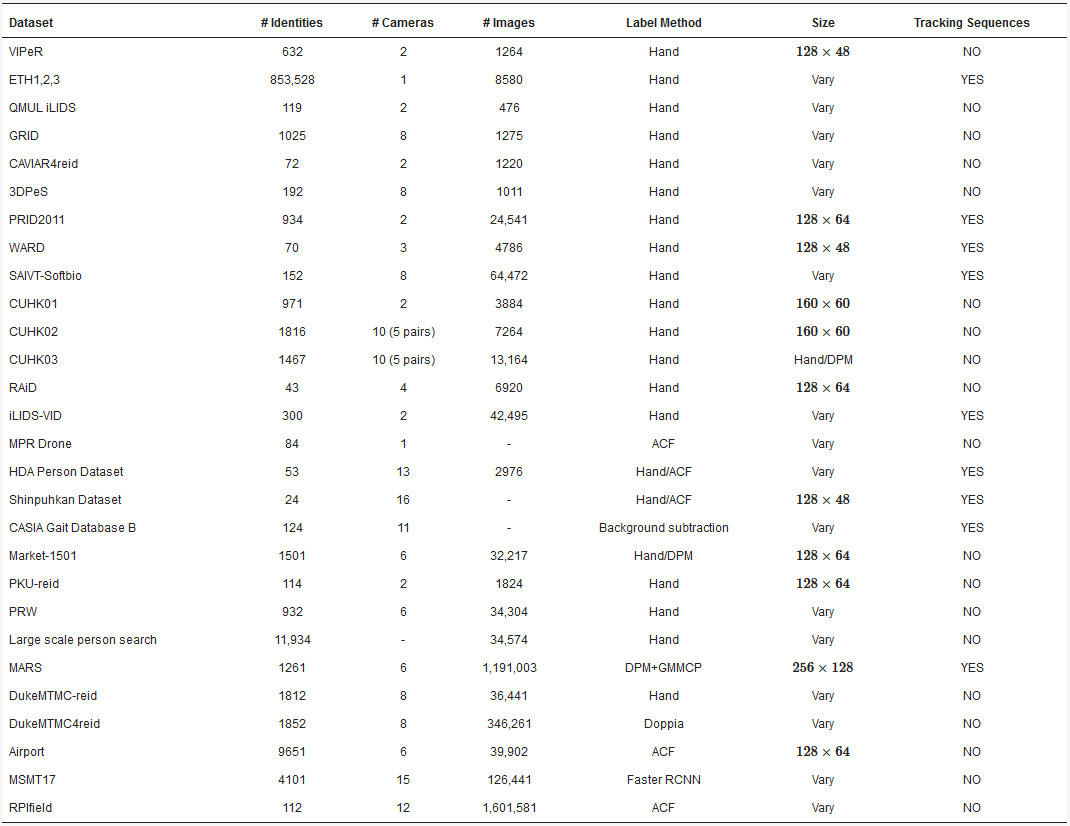
4.2. Person Re-Identification Methods
5. ReID and Spatial–Temporal Multi Object ReID Methods
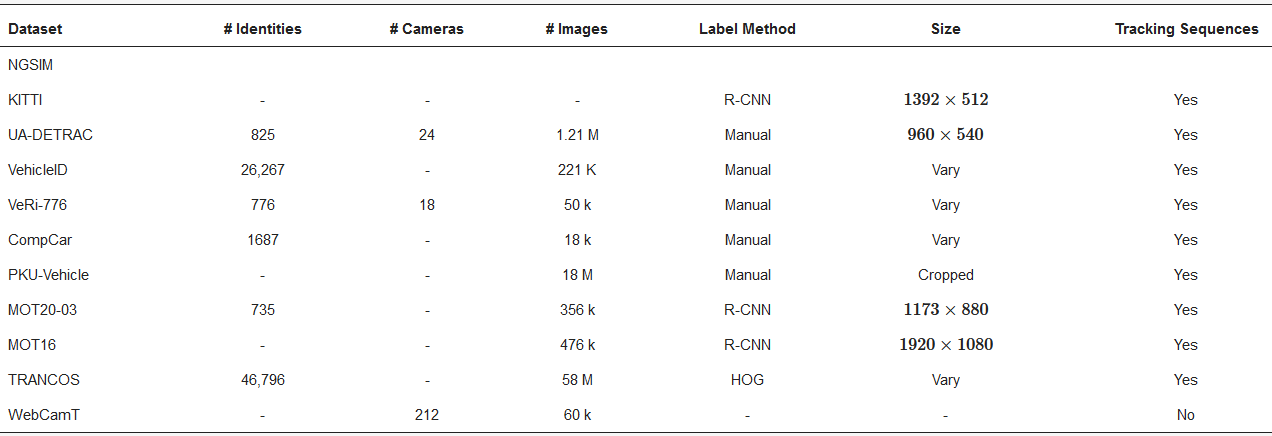
5.1. Multi Object ReID Datasets with Trajectories

5.2. Spatial–Temporal Constrained and Multi Object ReID Methods
6. Methods for Image Enhancement
|
Reference |
Main Techniques |
# Data Success |
Pros/Cons |
|---|---|---|---|
|
GANS, conditional GAN |
UCID PSNR 24.34 |
Robust, SOTA |
|
|
Bilateral filter, image decomposition |
Systeticg VIF 0.60 |
Simple, Parameter dependent |
|
|
GMM, image decomposition |
Systetic SSIM 0.880 |
Simple, Pre-trained dependent |
|
|
CNN, HF component layer |
Systetic SSIM 0.900 |
Simple, Robust |
PSNR—peak signal to noise ratio (higher, the better; range: [0.0,—]), VIF—Information Fidelity (higher the better, range: [0.0, 1.0]), SSIM—structural similarity index (higher, the better; range: [0.0, 1.0]).
References
- Wu, L.; Wang, Y.; Gao, J.; Li, X. Deep adaptive feature embedding with local sample distributions for person re-identification. Pattern Recognit. 2018, 73, 275–288.
- Zhang, W.; Ma, B.; Liu, K.; Huang, R. Video-based pedestrian re-identification by adaptive spatio-temporal appearance model. IEEE Trans. Image Process. 2017, 26, 2042–2054.
- Varior, R.R.; Haloi, M.; Wang, G. Gated Siamese Convolutional Neural Network Architecture for Human Re-Identification. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 791–808.
- Xiao, T.; Li, H.; Ouyang, W.; Wang, X. Learning deep feature representations with domain guided dropout for person re-identification. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Vegas, NV, USA, 27–30 June 2016; pp. 1249–1258.
- McLaughlin, N.; Martinez del Rincon, J.; Miller, P. Recurrent convolutional network for video-based person re-identification. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Vegas, NV, USA, 27–30 June 2016; pp. 1325–1334.
- Yan, Y.; Ni, B.; Song, Z.; Ma, C.; Yan, Y.; Yang, X. Person re-identification via recurrent feature aggregation. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 701–716.
- Yi, D.; Lei, Z.; Liao, S.; Li, S.Z. Deep metric learning for person re-identification. In Proceedings of the 2014 22nd International Conference on Pattern Recognition, Washington, DC, USA, 24–28 August 2014; pp. 34–39.
- Zheng, Z.; Zheng, L.; Yang, Y. A discriminatively learned cnn embedding for person reidentification. ACM Trans. Multimed. Comput. Commun. Appl. (TOMM) 2017, 14, 1–20.
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. Imagenet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255.
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105.
- LeCun, Y.; Boser, B.; Denker, J.; Henderson, D.; Howard, R.; Hubbard, W.; Jackel, L. Handwritten digit recognition with a back-propagation network. Adv. Neural Inf. Process. Syst. 1989, 2, 396–404.
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556.
- Szegedy, C.; Ioffe, S.; Vanhoucke, V.; Alemi, A. Inception-v4, inception-resnet and the impact of residual connections on learning. arXiv 2016, arXiv:1602.07261.
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Vegas, NV, USA, 27–30 June 2016; pp. 770–778.
- Canziani, A.; Paszke, A.; Culurciello, E. An analysis of deep neural network models for practical applications. arXiv 2016, arXiv:1605.07678.
- Gong, S.; Cristani, M.; Yan, S.; Loy, C.C.; Re-Identification, P. Springer Publishing Company. Incorporated 2014, 1447162951, 9781447162957.
- Li, D.; Zhang, Z.; Chen, X.; Ling, H.; Huang, K. A richly annotated dataset for pedestrian attribute recognition. arXiv 2016, arXiv:1603.07054.
- Gray, D.; Tao, H. Viewpoint Invariant Pedestrian Recognition with an Ensemble of Localized Features. In Proceedings of the European Conference on Computer Vision, Marseille, France, 12–18 October 2008; Springer: Berlin/Heidelberg, Germany, 2008; pp. 262–275.
- Lu, X.Y.; Skabardonis, A. Freeway traffic shockwave analysis: Exploring the NGSIM trajectory data. In Proceedings of the 86th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 21–25 January 2007.
- Geiger, A.; Lenz, P.; Stiller, C.; Urtasun, R. Vision meets robotics: The kitti dataset. Int. J. Robot. Res. 2013, 32, 1231–1237.
- Everingham, M.; Van Gool, L.; Williams, C.K.; Winn, J.; Zisserman, A. The pascal visual object classes (voc) challenge. Int. J. Comput. Vis. 2010, 88, 303–338.
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110.
- Zhang, H.; Sindagi, V.; Patel, V.M. Image de-raining using a conditional generative adversarial network. IEEE Trans. Circ. Syst. Video Technol. 2019, 30, 3943–3956.
- Schaefer, G.; Stich, M. UCID: An uncompressed color image database. In Storage and Retrieval Methods and Applications for Multimedia 2004; International Society for Optics and Photonics: Washington, DC, USA, 2003; Volume 5307, pp. 472–480.
- Arbelaez, P.; Maire, M.; Fowlkes, C.; Malik, J. Contour detection and hierarchical image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 33, 898–916.
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612.
- Wang, Z.; Bovik, A.C. A universal image quality index. IEEE Signal Process. Lett. 2002, 9, 81–84.
- Sheikh, H.R.; Bovik, A.C. Image information and visual quality. IEEE Trans. Image Process. 2006, 15, 430–444.
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. In Proceedings of the 32nd Conference on Neural Information Processing Systems, Montreal, QC, Canada, 7–10 December 2015; pp. 91–99.
- Kang, L.W.; Lin, C.W.; Fu, Y.H. Automatic single-image-based rain streaks removal via image decomposition. IEEE Trans. Image Process. 2011, 21, 1742–1755.
- Li, Y.; Tan, R.T.; Guo, X.; Lu, J.; Brown, M.S. Rain streak removal using layer priors. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2736–2744.
- Fu, X.; Huang, J.; Ding, X.; Liao, Y.; Paisley, J. Clearing the skies: A deep network architecture for single-image rain removal. IEEE Trans. Image Process. 2017, 26, 2944–2956.